OM-1077-002.pdf - 第48页
Tg0531-PM-SO 1.3 1.3 1.3 1.3 1.3 部品の供給のしくみ 部品の供給のしくみ 部品の供給のしくみ 部品の供給のしくみ 部品の供給のしくみ (1) トレイ(パレット)がパターンプログラムデータにしたがって、 エレベータ部に収納されたラックから、トラバースによりトラ バース上に引き出されます。 (2) 本体装置の装着ヘッドが、トラバース上に引き出されたトレイ から部品を取り出します。 (3) 装着ヘッドで取り出し…
Tg0531-PM-SO
(3) ラック
Fig. A12Fig. A12
Fig. A12Fig. A12
Fig. A12
Fig. A13Fig. A13
Fig. A13Fig. A13
Fig. A13
パレットをセットするための機構です。
0309-003 1-11
1.2 各部の名称と機能
ࠛࡌ࠲ㇱ
#..
4'#&;
%*#0)'
*1/'
215+6+10 219'4
'.'8
Tg0531-PM-SO
1.3 1.3
1.3 1.3
1.3
部品の供給のしくみ部品の供給のしくみ
部品の供給のしくみ部品の供給のしくみ
部品の供給のしくみ
(1) トレイ(パレット)がパターンプログラムデータにしたがって、
エレベータ部に収納されたラックから、トラバースによりトラ
バース上に引き出されます。
(2) 本体装置の装着ヘッドが、トラバース上に引き出されたトレイ
から部品を取り出します。
(3) 装着ヘッドで取り出した部品を部品認識カメラにて撮像および
認識して吸着位置ズレを補正して正確な位置に部品を装着しま
す。なお、部品を認識したとき吸着異常または認識異常を検出
すると、部品排出動作が行われます。
(4) トラバース上のトレイは、エレベータ内に収納され、次のトレ
イがパターンプログラムデータにしたがってトラバース上に引
き出されます。なお、次に装着される部品が同じトレイからの
場合は、トレイはそのままトラバース上に待機します。
(5) 手順(2)∼(4)を繰返します。
Fig. A14 Fig. A14
Fig. A14 Fig. A14
Fig. A14
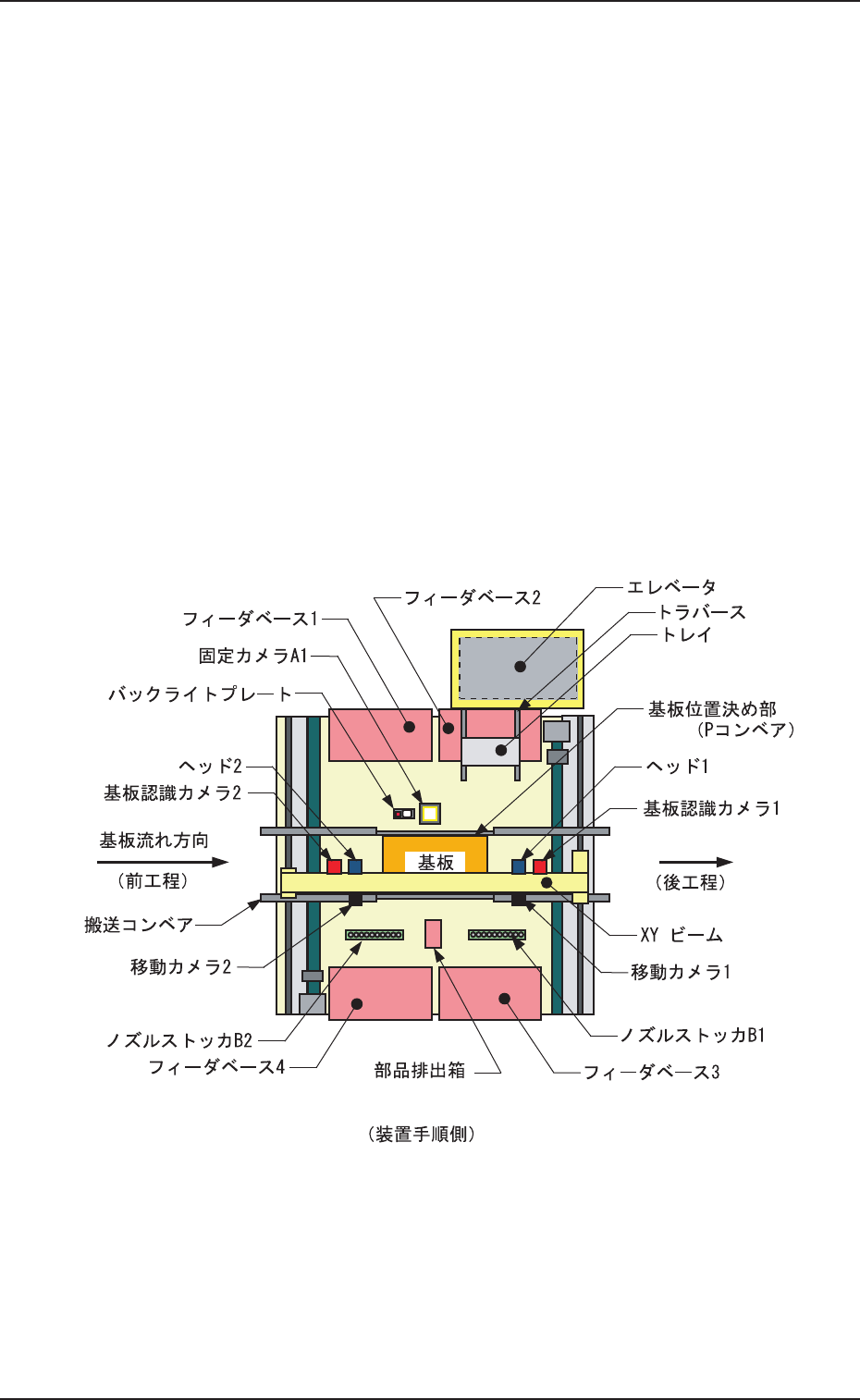
概観図概観図
概観図概観図
概観図
( (
( (
(
基板搬送方向基板搬送方向
基板搬送方向基板搬送方向
基板搬送方向
左左
左左
左
→→
→→
→
右)右)
右)右)
右)
0203-002 1-12
1.3 部品の供給のしくみ
Tg0531-PM-SO
2.2.
2.2.
2.
操作の基礎知識操作の基礎知識
操作の基礎知識操作の基礎知識
操作の基礎知識
2.12.1
2.12.1
2.1
基本操作基本操作
基本操作基本操作
基本操作
詳細は、本体装置取扱説明書“第 1 編 2 節 1.2 タッチスクリーン”
を参照してください。
本装置にはタッチスクリーンはありません。本体装置と兼
用になります。
2.22.2
2.22.2
2.2
操作画面の起動と終了操作画面の起動と終了
操作画面の起動と終了操作画面の起動と終了
操作画面の起動と終了
2.2.12.2.1
2.2.12.2.1
2.2.1
操作画面の起動操作画面の起動
操作画面の起動操作画面の起動
操作画面の起動
詳細は、本体装置取扱説明書“第 1 編 2 節 2 操作画面の起動と終
了”を参照してください。
本装置には [POWER ON] ボタンはありません。本体装置と
兼用になります。
2. 操作の基礎知識
0309-002 1-13
ࡁ࠻
ࡁ࠻