思泰克SPI介绍-V1.2 - 第18页
无干 扰 时 : 相对零平面定义原理( 3D ) 1. 正常无干扰时的,由于 PCB 板有翘曲,设备会对每个焊盘设定相对 零平面。 2. 设备会自动测得唯一的相对零平面 A ,再计算出焊膏高度和相对零 平面的相对高度差作为焊膏的高度值。 高度 像素 点的 数量 绝对零平面 焊膏高度 相对高度 相对零平面 A 1 3 5 7 9 11 0 50 100 150 200 1 2 3 4 5 6 7 8 9 10 11
0 0 0 0 0 0 0 0 0 0 0
0 0 0 150 150 0 150 140 0 0 0
0 0 0 150 150 160 160 150 150 130 0
0 0 140 150 160 170 160 160 150 140 0
0 130 140 160 170 170 160 160 150 140 0
0 0 150 160 170 180 170 150 150 130 0
0 0 150 160 170 180 180 160 150 140 0
0 0 140 150 160 170 170 160 140 0 0
0 130 140 150 160 160 160 150 0 0 0
0 0 130 140 150 140 140 140 0 0 0
0 0 0 0 0 0 0 0 0 0 0
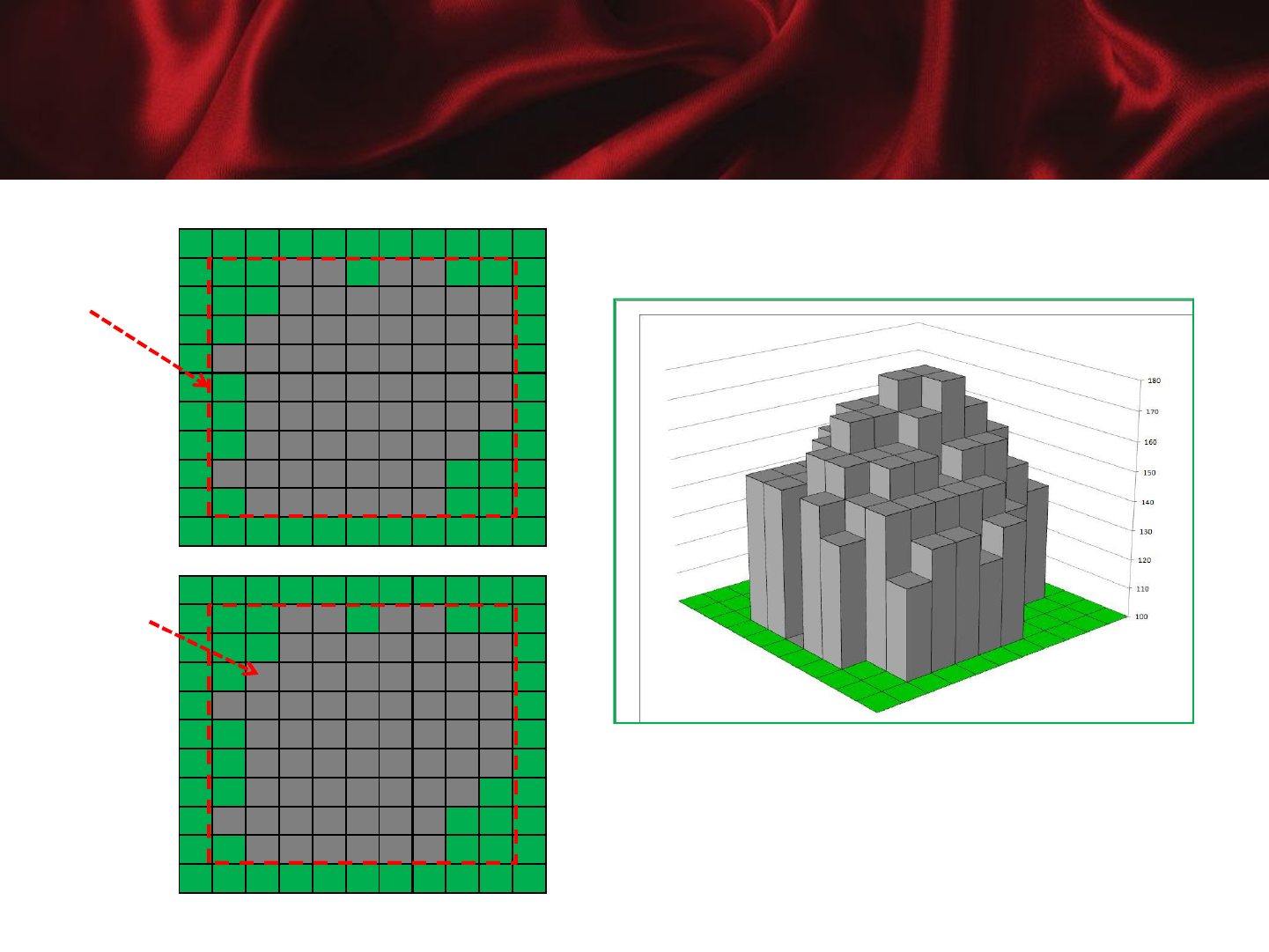
相对零平面定义方法:
测量范围
每个像素
的高度值
通过测量每一个像素范围内的高度值,再乘
以每个像素的表面积,对测量范围内的所有
高度值进行累计加法,并就可以得到非常精
确的体积。
相对零平面定义原理(3D)
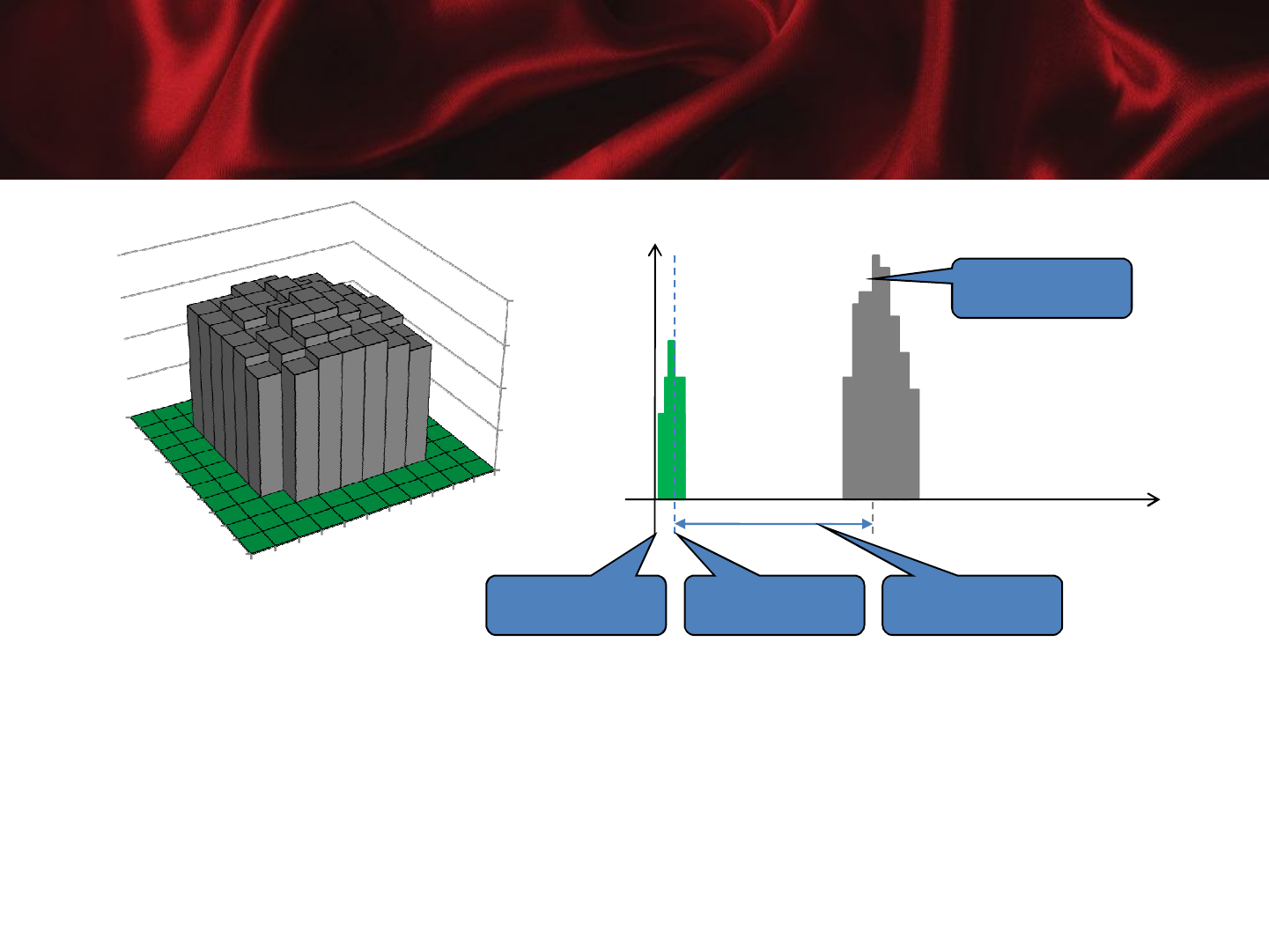
无干扰时:
相对零平面定义原理(3D)
1. 正常无干扰时的,由于PCB板有翘曲,设备会对每个焊盘设定相对
零平面。
2. 设备会自动测得唯一的相对零平面A,再计算出焊膏高度和相对零
平面的相对高度差作为焊膏的高度值。
高度
像素
点的
数量
绝对零平面
焊膏高度
相对高度相对零平面
A
1
3
5
7
9
11
0
50
100
150
200
1
2
3
4
5
6
7
8
9
10
11
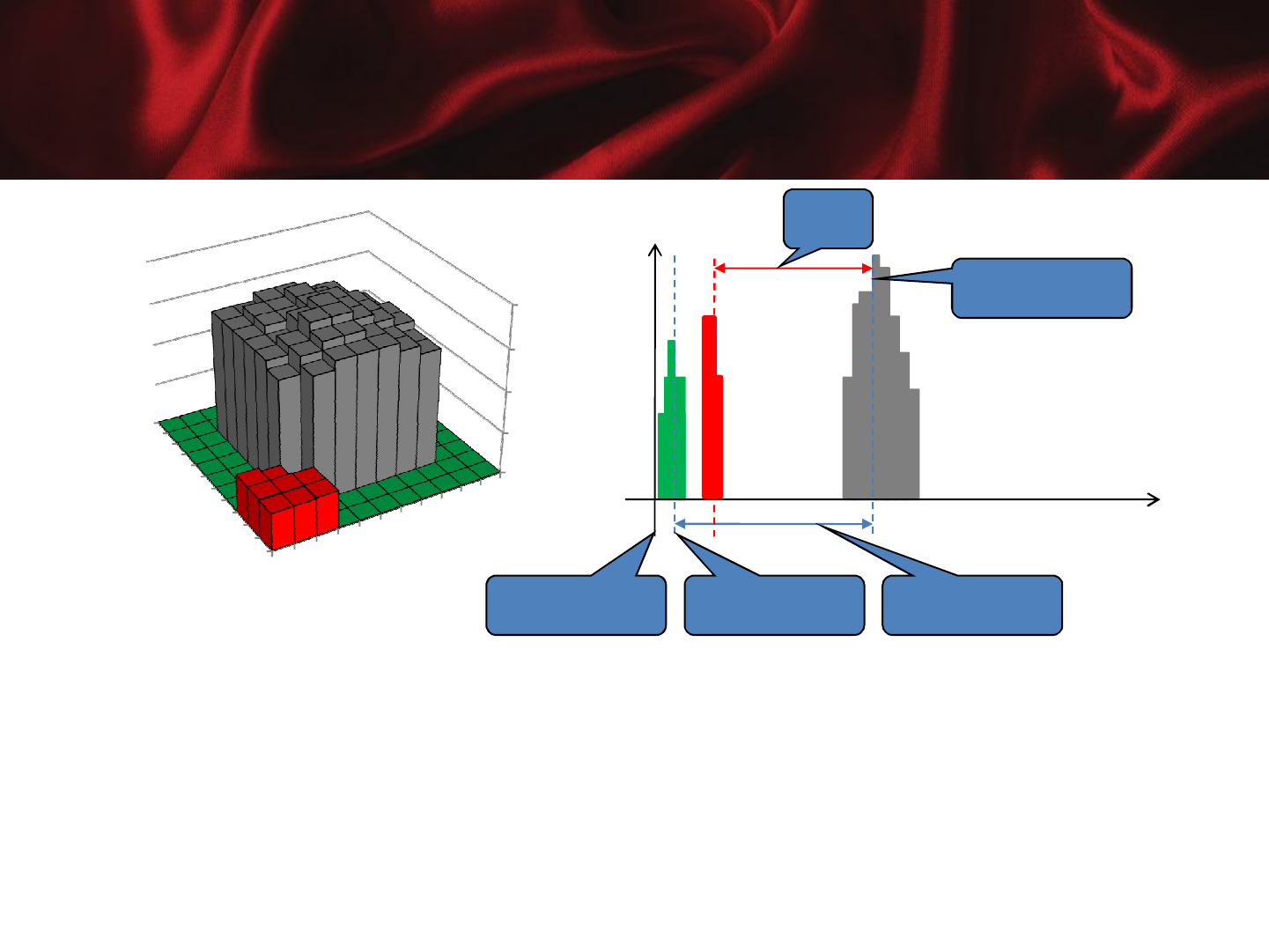
干扰对相对零平面定义的影响(3D)
高度
像素
点的
数量
绝对零平面
焊膏高度
相对高度相对零平面
A B
干扰
有干扰时:
1. 当有干扰时的,如白线,助焊剂等设备还是要对每个焊盘设定相对
零平面。
2. 设备会自动测得两个或两个以上的相对零平面A和B,计算机无法自
动判断哪一个相对零平面是正确的,所以无法正确处理。
1
4
7
10
0
50
100
150
200
1
2
3
4
5
6
7
8
9
10
11