4. SM411F_Introduction(Kor_Ver5).pdf - 第29页
머리말 xv Module 전체 시스템 중 비교적 독립적인 한 부분으로 동작이 가능한 기구적인 단위를 의미합니다 . Spindle 회전하는 작은 축으로 장비의 Head Asse mbly 에 속해 있고 끝에 Nozzle Holder 가 달려있는 구조로 되어 있습 니다 . 매우 정밀하게 구동되는 Ti m i n g B e l t 와 Servo Motor 를 통해 부품의 흡착과 장착을 위한 …
Samsung Component Placer SM411/411N Introduction
xiv
Tape Feeder
릴 형태의 부품케이스에 Roll방식으로 감겨진 부품을 공급하는 기계장치로 피
더베이스에 장착(Installation)됩니다 . 다음 그림과 같이 반드시 피더베이스에
SM피더를 장착 후, 잠금 손잡이를 잠궈야 합니다.
1:
잠금
손잡이
Head Assembly
헤드 어셈블리에 속해 있는 기구물들 또는 공압장치들을 지지하는 Head Body와
Spindle과 구동모터 그리고 부품 및 Fiducial Mark의 형상을 인식하는 Flying
Vision Module과 Fiducial Camera 등으로 구성됩니다.
머리말
xv
Module
전체 시스템 중 비교적 독립적인 한 부분으로 동작이 가능한 기구적인 단위를
의미합니다.
Spindle
회전하는 작은 축으로 장비의 Head Assembly에 속해 있고 끝에 Nozzle Holder가
달려있는 구조로 되어 있습니다. 매우 정밀하게 구동되는 Timing Belt와 Servo
Motor를 통해 부품의 흡착과 장착을 위한 Z축 동작을 수행하고, Micro Step
Motor를 통해 부품 위치의 보정을 위한 R 축 동작을 수행합니다.
미소 칩(Micro Chip)
0
402, 0603 칩 부품과 같이 크기가 아주 작은 칩 부품을 의미합니다.
피치 (Pitch)
Samsung Component Placer SM411/411N Introduction
xvi
일정하게 대응되는 두 지점 간의 간격을 의미합니다.
Timing Belt
모터의 구동 축과 실제 구동되어지는 대상의 구동 축을 연결해 주는 벨트로, 두
축간의 구동비를 고려한 기어비를 가지고 있어 정확한 구동 제어를 가능하게 해
줍니다.
1: Z
축
Timing Belt
2: R
축
Timing Bel
Twin Servo System
Y축의 구동속도를 향상시키기 위해, Y축 구동모터를 양 쪽의 Y축 프레임에 각
기 설치하여, 2개의 Servo Motor를 이용하여 Y축 구동하는 방식을 의미합니다.
그러므로, 반드시 장비의 설치나 이동 후, 반드시 Skew Compensation을 실시해
야 합니다.
AC Servo Motor
AC(교류 )전원을 이용하여 구동되는 모터로 정밀한 구동제어를 위해서 엔코더
를 장착하고 있습니다. 엔코더는 모터 구동 축에 장착이 되어 모터 축의 움직
임
을 펄스형태로 모터의 구동을 제어하는 장치에 보내서 모터에 인가되는 입력과
출력이 같아지도록 보정할 수 있는 정보를 제공합니다.
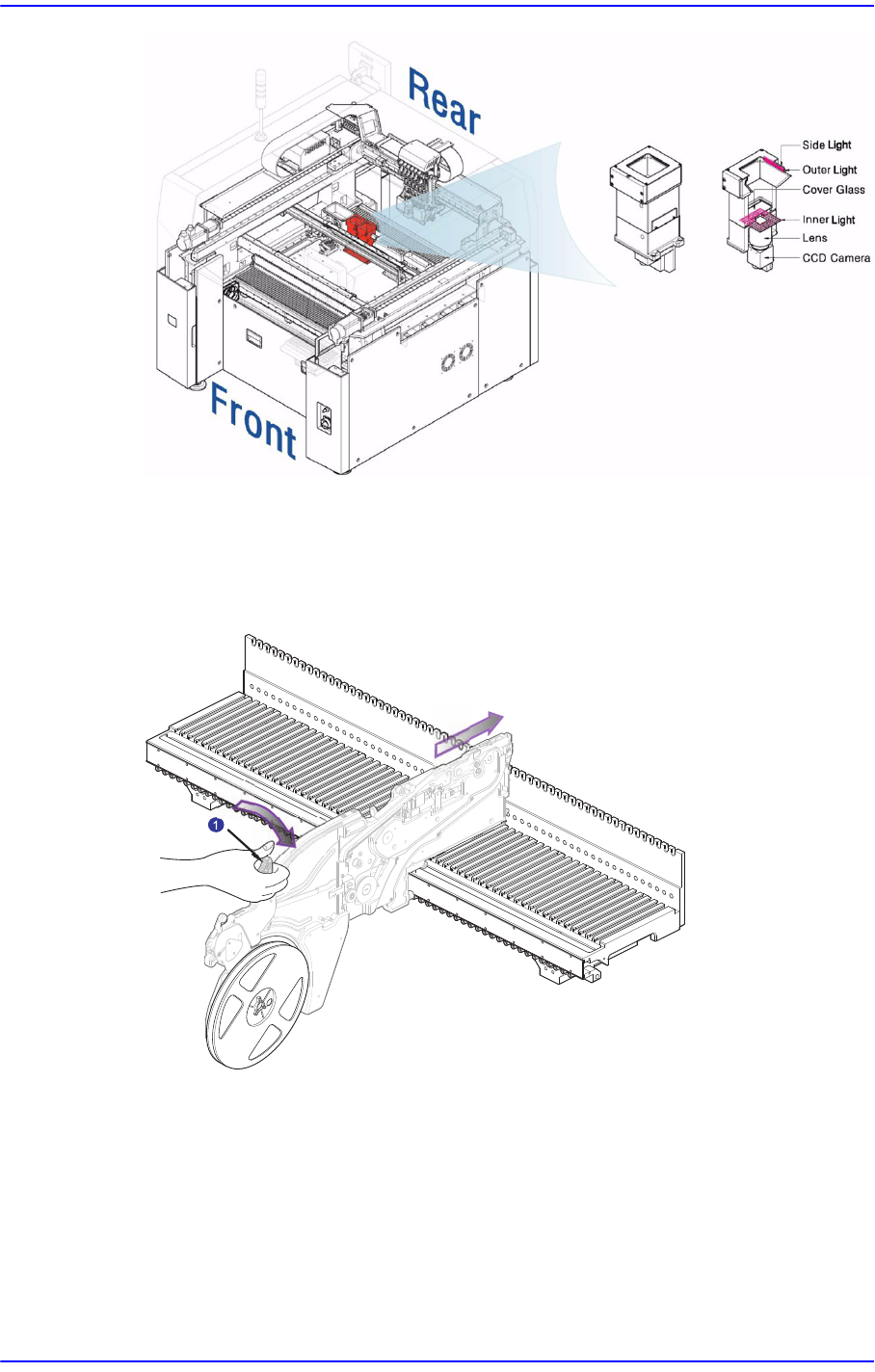
Fiducial Mark
Fiducial Camera를 이용하여 PCB상에 표시 되어진 Fiducial Mark를 인식한 후,
인식한 Fiducial Mark의 정보를 참조하여 PCB상의 장착점을 보정하기 위해 사
용됩니다. 모양은 Circle, Diamond, Rectangle, Rectangle2, Triangle, Cross,
Butterfly, Sharp 등이 있습니다.