00193578-02 - 第127页
Návod k obs luze SIPLACE HF 3 Technická data Verze software SR.504.xx Vydá ní 07/2003 CZ 3.10 Rozpoznávací systémy 127 3.10 Rozpoznáva cí sys témy Každá 6- ti segm entová a každá 12-ti se gmentov á hla va Colle ct&Pl…
3 Technická data Návod k obsluze SIPLACE HF
3.9 Portály Verze software SR.504.xx Vydání 07/2003 CZ
126
Osa Y se skládá v podstatě z následujících hlavních skupin: 3
– Lineární pohon s permanentním magnetem (1)
– Vedení (2)
– Lineární odměřovací systém (3)
–Zavěšení kabelu (4)
3
Osa Y je poháněná lineárním motorem. Sekundární díl pohonu se skládá z permanentních ma-
gnetů a je montován na stojan stroje. Primární díl je přišroubován k portálu. 3
3.9.5 Technická data - Y-osa
Pohon Přímo, lineární motor
Max. rychlost 2,5 m/sec.
Dráha pojezdu portálu 1430 mm
Odměřovací systém Lineární kovové měřítko
Délka měřítka 1850 mm
Rozlišení 1 µm
Návod k obsluze SIPLACE HF 3 Technická data
Verze software SR.504.xx Vydání 07/2003 CZ 3.10 Rozpoznávací systémy
127
3.10 Rozpoznávací systémy
Každá 6-ti segmentová a každá 12-ti segmentová hlava Collect&Place má svůj vlastní rozpoz-
návací modul součástek (viz obr. 3.3 - 2
strana 94 a obr. 3.3 - 5 strana 99). Kamera součástek,
stacionární, P&P (typ 22) 50 x 40 pro hlavu TwinHead je připevněna na rámu stroje. 3
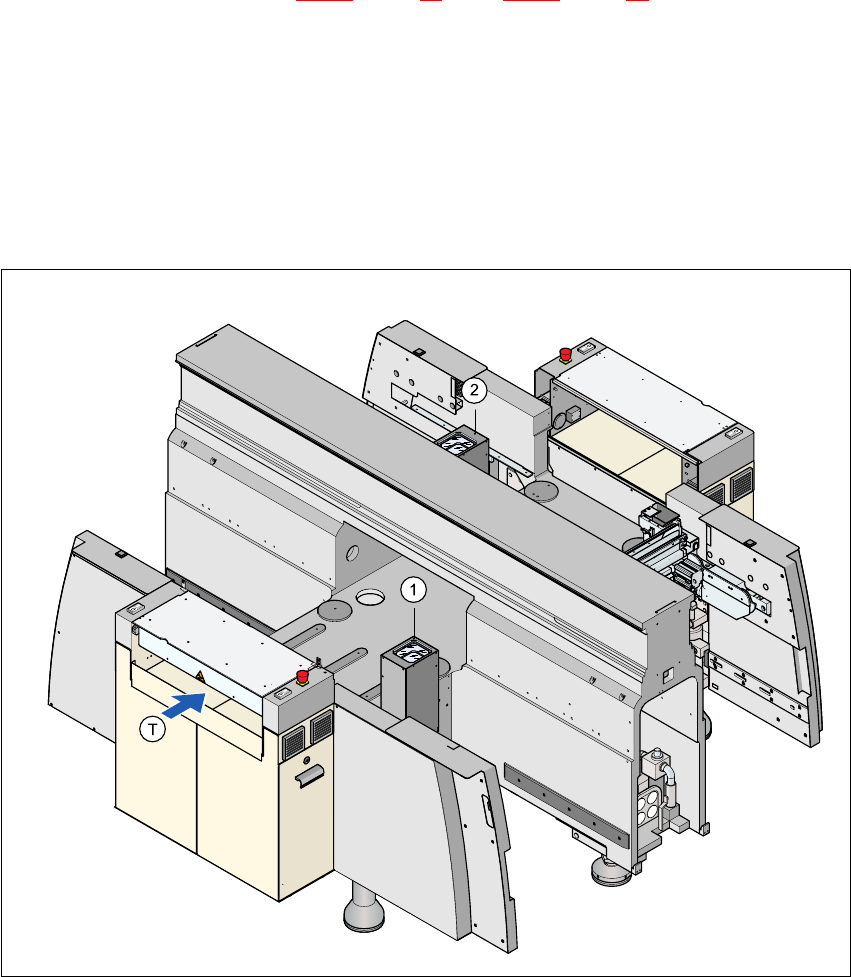
Montážní poloha kamery součástek, stacionární, P&P (typ 22) 50 x 40 3
3
3
Obr. 3.10 - 1 Montážní poloha kamery sou
č
ástek, stacionární, P&P (typ 22) 50 x 40
3
1. Montážní poloha parkoviště 1
2. Montážní poloha parkoviště 3
Hlava TwinHead Kamera součástek, stacionární, P&P (typ 22) 50 x 40
Portál 1 Stanoviště 1
Portál 2 Stanoviště 3
3 Technická data Návod k obsluze SIPLACE HF
3.10 Rozpoznávací systémy Verze software SR.504.xx Vydání 07/2003 CZ
128
VÝSTRAHA - NEBEZPEČÍ HAVÁRIE HLAV 3
Při výměně osazovací hlavy TwinHead hlavou Collect&Place musí být demontovány kamery
součástek, stacionární P&P (typ 22) 50 x 40, a kamera součástek, stacionární (typ 20) 8 x 8
hlavy TwinHead, protože jinak koliduje hlava Collect&Place s tělesy kamer.
S pomocí rozpoznávacího systému součástek je možné následující: 3
–určit přesnou polohu součástky a pipety a
–určit tvar.
Rozpoznávací modul desek zjišt'uje prostřednictvím polohové značky na desce 3
– polohu desky,
– její úhel natočení
–a zpoždění desky.
Kamery desek jsou připevněny na spodní straně portálů. Pomocí polohových značek na poda-
vaèích zjišt'ují exaktní odebírací polohy součástek, což má význam speciálně pro malé
součástky. 3