4. SM411F_Introduction(Kor_Ver5).pdf - 第64页
3-6 Samsung Compon ent Placer SM411/411N Introdu ction 3.3.3. Theta (R) 축 Head 가 부품을 Centering 하는 각도를 표시합니다 . 반 시계 방향의 회전을 +, 시계방 향의 회전을 - 로 합니다 . 1: R 축 회전방향 (+) 2: Z 축 높이 (+) 3.3.4. Conveyor 축 컨베이어 고정 프레임 (Fixed Fra me…
3-5
장비의
명칭
및
구성
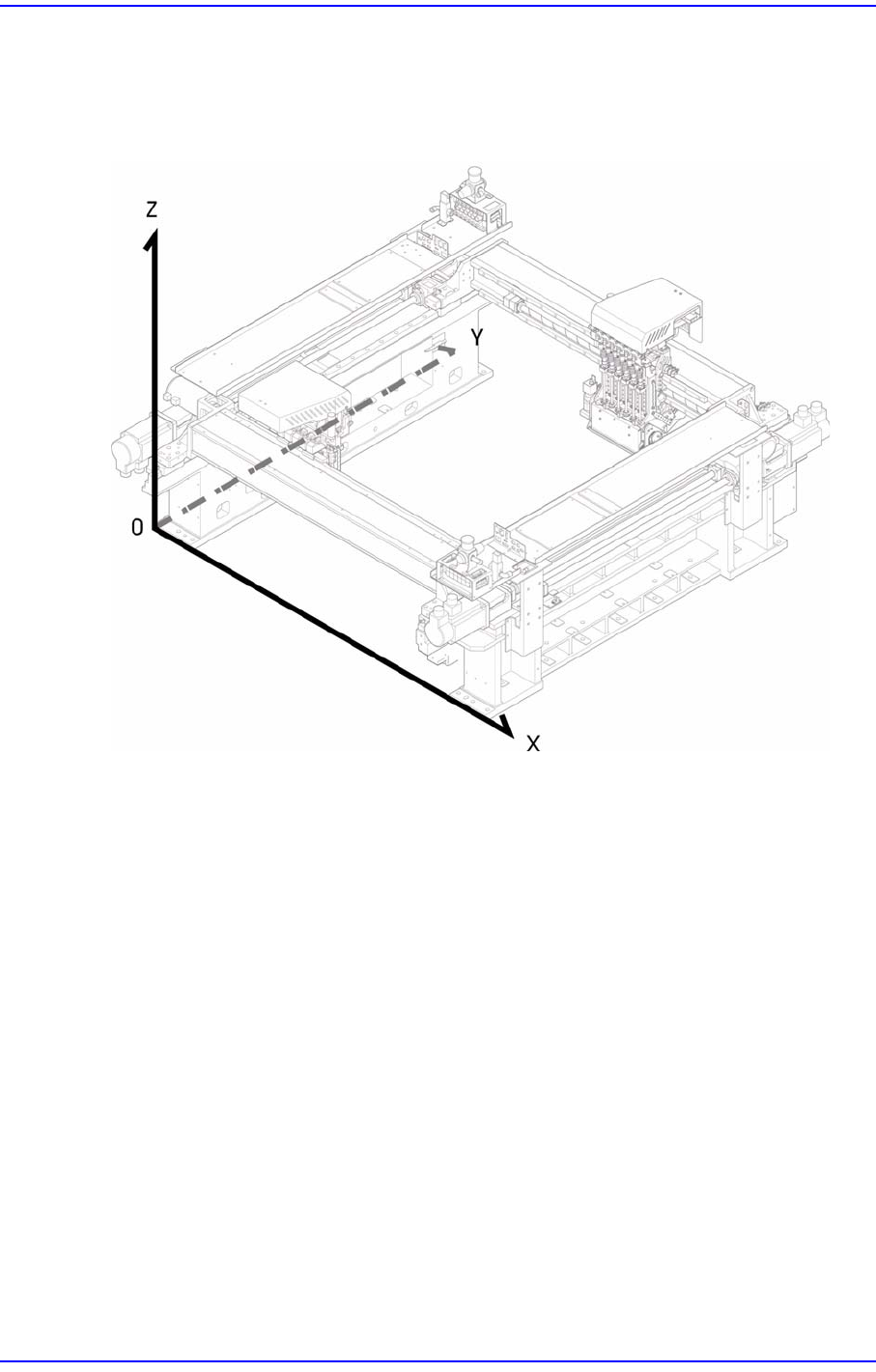
3.3. 좌표계
본 장비의 기본적인 좌표계는 다음의 그림에 나타낸 바와 같습니다.
그림
3.4
장비의
좌표계
3.3.1. X, Y축
Head, ANC, 장착점(Placement Position), 기판 Fiducial Mark의 위치를 표시합니다.
3.3.2. Z 축
Z축은 Head에서 노즐 끝의 위치를 표시하며 고정된 기판의 상면의 위치를 0으로 표
시합니다.
3-6
Samsung Component Placer SM411/411N Introduction
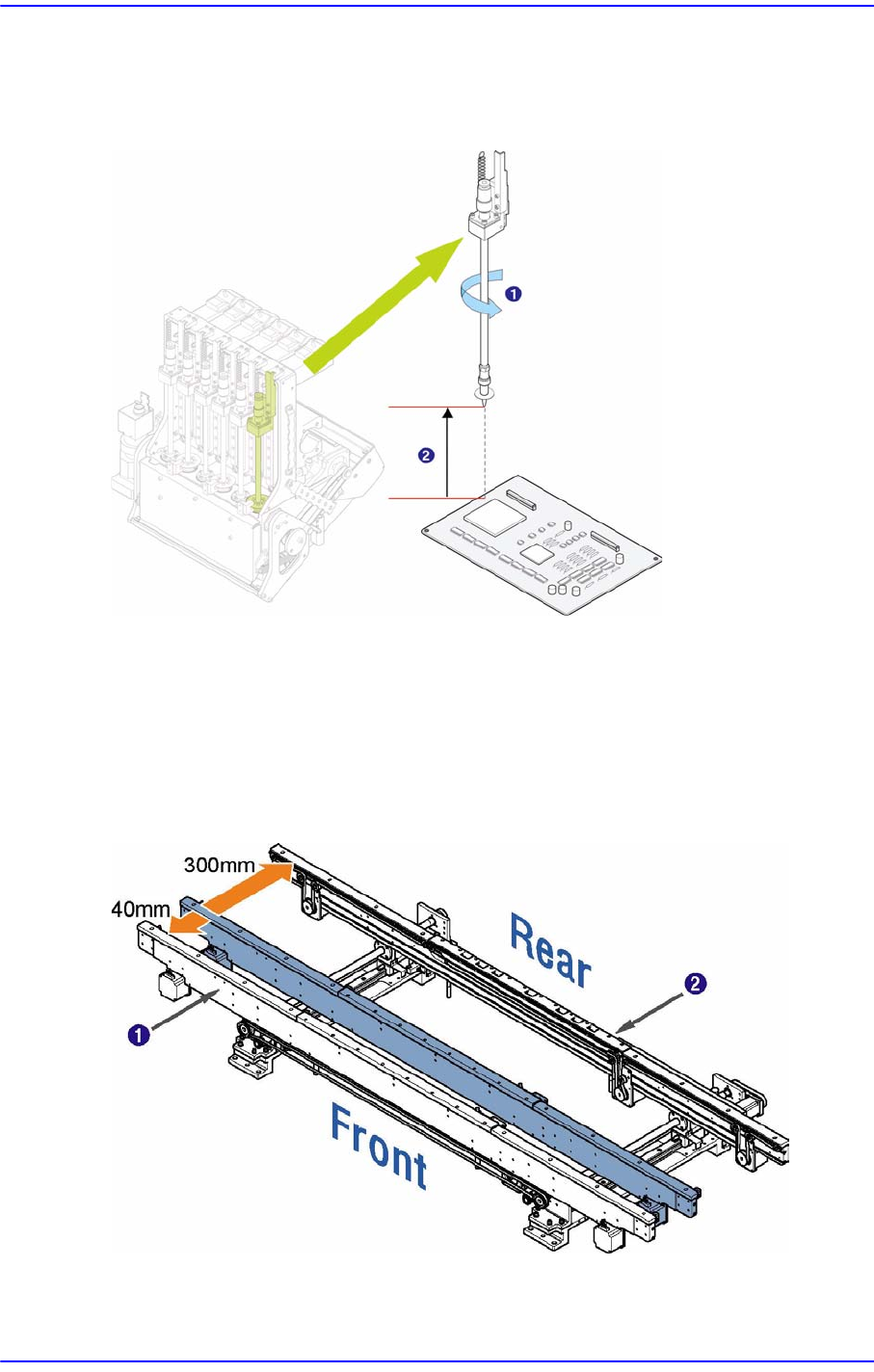
3.3.3. Theta (R) 축
Head가 부품을 Centering 하는 각도를 표시합니다. 반 시계방향의 회전을 +, 시계방
향의 회전을 -로 합니다.
1: R
축
회전방향
(+)
2: Z
축
높이
(+)
3.3.4. Conveyor 축
컨베이어 고정 프레임(Fixed Frame)을 기준으로 컨베이어 이동 프레임(Moving
Frame)을 이동시켜 컨베이어 폭을 조절합니다.
1:
이동
프레임
2:
고정
프레임
4-1
운전
조작부
제4장. 운전 조작부
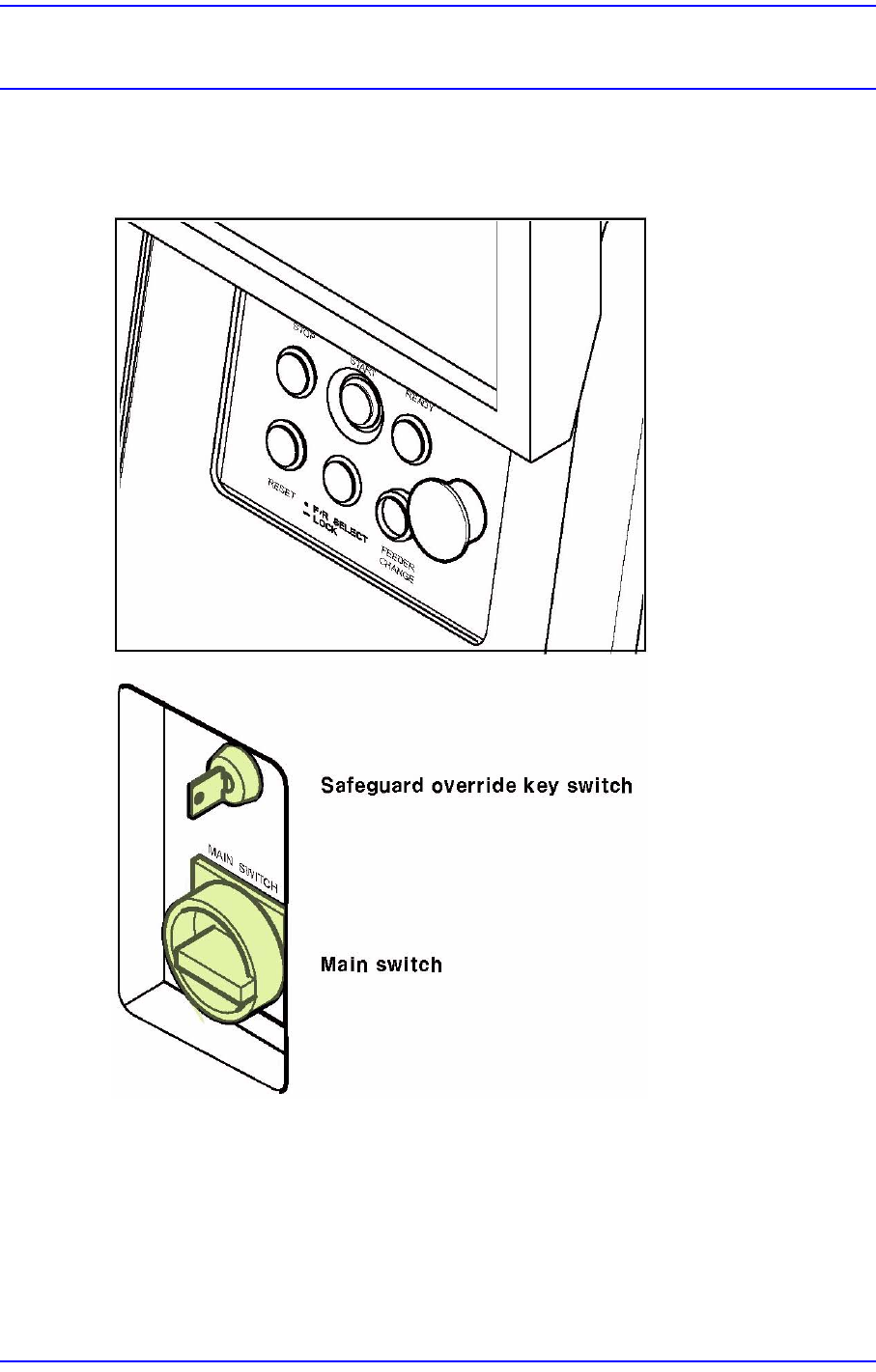
4.1. 운전 패널의 스위치 조작
그림
4.1
운전
패널
운전 패널 상에 있는 스위치의 동작은 다음과 같습니다.
Main 스위치
본 장비 전체 전원을 공급 또는 차단하는 기능을 합니다. 스위치를 돌려 전원을
공급하면 컨트롤러에 전원이 공급됩니다. 프로그래밍 모니터에는 잠시 후 작업
화면이 표시됩니다. 이때 초기 상태에서는 모터 등의 구동부에는 전원이 들어가
지 않습니다.