00196521-02_UM_X-Series_SR70x_JAP.pdf - 第161页
ユーザーマニュアル SIPLACE X シリーズ 3 マシンのテクニカルデータ ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版 3.8 ビジョンシステム 161 3.8 ビジョンシステム 3.8.1 構造 部品カメラは、 各 リボルバヘッドに内蔵されていま す ( ページ 124 の図 3. 5 - 2 、ペ ー ジ 128 の 図 3.5 - 4 参照 )。マルチスターおよびツインスター用固定 P&am…
3 マシンのテクニカルデータ ユーザーマニュアル SIPLACE X シリーズ
3.7 PCB コンベヤシステム ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版
160
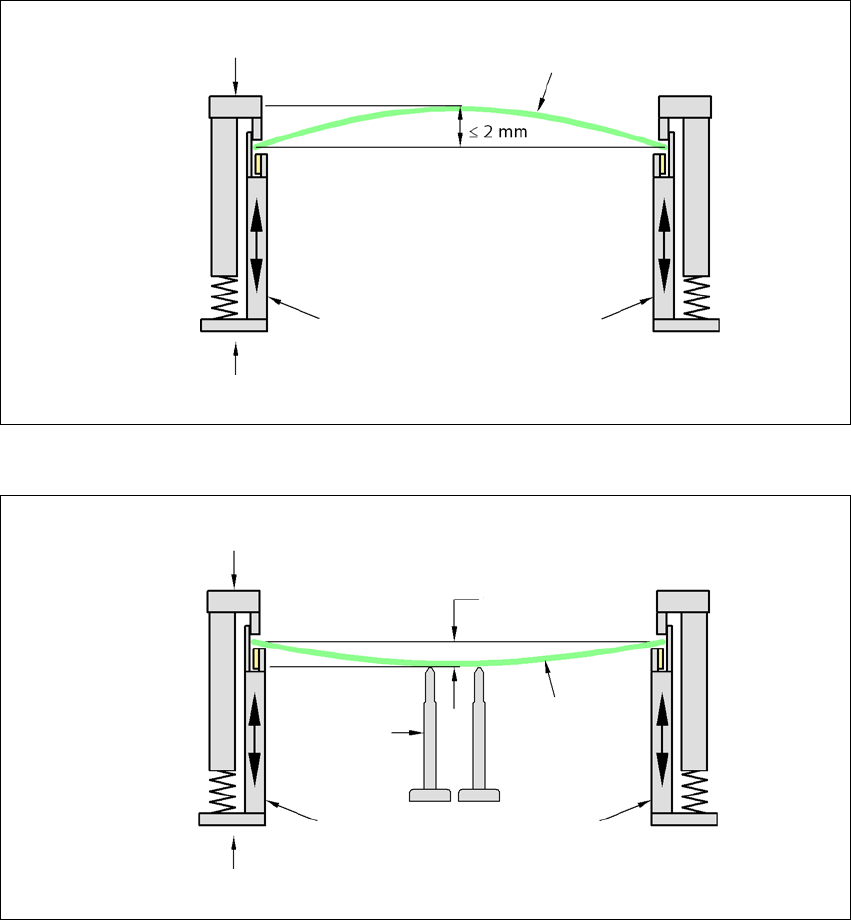
3.7.8.2 実装中の PCB の反り
2 mm の反りがあると、PCB 中央にあるローカルフィデューシャルおよびインクスポットに焦点
を合わせるときに問題が発生する可能性があります。デジタルカメラの焦点は、2 mm です。す
べての許容誤差を考慮に入れると、この値は、1.5 mm に減少します。
反りにより、部品高さ制限も低くなることにご注意ください。
3
3
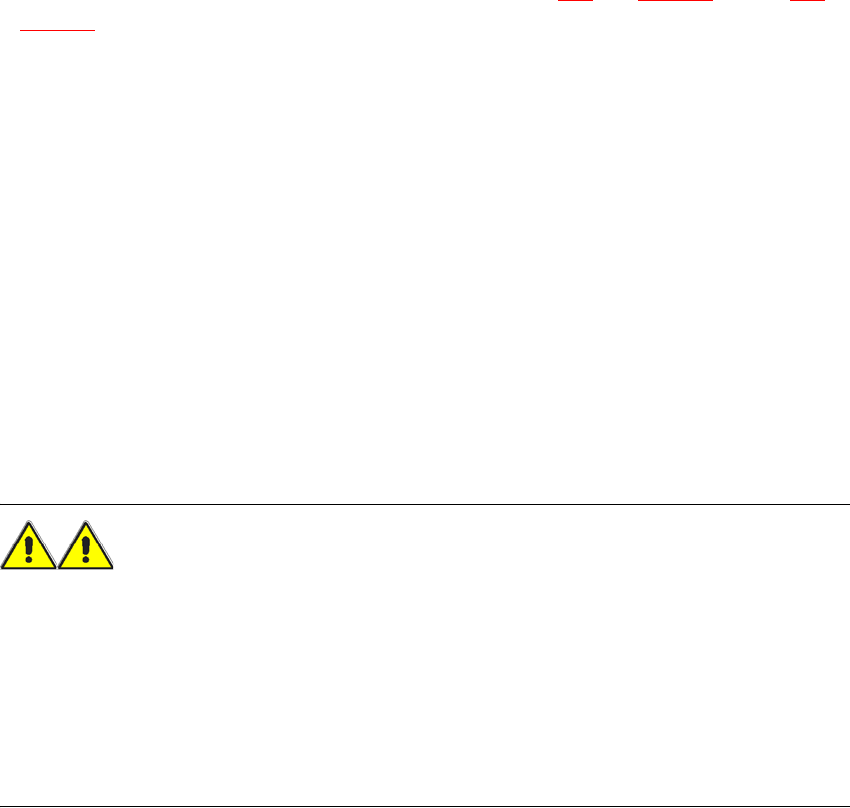
下方向の PCB の反りは、最大 0.5 mm
3
→ マグネットピンサポートを使用してこの値を達成します。
可動クランプ装置
クランプされ固定されたエッジ
PCB
コンベア側壁面
0.5 mm
PCB
マグネットピ
ンサポート
可動クランプ装置
固定クランプエッジ
コンベア側壁面
ユーザーマニュアル SIPLACE X シリーズ 3 マシンのテクニカルデータ
ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版 3.8 ビジョンシステム
161
3.8 ビジョンシステム
3.8.1 構造
部品カメラは、各リボルバヘッドに内蔵されています ( ページ 124 の図 3.5 - 2、ページ 128 の
図 3.5 - 4
参照 )。マルチスターおよびツインスター用固定 P&P 部品ビジョンカメラ ( タイプ
33) 55 x 45 デジタルは、マシンのフレームに固定されています。
部品ビジョンモジュールを使用すると、次のものが決定されます。
– ノズル上の部品の正確な位置、および
– 部品形状のジオメトリ。
PCB ビジョンモジュールは、PCB 上のフィデューシャルを使用すると、次のものが決定されま
す。
– PCB の位置、
– その回転角度、
– および、PCB の歪み。
PCB カメラは、X-Y 軸の下に固定されています。それらは、フィーダ上にあるフィデューシャル
も認識して、部品の正確な吸着位置を決定します。これは、小型部品にとって特に重要です。
警告
ヘッド衝突の危険性 3
実装ヘッドを、ツインスターからスピードスターに変更するとき、ツインスターの固定部品カ
メラ(P&P、タイプ 33、55 x 45、デジタルおよびタイプ 25、16 x 16、デジタル(FC カメラ))
を取り外さなければなりません。さもないと、スピードスターがカメラハウジングと衝突しま
す。
実装ヘッドをツインスターからマルチスターへ交換する場合、固定部品カメラ、タイプ 33、55
x 45、デジタルを下部の位置へ取り付けます。
3 マシンのテクニカルデータ ユーザーマニュアル SIPLACE X シリーズ
3.8 ビジョンシステム ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版
162
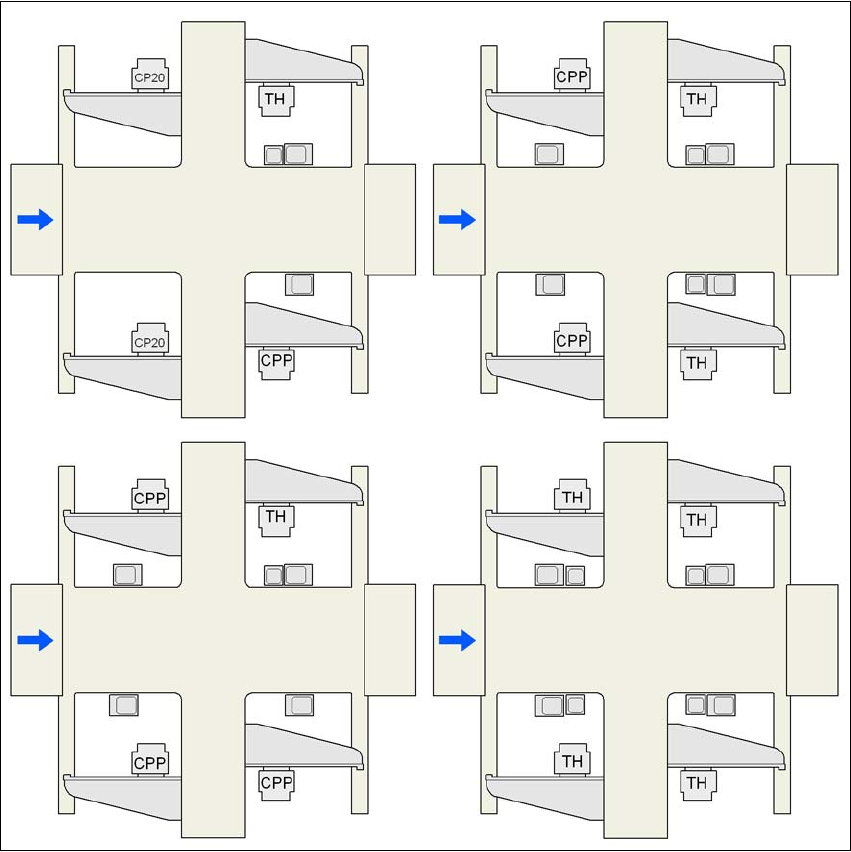
3.8.2 固定カメラのアセンブリ位置 - IC カメラおよび FC カメラ
3.8.2.1 X4 マシンの IC カメラおよび FC カメラ
3
図 3.8 - 1 X4 マシンの IC カメラおよび FC カメラ
CP20 スピードスター
CPP マルチスター
TH ツインスター
25FC カメラ、タイプ 25
33IC カメラ、タイプ 33
G1、 G2、 G3、 G4X-Y 軸 1、 X-Y 軸 2、 X-Y 軸 3、 X-Y 軸 4
33
33
25 および 33 33
33
25 および 33
25 および 33
G3
G3
G4
G4
G1
G2
G2
G1
G4
G3
G2
G1
33
25 および 33
33
33 および 25
33 および 25
25 および 33
25 および 33
G3
G4
G2
G1