hdf.pdf - 第56页
HDF 服务手册 4.3 Robot 头:驱动部 4.3-1 D45SCC-W 1-B00-A0 4.3 Robot 头:驱动部 头:驱动部 头:驱动部 头:驱动部 Sentence No. D45SCC-W 1-B00-A0 4.3.1 更换 更换 更换 更换 H 轴电机 轴电机 轴电机 轴电机 Unit No. 1048509000 更 换 H 轴电 机 ► 更换 更换 更换 更换 H 轴电机 轴电机 轴电机 轴电机 1. 打开电源…
HDF
服务手册
4.2 识别、照明
D45SCC-W0-400-A0 4.2-4
4.2.4 基板相机的补正调整
基板相机的补正调整基板相机的补正调整
基板相机的补正调整
Unit No.
基板相机的矫正调整
4.2.3
基板相机的标
度调整
=准备
准备准备
准备=
1. 最大基板
►基板相机的矫正调整
基板相机的矫正调整基板相机的矫正调整
基板相机的矫正调整
1. 打开电源,返回原点。
2. 将支撑销安装到支撑台上。
3. 将S喷嘴和注射器安装到中间头上。
4. 将基板放到导轨上,将副操作盘上的“SUPPORT
UP”(支架上升)置于[ON]状态。
=确认
确认确认
确认=
确认支撑台处于上升状态。
=提示
提示提示
提示=
将副操作盘上的“DISPENSE” (点胶)置于
[ON]状态,请事先挤出胶。
5. 自动进行十字点胶,(P2-CROSS使用),通过自动
画面的XY轴示教调整,使识别监控器的十字线对准点胶中心。
=提示
提示提示
提示=
P2-CROSS 是程序名。
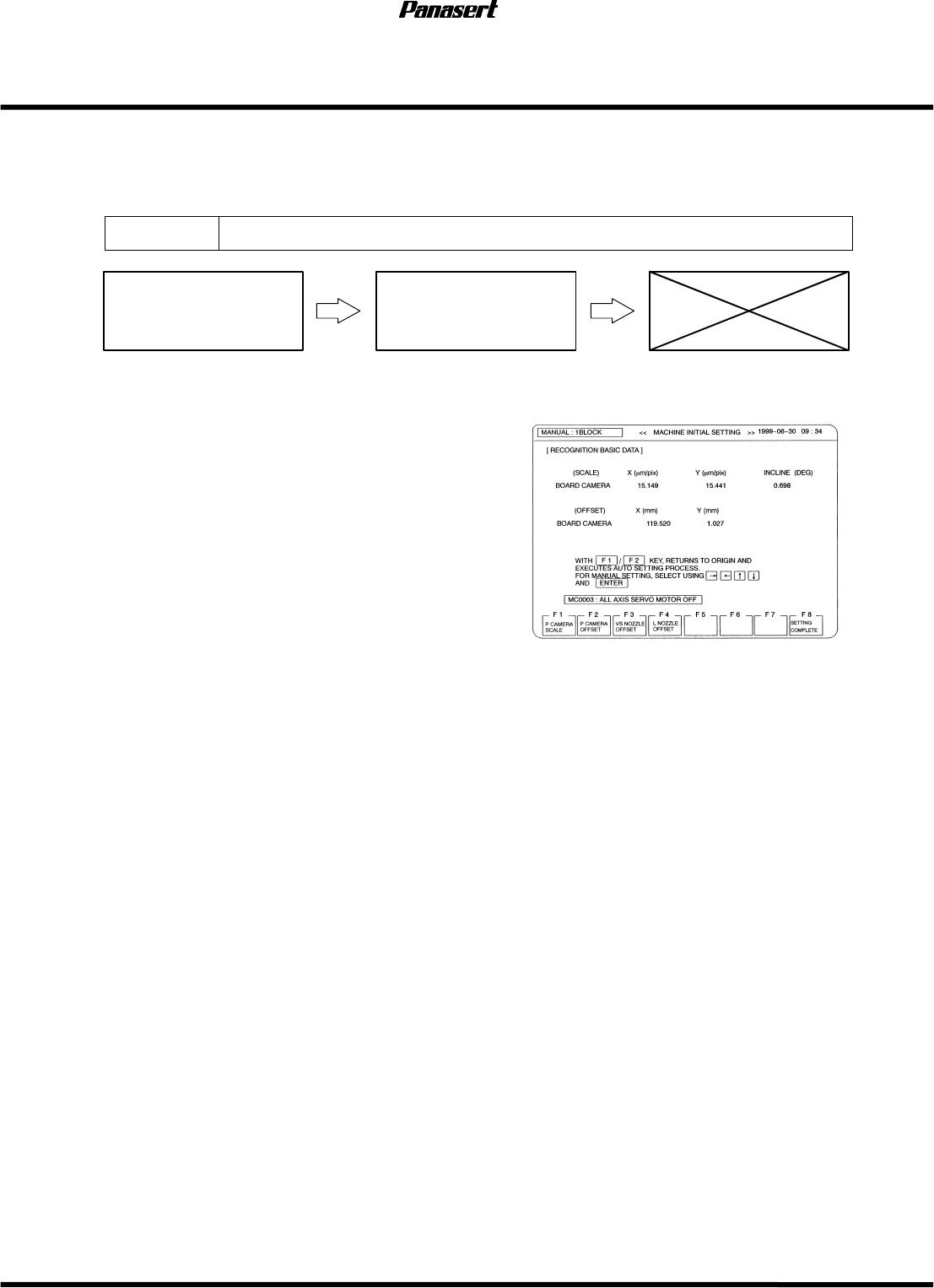
6. 将画面上显示的示教量分别输入到基板相机矫正。
=提示
提示提示
提示=
选择主操作盘上的 “REQUEST” (请求)→ “F8” (NEXT MENU) (下一菜单)→“
““
“F1”
(MACHINE INITIAL SETTING)(机器初始设定)→“
““
“F3” (RECOGNITION BASIC DATA)
(识别基本数据)→“
““
“F2” (PCB CAMERA OFFSET) (基板相机矫正)。
HDF
服务手册
4.3 Robot 头:驱动部
4.3-1 D45SCC-W1-B00-A0
4.3 Robot 头:驱动部
头:驱动部头:驱动部
头:驱动部
Sentence No. D45SCC-W1-B00-A0
4.3.1 更换
更换更换
更换 H 轴电机
轴电机轴电机
轴电机
Unit No.
1048509000
更换
H
轴电机
►更换
更换更换
更换 H 轴电机
轴电机轴电机
轴电机
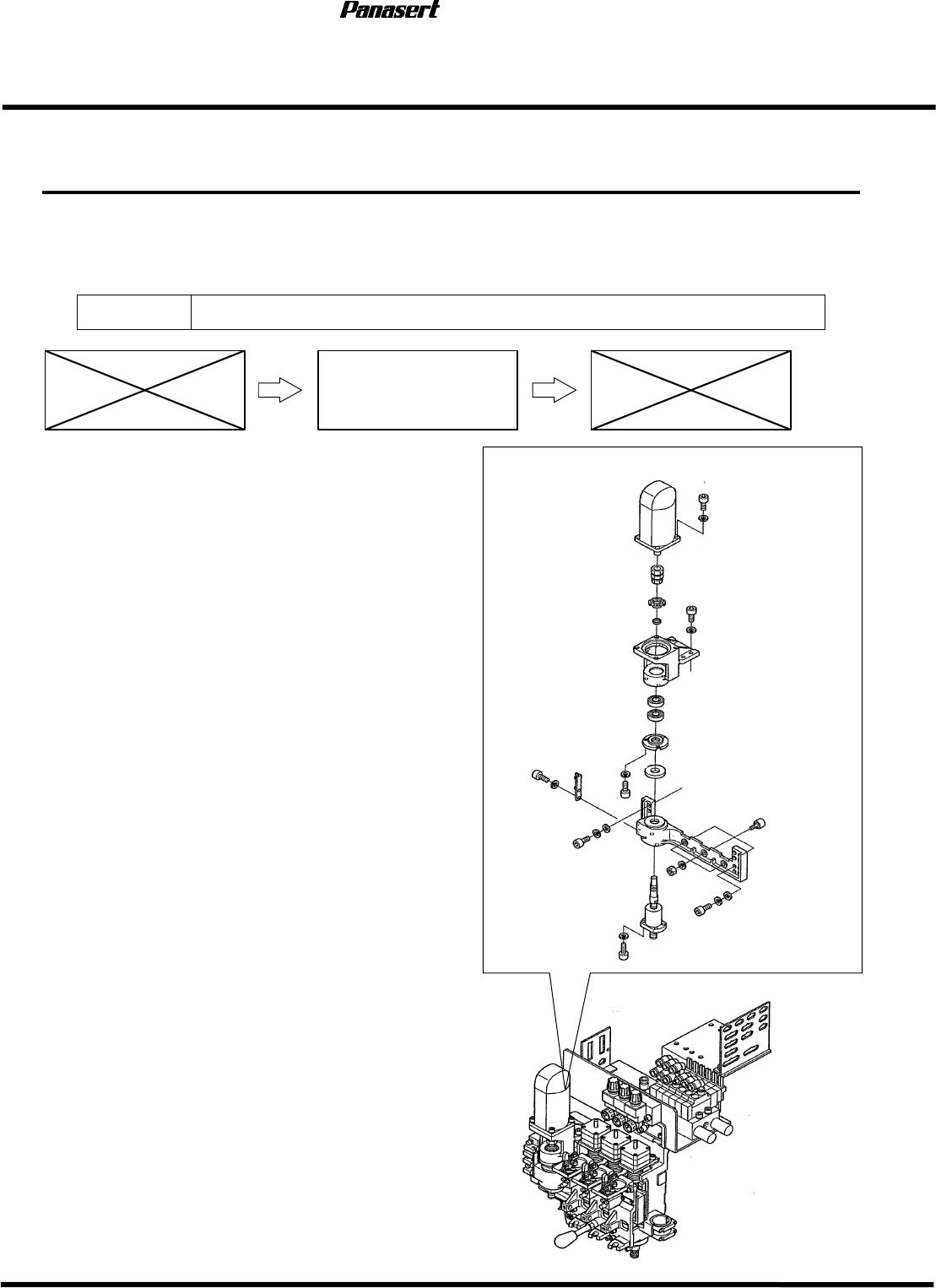
1. 打开电源,返回原点。
2. 将主操作盘上的“SERVO MOTOR” (伺服电
机)置于 [OFF]。
3. 为了方便操作,手动移动头组件。
4. 卸下电机电缆的连接器。
5. 拧松联轴节的电机一侧的锁紧螺母。
6. 卸下电机螺栓(4个),从电机托架上卸下电
动机。
7. 将新的电机安装到电机托架上,拧紧电机螺栓。
8. 连接电机电缆的连接器。
9. 拧紧联轴节的电机一侧的锁紧螺母。
10. 将主操作盘上的“SERVO MOTOR”(伺服电
机)置于 [ON]。
11. 调整H轴原点。
=参考
参考参考
参考=
请参照 “4.3.5 H轴原点调整”。
12. 调整H轴极限。
=参考
参考参考
参考=
请参照 “4.3.6 H轴极限调整”。
头组
件
H
轴电机
电机螺栓
电
机托架螺
栓
电机托架
联轴节
HDF
服务手册
4.3 Robot 头:驱动部
D45SCC-W1-B00-A0 4.3-2
4.3.2 更换
更换更换
更换胶旋转用轴
胶旋转用轴胶旋转用轴
胶旋转用轴
Unit No.
1048509000
更换胶旋转用轴
=准备
准备准备
准备=
1. 涨钳(C环用)
►更换胶旋转用轴
更换胶旋转用轴更换胶旋转用轴
更换胶旋转用轴
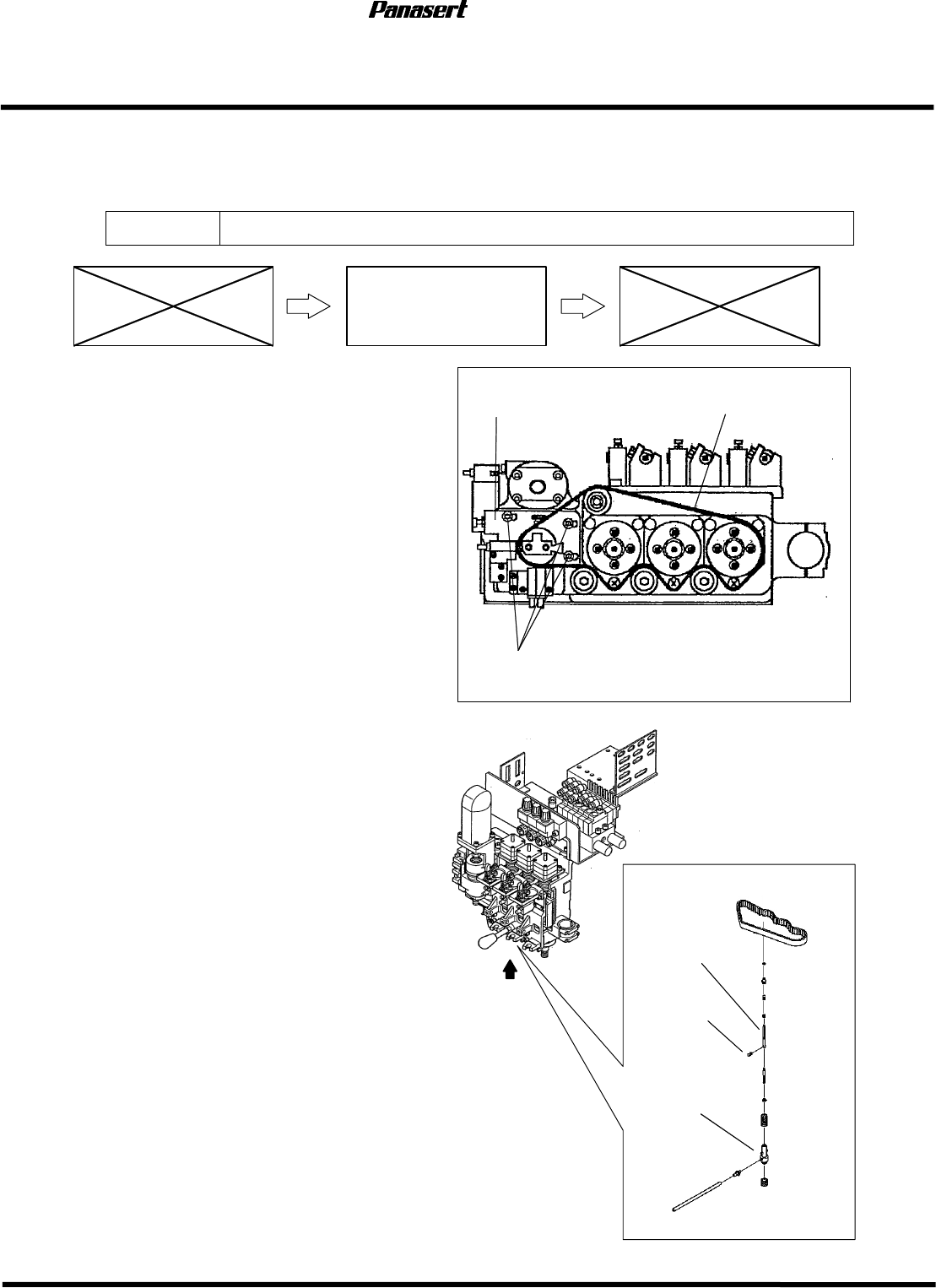
1. 打开电源,返回原点。
2. 将主操作盘上的“SERVO MOTOR”
(伺服电机)置于 [OFF]。
3. 卸下安装在行程轴上的所有空气软管。
4. 拧松θ轴电机机架螺栓(3个)。.
5. 移动电机机架,卸下θ轴同步皮带。
6. 把着喷嘴托架,拆卸喷嘴部。
7. 拧松内六角形固定螺丝。
8. 更换轴。
9. 拧紧内六角形固定螺丝 。
θ 轴同步皮带
电机托架
喷嘴部
内六角形
固定螺丝
轴
喷嘴托架
[
从
A
侧
看的视图
]
A
电机托架螺栓