4. SM411F_Introduction(Kor_Ver5).pdf - 第31页
머리말 xvii MMI (Man-Machine Interface) 사람과 기계가 함께 일할 수 있는 시스템을 뜻하는 것입니다 . 보다 쉽게 간단한 조작으로 기계에게 명령을 내리는 시스템으로 장비를 제어하는 소프트웨어 프 로그램을 의미합니다 . FOV (Field Of V iew ) SMV ision 창에서 보여지는 영상 이미지를 말하는 것으로 , 일반적으로 영상 이미 지의 가로 (Wi…
Samsung Component Placer SM411/411N Introduction
xvi
일정하게 대응되는 두 지점 간의 간격을 의미합니다.
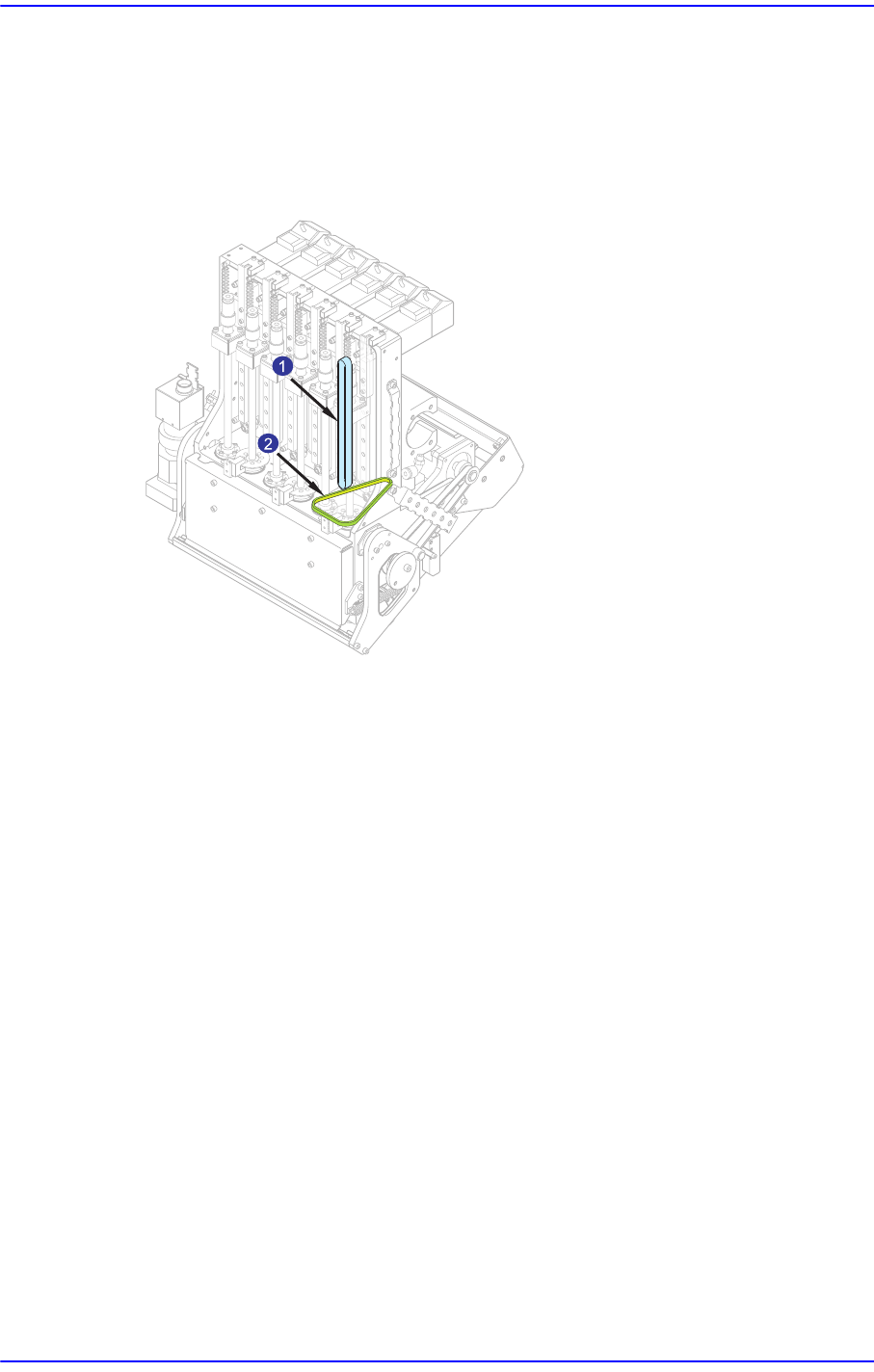
Timing Belt
모터의 구동 축과 실제 구동되어지는 대상의 구동 축을 연결해 주는 벨트로, 두
축간의 구동비를 고려한 기어비를 가지고 있어 정확한 구동 제어를 가능하게 해
줍니다.
1: Z
축
Timing Belt
2: R
축
Timing Bel
Twin Servo System
Y축의 구동속도를 향상시키기 위해, Y축 구동모터를 양 쪽의 Y축 프레임에 각
기 설치하여, 2개의 Servo Motor를 이용하여 Y축 구동하는 방식을 의미합니다.
그러므로, 반드시 장비의 설치나 이동 후, 반드시 Skew Compensation을 실시해
야 합니다.
AC Servo Motor
AC(교류 )전원을 이용하여 구동되는 모터로 정밀한 구동제어를 위해서 엔코더
를 장착하고 있습니다. 엔코더는 모터 구동 축에 장착이 되어 모터 축의 움직
임
을 펄스형태로 모터의 구동을 제어하는 장치에 보내서 모터에 인가되는 입력과
출력이 같아지도록 보정할 수 있는 정보를 제공합니다.
Fiducial Mark
Fiducial Camera를 이용하여 PCB상에 표시 되어진 Fiducial Mark를 인식한 후,
인식한 Fiducial Mark의 정보를 참조하여 PCB상의 장착점을 보정하기 위해 사
용됩니다. 모양은 Circle, Diamond, Rectangle, Rectangle2, Triangle, Cross,
Butterfly, Sharp 등이 있습니다.
머리말
xvii
MMI (Man-Machine Interface)
사람과 기계가 함께 일할 수 있는 시스템을 뜻하는 것입니다 . 보다 쉽게 간단한
조작으로 기계에게 명령을 내리는 시스템으로 장비를 제어하는 소프트웨어 프
로그램을 의미합니다.
FOV (Field Of View)
SMVision 창에서 보여지는 영상 이미지를 말하는 것으로, 일반적으로 영상 이미
지의 가로(Width) 기준으로 FOV를 구분합니다. 예를 들어 ‘FOV 16mm’라 고
한다면, 영상 이미지의 가로(Width)의 실제 길이가 16mm임을 의미합니다.
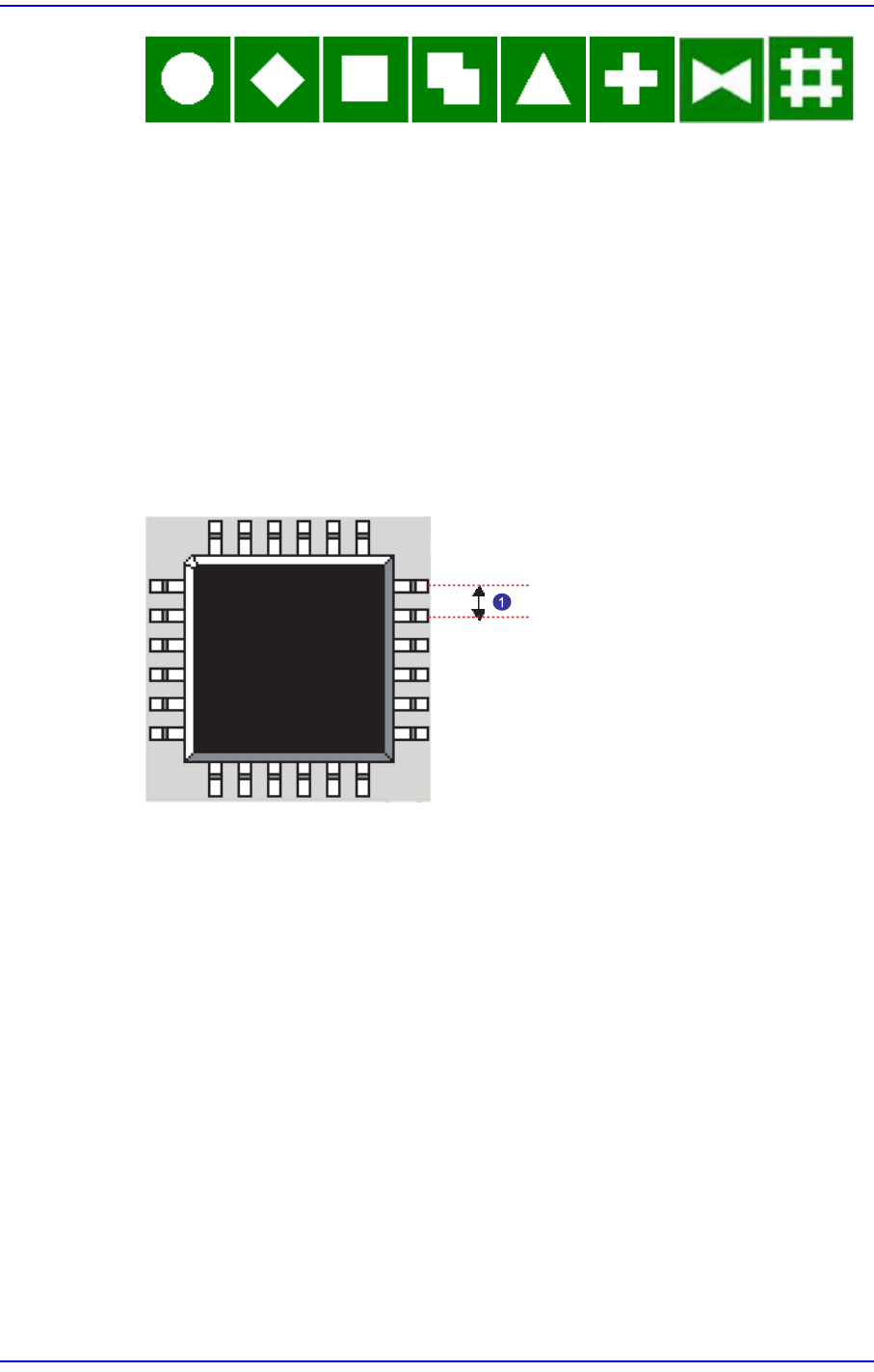
Lead Pitch
리드를 가지는 부품
의 리드간 간격을 의미합니다.
1: Lead Pitch
Stage Vision 인식
Stage Camera를 이용하여 부품의 형상을 인식하는 것을 의미합니다.
Option
장비구입시 사용자가 필요한 경우, 선택하는 사항을 의미합니다 .
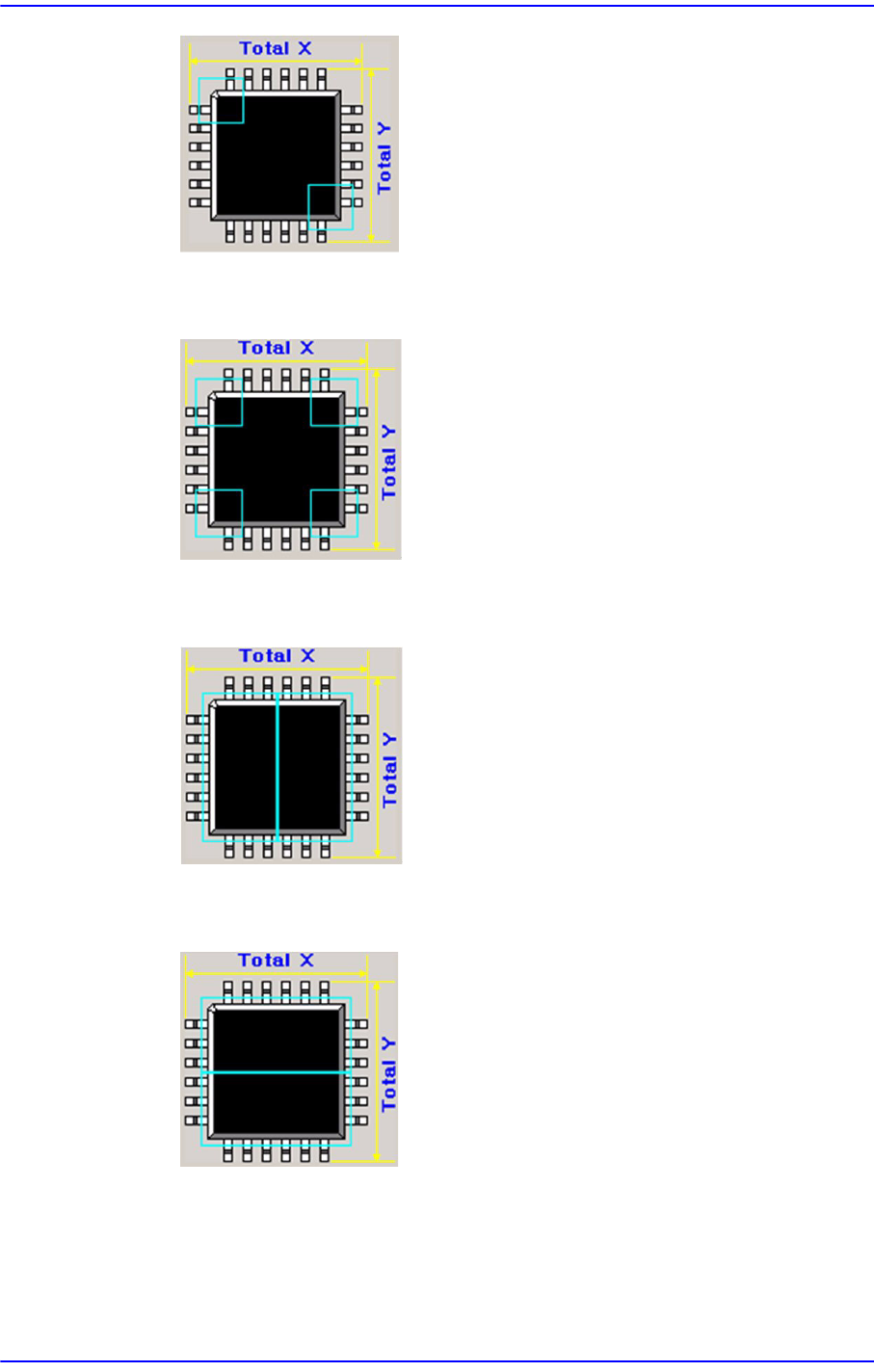
분할인식 (MFOV - Multi Field Of View)
부품 이미지가 Upward Camera(Stage Camera) 가 보여주는 영역을 벗어나면, 한
번에 부품을 인식할 수 없습니다. 이런 문제를 해결하기 위해서 부품 이미지를 2
개 이상으로 나누어 인식하게 되는데, 이것을 ‘분할인식’ 이라 합니다.
MFOV의 종류에는 네 가지가 있는데, 다음과 같습
니다;
Cross
2P: QFP, PLCC 종류에 사용되며 , Cross 방향으로 2번 검사합니다.
Samsung Component Placer SM411/411N Introduction
xviii
Cross 4P: QFP, PLCC 종류에 사용되며, Double Cross 방향으로 4번 검사합니
다.
Linear H: 커넥터 종류에 사용되며, 가로 방향으로 외쪽과 오른쪽 면을 2번 검
사합니다.
Linear V: 커넥터 종류에 사용되며, 세로 방향으로 위쪽과 아래쪽 면을 2번 검
사합니다.
IPC 기준
IPC(국제 전자회로 접속 및 조합학회)에서 규정한 기준을 의미하는 것으로 본
매뉴얼에서는 장착 속도를 측정하는 조건을 의미합니다.
CPH (Component Per Hour)