d3d0ce138ca24795908a3a1082370403.pdf - 第179页
EX 系列远程 IO-用户手册 178 图 6-3-2 基本配置流程 点动控制模式配置流程,如图 6-3-3 所示 图 6-3-3 点动模式配置流程 定位控制模式配置流程,如图 6-3-4 所示 图 6-3-4 定位控制模式配置
EX 系列远程 IO-用户手册
177
6.3 模块的使用
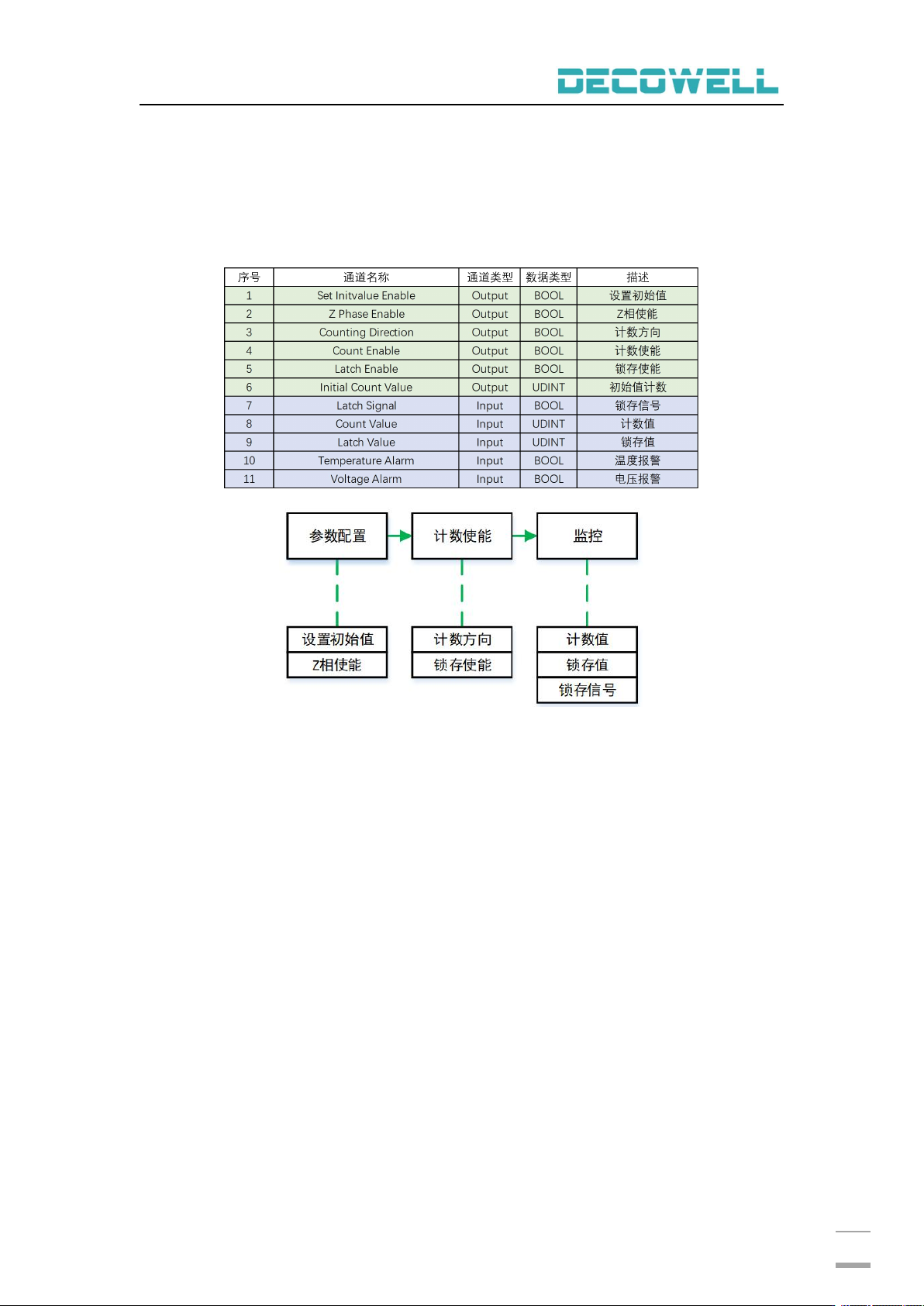
6.3.1 编码器模块
编码器模块中,有三种信号类型分别是差分、NPN、PNP,但是模块使用为一
致,输入输出如表 6-3-1 所示,基本配置流程如图 6-3-1 所示。
表 6-3-1 编码器模块输入输出通道
图 6-3-1 基本配置流程
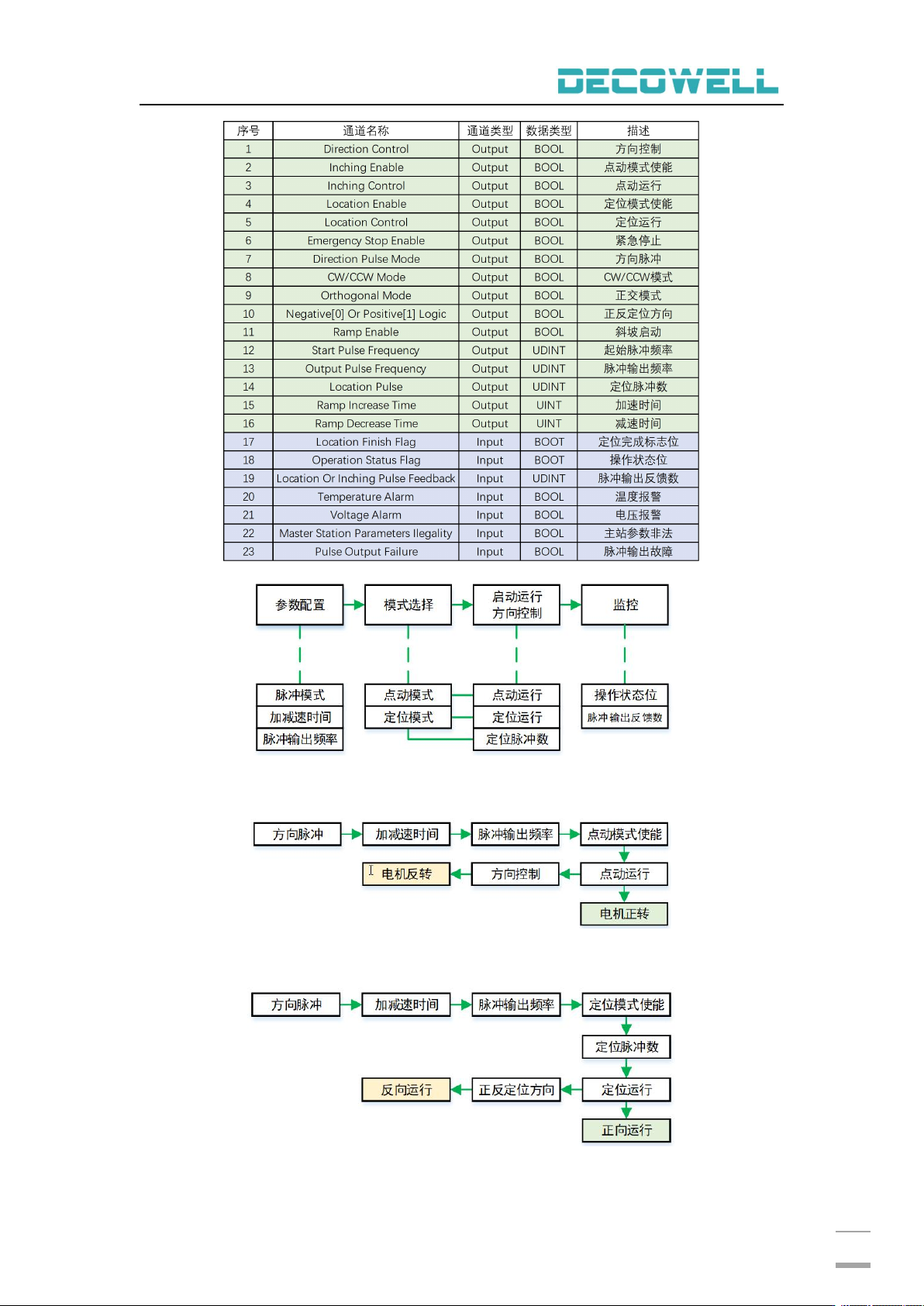
6.3.2 高速脉冲输出模块
高速脉冲输出模块中,有三种信号类型分别是差分、NPN、PNP,但是模块使
用为一致,输入输出如表 6-3-2 所示,基本配置流程如图 6-3-2 所示。
表 6-3-2 高速脉冲输出模块输入输出通道
EX 系列远程 IO-用户手册
178
图 6-3-2 基本配置流程
点动控制模式配置流程,如图 6-3-3 所示
图 6-3-3 点动模式配置流程
定位控制模式配置流程,如图 6-3-4 所示
图 6-3-4 定位控制模式配置
EX 系列远程 IO-用户手册
179
6.3.3 EX-6311/6301 自由通讯模块使用
模块通讯方式总共有 4 种分别为:
①Send-Rev 模式:触发模式、按字符间隔接收;
②Send-Send 模式:触发发送模式;
③Rev-Send 模式:触发发送模式、按字符间隔接收;
④Rev-Rev 模式:按字符间隔接收。
通讯参数,如表 6-3-3 所示
表 6-3-3 通讯参数
参数名称
参数含义
参数
BaudRate
波特率
1200/2400/4800/9600(默认)
/19.2K/38.4K/57.6K/115.2K
Data Bits
数据位
5 位/6 位/7 位/8 位(默认)
Parity Bits
校验位
无校验(默认)/奇校验/偶校验
Stop Bits
停止位
1 位(默认)/2 位
Interval Time
自动定时发送功能
定时发送间隔时间从 50ms 到 10s 可选(默认
1s)
Comm Mode
通讯模式选择
M/S(主站/从站),默认为主站模式
注意:参数设置需要在模块运行前配置,如使用 TwinCAT 则在 Startup 中设置;在 OMROM
软件中需要在模块的编辑初始化参数设置中找到对应的模块并设置;如不需设置则采用默
认值,不需操作即可。
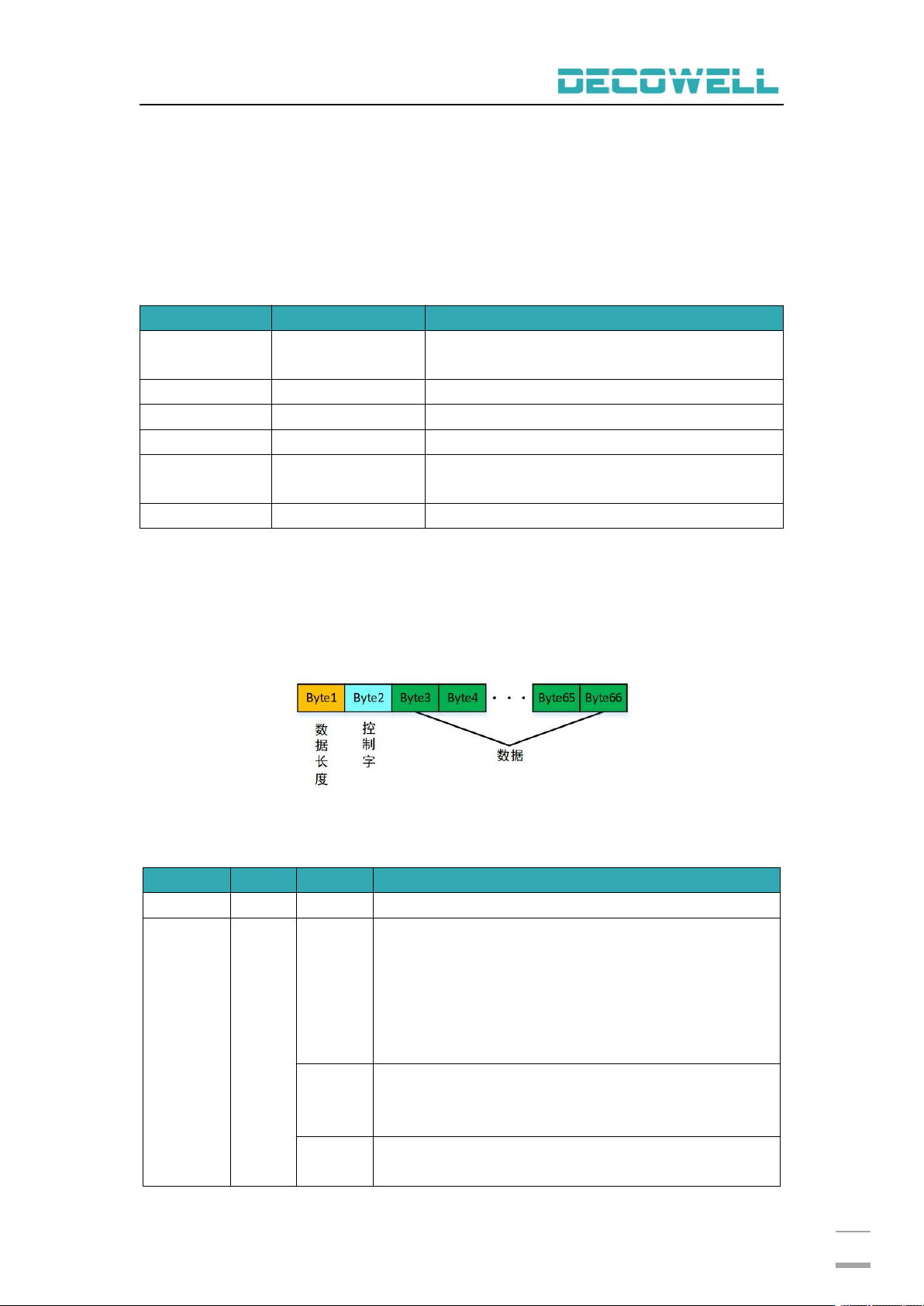
过程数据-输出数据
输出数据长度为 66 个字节,前面 2 个字节为分别为数据长度以及控制字,后面
64 个字节为数据字节,如图 6-3-5 所示。
图 6-3-5 过程数据-输出数据
数据长度以及控制字中单个位的含义,如表 6-3-4 所示。
表 6-3-4 数据长度以及控制字
名称
长度
位定义
数据长度
1 字节
—
数据长度为 N,N 值最大为 64
控制字
1 字节
Bit0
TxE 启动发送标记
当 TxM =0 时是触发模式,此时仅当 TxE 由 0 变 1(上
升沿)时,触发一次发送。
当 TxM=1 时是自动发送模式
此时仅当 TxE=1 时,模块按照配置信息中选择的“自
动发送间隔时间”,自动连续发送。
Bit1
TxM 发送模式
TxM=0:触发发送模式
TxM=1:自动定时发送模式
Bit2
relen 按长度接收
relen=0 按字符间隔接收:当接收到一个字符后连续