d3d0ce138ca24795908a3a1082370403.pdf - 第64页
EX 系列远程 IO-用户手册 63 图 5-1-22 添加设备 图 5-1-23 选择 EtherCAT 总线 为 EtherCAT Master 分 配 网 口 , 在 设 备 树 中 双 击 “ EtherCAT_Master”> “EtherCAT NIC 设置”> “浏览” ,如图 5-1-24 所示。 图 5-1-24 分配网口
EX 系列远程 IO-用户手册
62
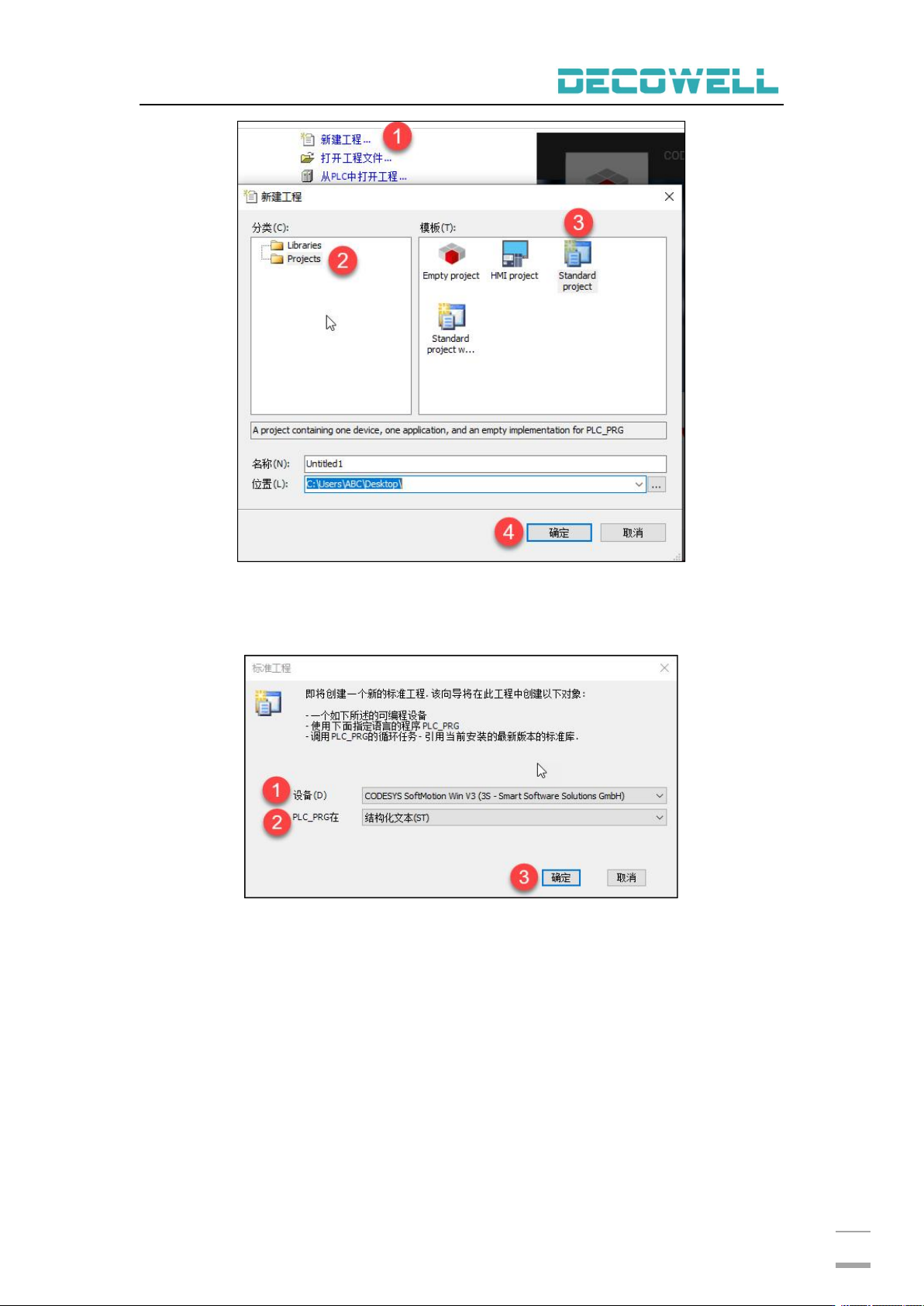
图 5-1-20 新建工程
在标准工程窗口中设备选择“CODESYS SoftMotion Win V3”,PLC_PRG 编程
语言选择“结构化文本(ST)”,如图 5-1-21 所示。
图 5-1-21 选择设备与编程语言
提示:Softmotion 能带驱动与 I/O,Control 只能带 I/O 而不能带驱动。
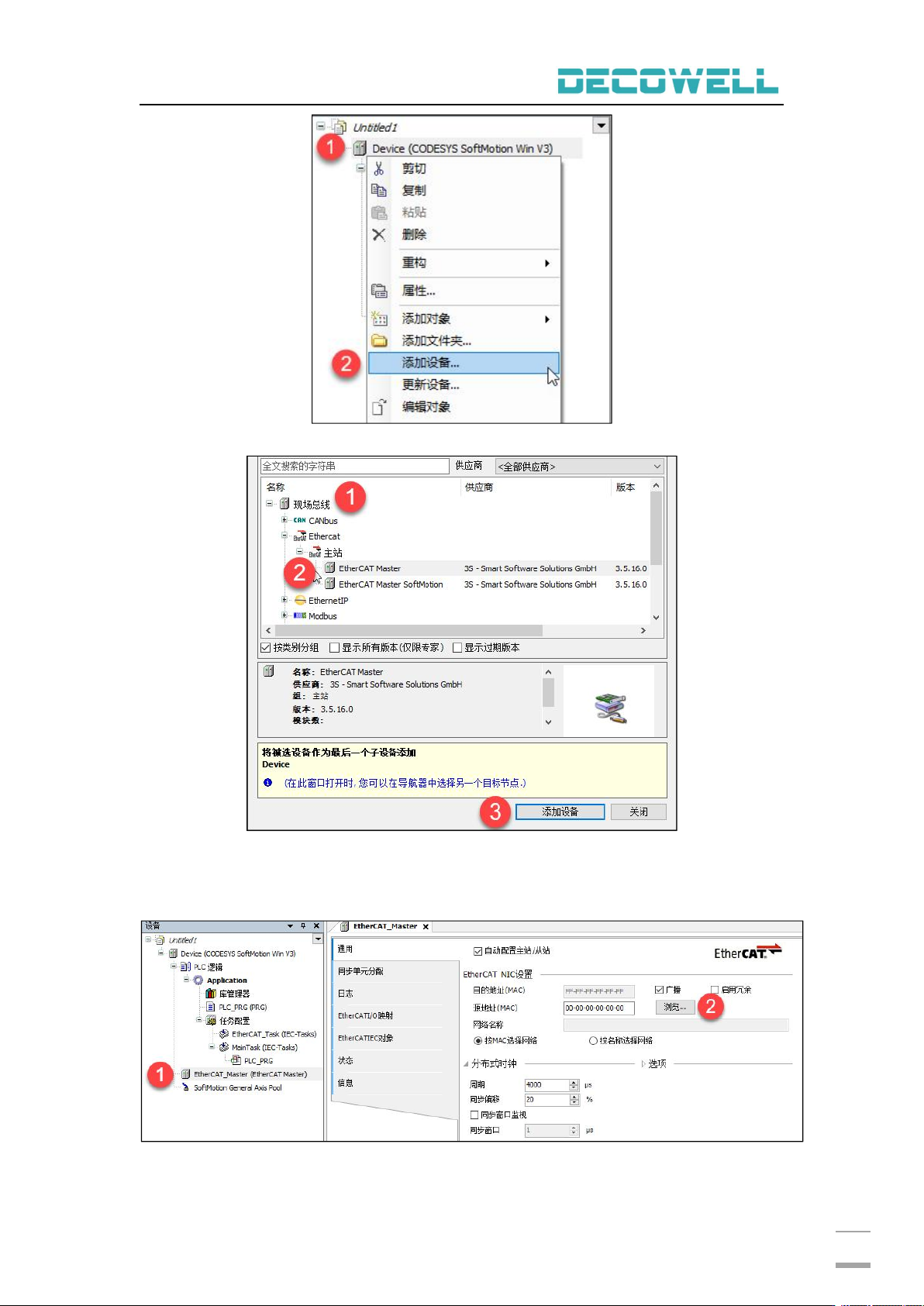
在设备树中“Device(CODESYS SoftMotion Win V3)”>“添加设备”,如图
5-1-22 所示,在添加设备窗口中选择“现场总线”>“EtherCAT”>“EtherCAT
Master”,如图 5-1-23 所示。
EX 系列远程 IO-用户手册
63
图 5-1-22 添加设备
图 5-1-23 选择 EtherCAT 总线
为 EtherCAT Master 分 配 网口, 在 设备 树 中双击“ EtherCAT_Master”>
“EtherCAT NIC 设置”> “浏览”,如图 5-1-24 所示。
图 5-1-24 分配网口
EX 系列远程 IO-用户手册
64
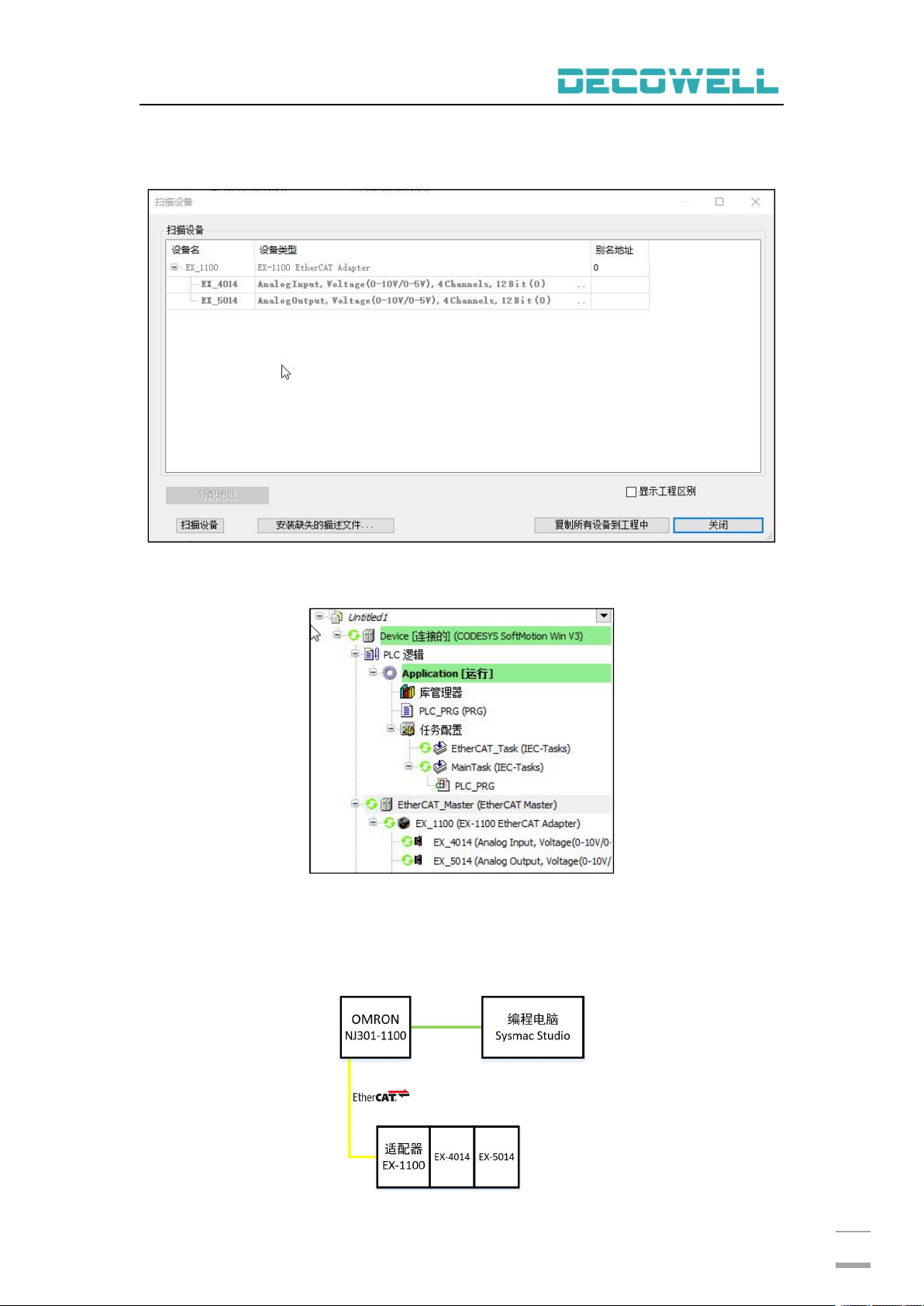
提示:在分配网口前,需要将工程下载到控制器中
将实际硬件组态扫描到工程中,右击“EtherCAT_Master”>“扫描设备”,
在扫描窗口中可以看到实际硬件组态,如图 5-1-25 所示。
图 5-1-25 扫描设备
5、程序下载运行并监控,监控结果如图 5-1-26 所示。
图 5-1-26 监控结果
5.1.4 Sysmac Studio 与 EX-1100 连接及其配置
1、通讯连接图,如图 5-1-27 所示。