OM-1077-002.pdf - 第102页
Tg0531-PM-SO 5.3.4 5.3.4 5.3.4 5.3.4 5.3.4 “ “ “ “ “ ト ト ト ト ト レ レ レ レ レ イ イ イ イ イ 偏 偏 偏 偏 偏 心 心 心 心 心 吸 吸 吸 吸 吸 着 着 着 着 着 位 位 位 位 位 置 置 置 置 置 教 教 教 教 教 示 示 示 示 示 [ [ [ [ [ 吸 吸 吸 吸 吸 着 着 着 着 着 位 位 位 位 位 置 置 置 置 置 補 補 補 補…
Tg0531-PM-SO
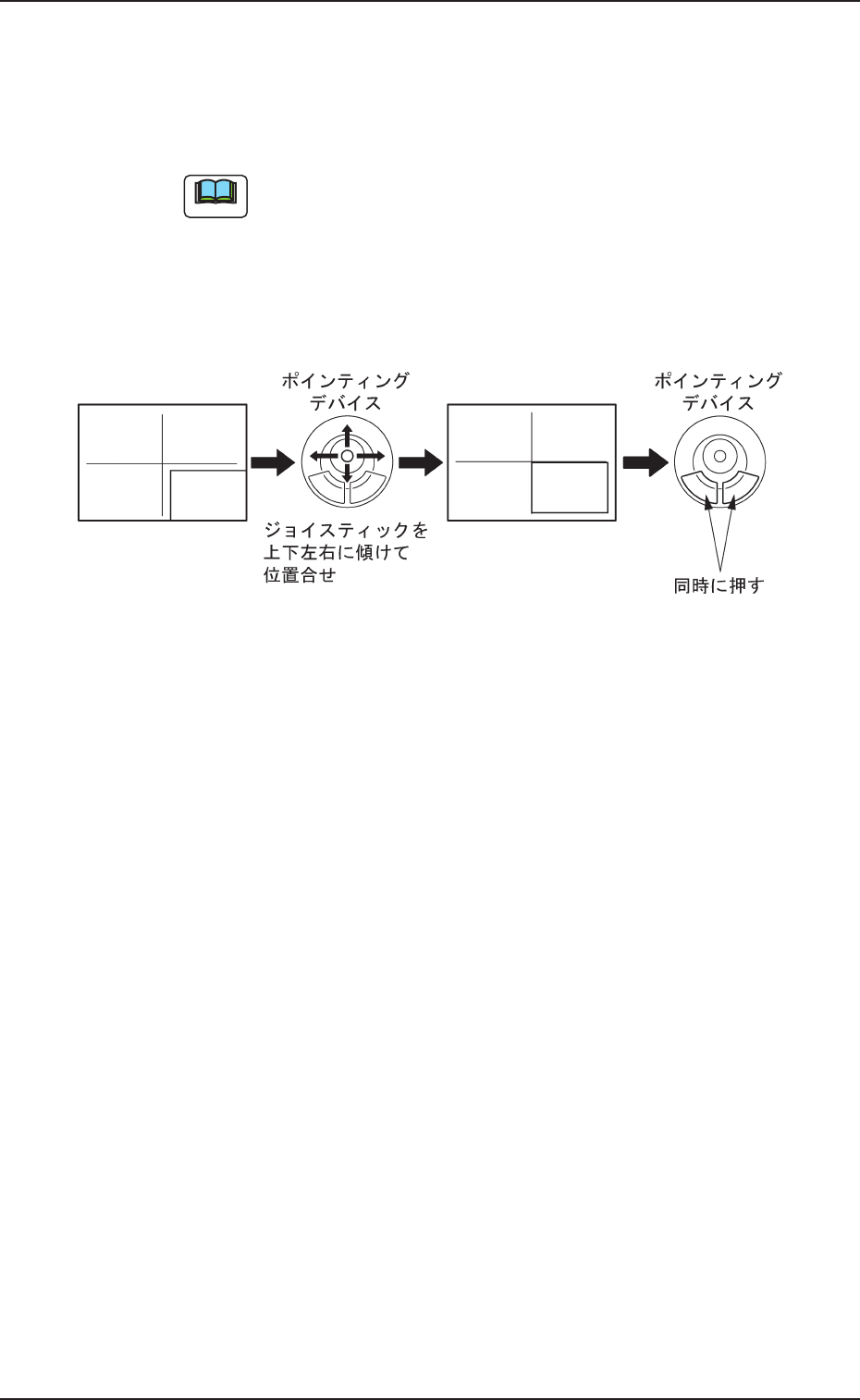
(3) [2点目] ボタンを選択後、 作動 [ON] ボタンを押した後、2秒
以内に操作パネルの [ENABLE] ボタンを押すと、指定した
フィーダ番号の位置へ基板認識カメラが移動します。
認識画面上にクロス十字 (2 点目) が表示されます。
作動 [ON] ボタンが画像に隠れて見えない場合は、画
像に軽くタッチし、消してからボタンを押してくださ
い。
(4) ポインティングデバイスを使用し、位置を合せてポインティン
グデバイスの左右のボタンを同時に押します。
Fig. B18Fig. B18
Fig. B18Fig. B18
Fig. B18
0309-002 2-29
5.3 “ティーチング”サブメニュー
ࡁ࠻
Tg0531-PM-SO
5.3.45.3.4
5.3.45.3.4
5.3.4
““
““
“
トト
トト
ト
レレ
レレ
レ
イイ
イイ
イ
偏偏
偏偏
偏
心心
心心
心
吸吸
吸吸
吸
着着
着着
着
位位
位位
位
置置
置置
置
教教
教教
教
示示
示示
示
[[
[[
[
吸吸
吸吸
吸
着着
着着
着
位位
位位
位
置置
置置
置
補補
補補
補
正正
正正
正
]]
]]
]
””
””
”
画面画面
画面画面
画面
トレイフィーダで供給する部品の中心での吸着に支障があるときに
偏心吸着補正位置の教示を行います。
••
••
•
画面の表示画面の表示
画面の表示画面の表示
画面の表示
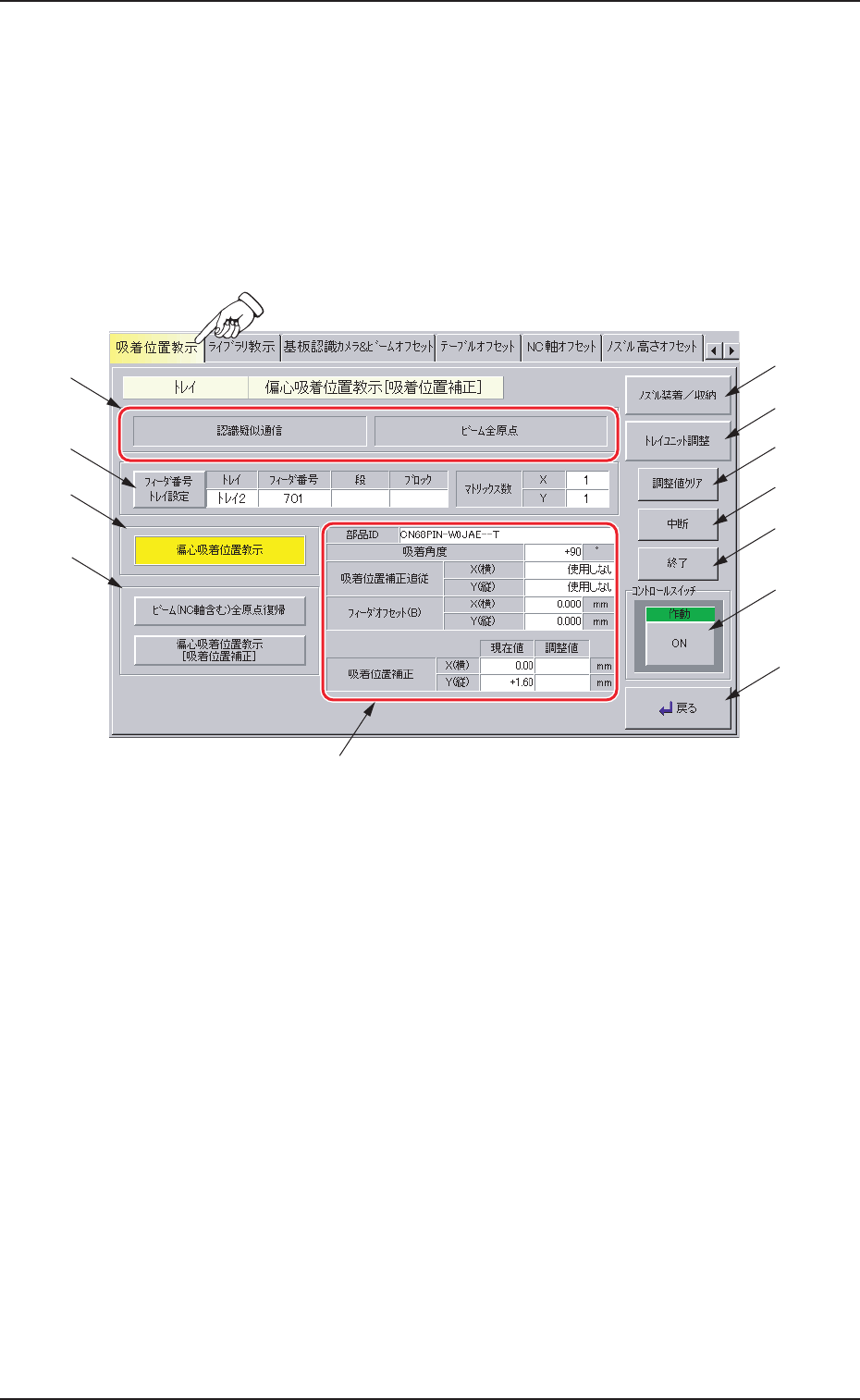
“吸着位置教示”タブシートで、[トレイ偏心吸着位置教示[吸着
位置補正]]ボタンを押すと、以下の画面が表示されます。
0309-002 2-30
Fig. B19 Fig. B19
Fig. B19 Fig. B19
Fig. B19
““
““
“
トト
トト
ト
レレ
レレ
レ
イイ
イイ
イ
偏偏
偏偏
偏
心心
心心
心
吸吸
吸吸
吸
着着
着着
着
位位
位位
位
置置
置置
置
教教
教教
教
示示
示示
示
[[
[[
[
吸吸
吸吸
吸
着着
着着
着
位位
位位
位
置置
置置
置
補補
補補
補
正正
正正
正
]]
]]
]
””
””
”
画面画面
画面画面
画面
5.3 “ティーチング”サブメニュー
Tg0531-PM-SO
••
••
•
画面の構成画面の構成
画面の構成画面の構成
画面の構成
*1*1
*1*1
*1
設定状態の表示設定状態の表示
設定状態の表示設定状態の表示
設定状態の表示
テスト運転の基板認識または部品認識が“疑似通信”に設定さ
れている場合、“認識疑似通信”表示の背景色がライトレッドに
なります(通常は背景色なし)。
疑似通信時に、ティーチング動作を実行しても認識処
理が実行されないため、各種ティーチングの正しい結
果が得られませんので注意してください。
“ビーム全原点復帰”が完了している場合、“ビーム全原点”表
示の背景色が緑色になります(セットアップされていないとき
は背景色なし)。
(a) 各部がセットアップされていない状態でティーチン
グを行うと、オフセット値が正しくティーチングで
きない場合がありますので注意してください。
(b) 必ず“ビーム全原点復帰”を実行してからティーチ
ングを行ってください。
*2*2
*2*2
*2
フィーダ番号設定フィーダ番号設定
フィーダ番号設定フィーダ番号設定
フィーダ番号設定
ティーチングを行うフィーダ番号を設定します。
[フィーダ設定]ボタンを押すと、“フィーダ番号設定”画面が
表示されます。
“5.3.6 フィーダ番号設定”画面を参照してください。
*3*3
*3*3
*3
[[
[[
[
偏心吸着位置教示偏心吸着位置教示
偏心吸着位置教示偏心吸着位置教示
偏心吸着位置教示
] ]
] ]
]
ボタンボタン
ボタンボタン
ボタン
このボタンを押して、作動[ON]ボタンを押した後、2 秒以内に
操作パネルの[ENABLE]ボタンを押すと、基板認識カメラを該
当フィーダの部品中心位置(設計位置 + フィーダオフセット
(B)の位置)を基準に、部品ライブラリで指定された吸着位置補
正位置へ移動して画像を取込みます。この状態でポインティン
グデバイス操作に移行し、目合わせを実行します。
偏心吸着位置教示を実施する場合は、その前に必要な
部品中心位置を正しく教示しておく必要があります。
0309-002 2-31
5.3 “ティーチング”サブメニュー
ࡁ࠻
ࡁ࠻
ࡁ࠻