hdf.pdf - 第64页
HDF 服务手册 4.3 Robot 头:驱动部 4.3-9 D45SCC-W 1-B00-A0 4.3.6 H 轴极限调整 轴极限调整 轴极限调整 轴极限调整 Unit No. 1048509000 H 轴 极 限 调 整 4.3.5 H 轴 原点 调 整 ► H 轴极限调整 轴极限调整 轴极限调整 轴极限调整 1. 打开电源,返回原点。 2. 通过 NC 轴 JOG 确认移动 H 轴到如下所示位置。 H 轴极限位置 轴极限位置 轴极…
HDF
服务手册
4.3 Robot 头:驱动部
D45SCC-W1-B00-A0 4.3-8
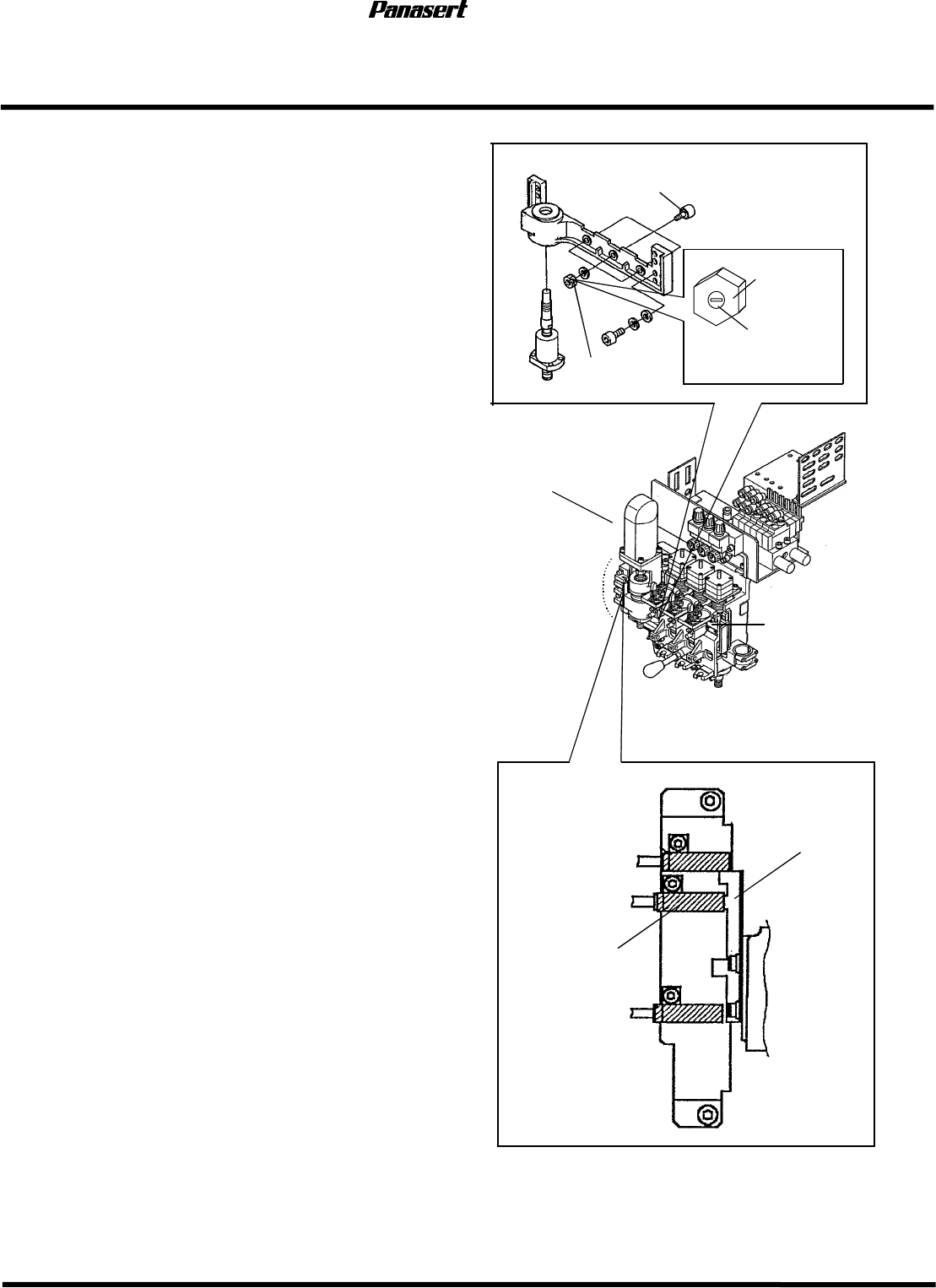
13. 使用弹簧压紧用托架,释放L、VS喷嘴。
=提示
提示提示
提示=
在点胶状态下调整。
14. 调整S喷嘴高度的时候,拧松H轴电机联轴
节,调整块规和喷嘴平行调整治具之间的
间隙。
15. 调整L、VS喷嘴高度的时候,拧松螺母,
用(-) 螺丝刀旋转偏心凸轮从动轮。
16. 拧紧螺母。
17. 再次确认喷嘴平行调整治具和块规的间隙。
18. 用乙烯绝缘带遮H轴原点传感器的光。
19. 用NC轴JOG 确认使其返回原点。
20. 从H轴原点传感器卸下乙烯绝缘带。
21. 使传感器挡片对准H轴原点传感器。
=确认
确认确认
确认=
确认H 轴原点传感器的LED处于关灯状
态。
偏心凸轮从动轮
螺母
H
轴
原点
传
感器
H
轴电
机
传感器挡片
机盖
螺母
偏心凸轮从动轮
HDF
服务手册
4.3 Robot 头:驱动部
4.3-9 D45SCC-W1-B00-A0
4.3.6 H 轴极限调整
轴极限调整轴极限调整
轴极限调整
Unit No.
1048509000
H
轴
极限调整
4.3.5 H
轴原点调整
►H 轴极限调整
轴极限调整轴极限调整
轴极限调整
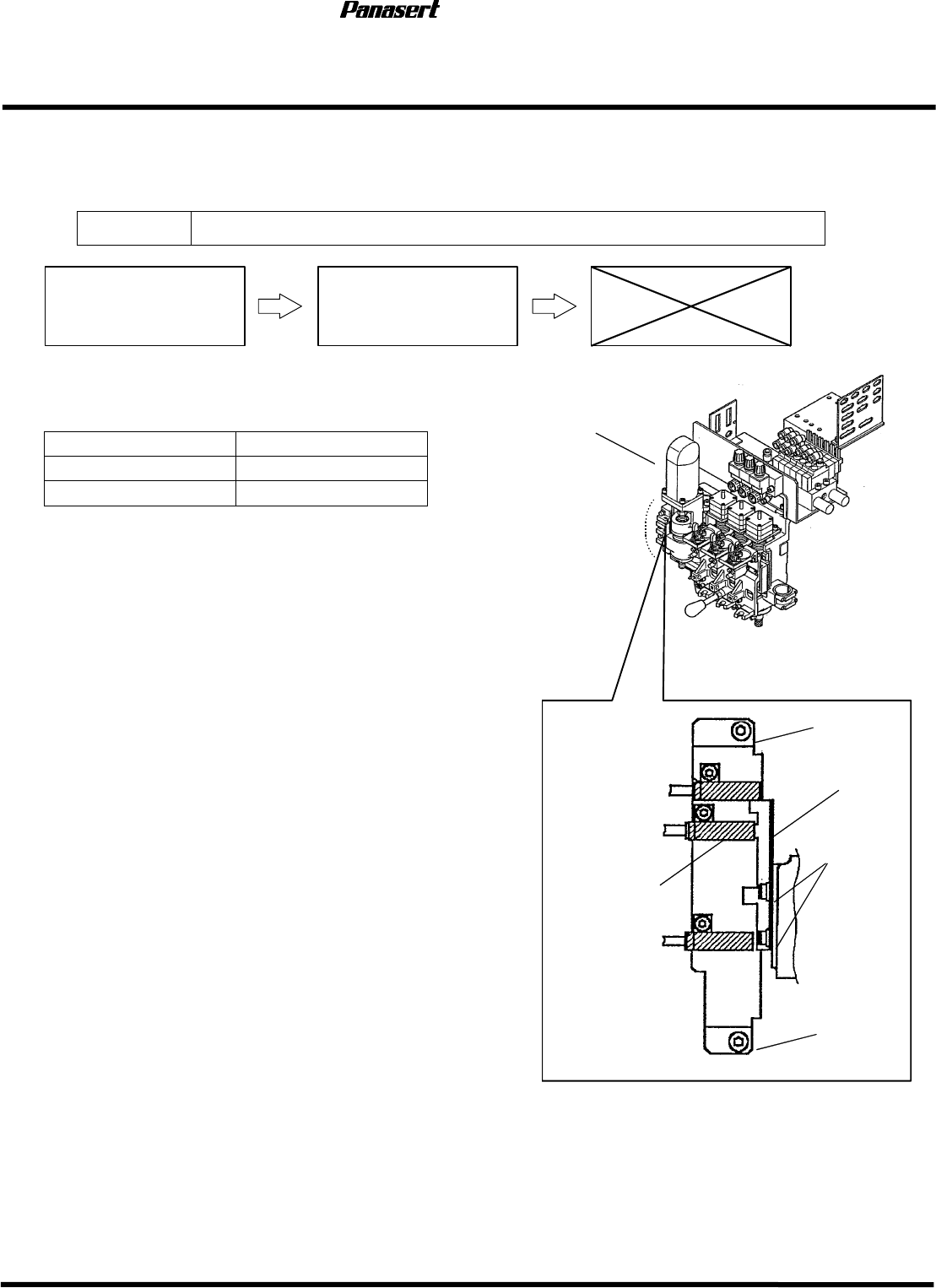
1. 打开电源,返回原点。
2. 通过NC轴JOG 确认移动H轴到如下所示位置。
H 轴极限位置
轴极限位置轴极限位置
轴极限位置
(+) 1st 极限
14.0 mm
(-) 1st 极限
-3.0 mm
3. 确认各极限传感器的LED 处于关灯状态。
=规格值
规格值规格值
规格值=
在±0.05 mm以内
以内以内
以内
4. 规格值以外时,拧松传感器挡片螺栓进行调整。
5. 拧紧传感器挡片螺栓。
6. 返回原点。
7. 再次确认各极限传感器的LED 处于关灯状态。
8. 如即使这样,LED 仍然不能正常关灯,则拧松螺栓
(2个),调整传感器位置,使其正常关灯。
9. 返回原点。
10. 再次确认各极限传感器的LED 处于关灯状态。
H
轴电机
传感器挡片
螺栓
螺栓
螺栓
传感器挡片
H
轴原点传感器
HDF
服务手册
4.3 Robot 头:驱动部
D45SCC-W1-B00-A0 4.3-10
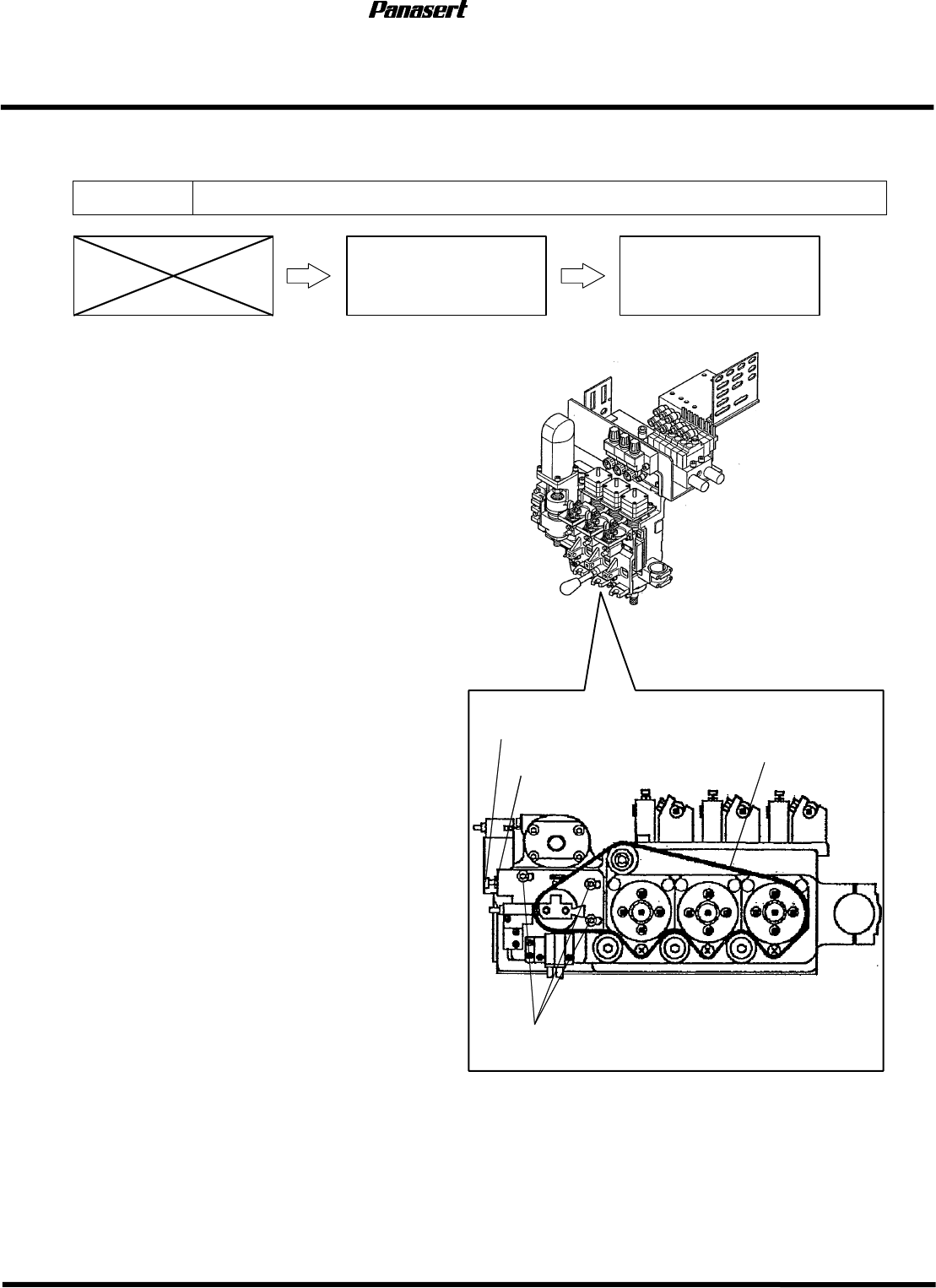
4.3.7更换θ轴同步皮带
更换θ轴同步皮带更换θ轴同步皮带
更换θ轴同步皮带
Unit No.
1048509000
更换
θ
轴同步皮带
4.4.1
喷嘴高度调整
►更换
更换更换
更换θ
θθ
θ轴同步皮带
轴同步皮带轴同步皮带
轴同步皮带
1. 打开电源,返回原点。
2. 记录现在的极限值。
=注意
注意注意
注意=
如果同步皮带已被切断,不需要记录现在
的极限值。
3. 关闭电源。
4. 为了容易操作,手动移动头组件。
5. 拧松锁紧螺母和张力调整螺栓。
6. 拧松电机托架螺栓(3个)。
7. 移动电机托架,卸下同步皮带。
8. 安装新的同步皮带。
=注意
注意注意
注意=
请注意不要移动θ轴的皮带轮。
9. 暂时拧紧电机托架螺栓(3个)。
10. 调整同步皮带张力。
=规格值
规格值规格值
规格值=
张力: 45.1 ± 4.8N
(4.6±0.5kgf)
=参考
参考参考
参考=
请参照“4.3.4θ轴同步皮带张力调整”。
11. 打开电源。
12. 返回原点。
13. 调整θ轴原点。
14. 参考更换同步皮带前的极限值,调整θ轴
极限 。
=规格值
规格值规格值
规格值=
(-) 极限: -93.5±1°
(+) 极限: 93.5±1°
张
力
调
整螺栓
电动机托架螺栓
锁紧螺母
θ 轴同步皮带