MSR服务手册.pdf - 第53页
MSR 服务手册 4.3 Robot 头部:驱动部 D14SCC-W 1-B00-A0 4.3-2 4.3.2 吸着摇动调整 吸着摇动调整 吸着摇动调整 吸着摇动调整 相关 Unit No. 1046714 00AB 吸着 摇动 的 调 整 止 动 器汽缸的 间 隙的 调 整 4.3.1 吸着、 贴 装滑 动块阶 差 的 调 整 ► 吸着摇动的调整 吸着摇动的调整 吸着摇动的调整 吸着摇动的调整 1. 打开电 源,进行返回 原点。 2.…
MSR
服务手册
4.3 Robot 头部:驱动部
4.3-1 D14SCC-W1-B00-A0
4.3 Robot 头部:驱动部
头部:驱动部头部:驱动部
头部:驱动部
Sentence No. D14SCC-W1-B00-A0
4.3.1 吸着、贴装滑动块
吸着、贴装滑动块吸着、贴装滑动块
吸着、贴装滑动块级差
级差级差
级差的调整
的调整的调整
的调整
相关Unit No.
104671400AB
**
无选项
**
吸着摇动调整
吸着、贴装滑动块级差的
调整
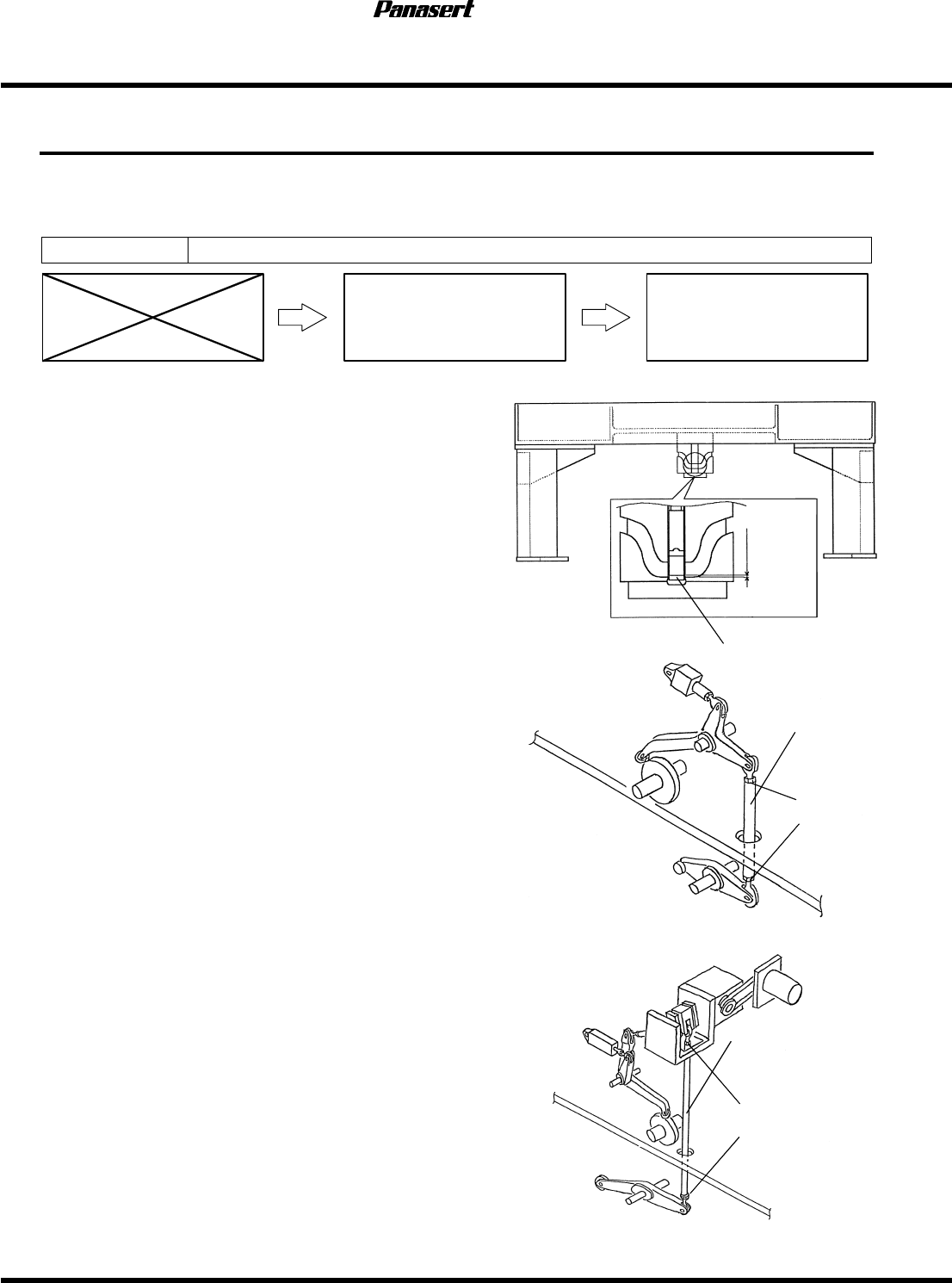
►贴装滑动块级差的调整
贴装滑动块级差的调整贴装滑动块级差的调整
贴装滑动块级差的调整
1. 打开电源,进行返回原点。
2. 将“HEAD SERVO”(头伺服)置于OFF。
3. 转动手轮使循环计时器为125°。
4. 确认圆筒凸轮与贴装滑动块的搭接部位没有级差。
5. 有级差时请旋松杆头的锁紧螺母,旋转轴杆加以调
整。
=提示
提示提示
提示=
请不要将锁紧螺母紧固过度。
用扳手转动轴杆可进行微调。
6. 再次确认没有级差。
7. 紧固锁紧螺母固定轴杆。
►吸着滑动块级差的调整
吸着滑动块级差的调整吸着滑动块级差的调整
吸着滑动块级差的调整
1. 转动手轮使循环计时器位于80°。
2. 确认圆筒凸轮与贴装滑动块的搭接部位没有级差。
3. 有级差时请旋松杆头的锁紧螺母,旋转轴杆加以调整。
=提示
提示提示
提示=
请不要将锁紧螺母过度紧固。
用扳手转动轴杆可进行微调。
4. 再次确认没有级差。
5. 紧固锁紧螺母固定轴杆。
滑动块部
轴杆
锁紧螺母
贴装部
吸着部
无级差
轴杆
锁紧螺母
MSR
服务手册
4.3 Robot 头部:驱动部
D14SCC-W1-B00-A0 4.3-2
4.3.2 吸着摇动调整
吸着摇动调整吸着摇动调整
吸着摇动调整
相关Unit No.
104671400AB
吸着摇动的调整
止动器汽缸的间隙的调整
4.3.1
吸着、贴装滑动块阶
差
的
调
整
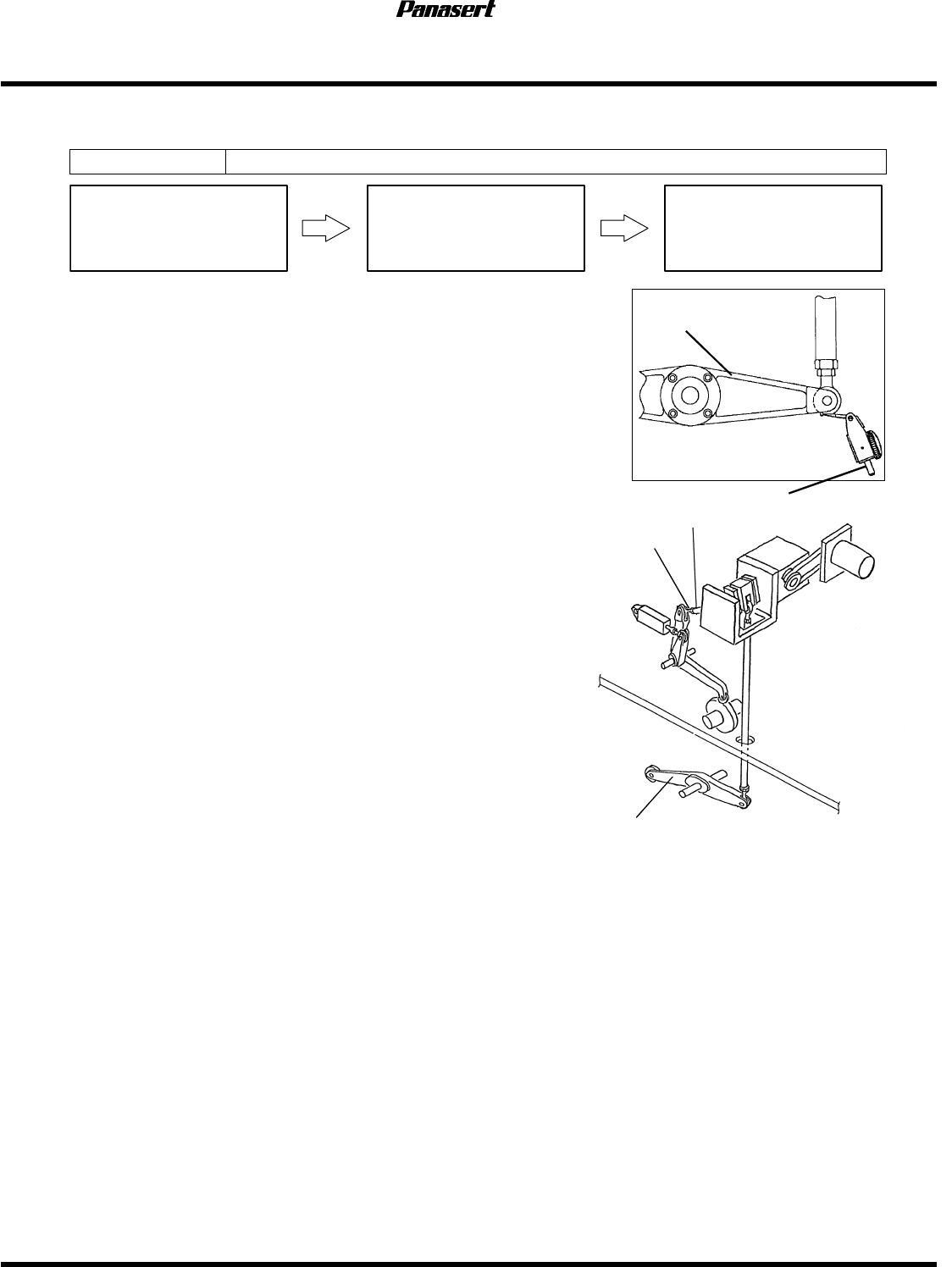
►吸着摇动的调整
吸着摇动的调整吸着摇动的调整
吸着摇动的调整
1. 打开电源,进行返回原点。
2. 将CT置于80°。
3. 将“HEAD SERVO”(头伺服)置于OFF。
4. 将百分表设置于吸着侧滑动块控制杆的下面。
5. 在摇动控制杆上下动作时测定百分表的摆动。
=规格值
规格值规格值
规格值=
间隙
间隙间隙
间隙 : 0.03 mm以下
以下以下
以下
6. 在规格值以外时旋松轴杆的锁紧螺母,旋转轴杆进行调整。
7. 再次确认摇动控制杆的摆动。
8. 旋紧锁紧螺母固定轴杆。
吸着侧滑动块控制杆
轴
杆
锁紧
螺母
吸着侧滑动块控制杆
百分表
MSR
服务手册
4.4 基板搬送:上载导轨·下载导轨
4.4-1 D14SCC-W3-000-A0
4.4 基板搬送:上载导轨·下载导轨
基板搬送:上载导轨·下载导轨基板搬送:上载导轨·下载导轨
基板搬送:上载导轨·下载导轨
Sentence No. D14SCC-W3-000-A0
4.4.1 搬送导轨间的间隙的调整
搬送导轨间的间隙的调整搬送导轨间的间隙的调整
搬送导轨间的间隙的调整
相关Unit No.
搬送导轨间的间隙的调整
=准备
准备准备
准备=
1. 塞尺
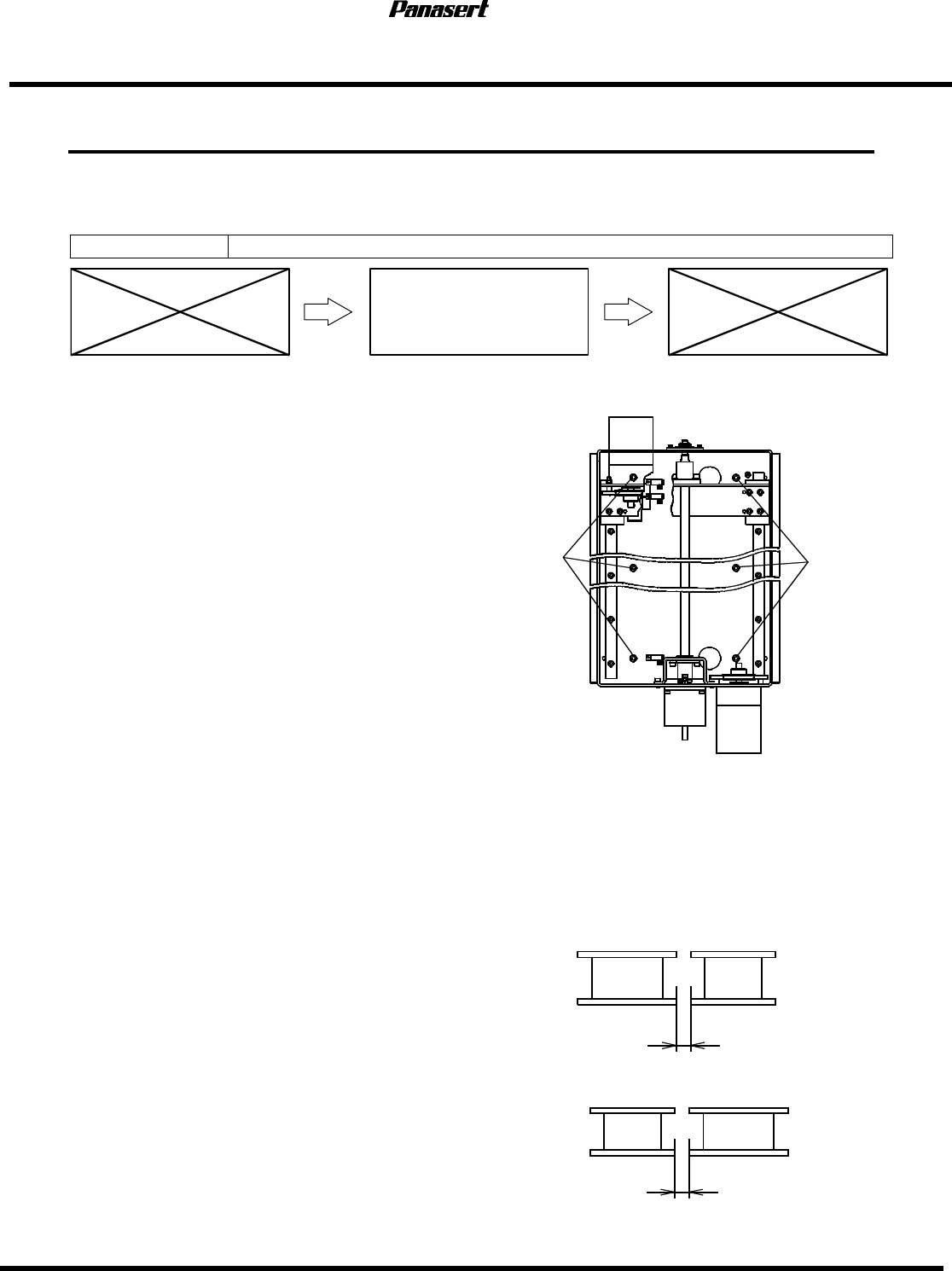
►搬送导轨间的间隙的调整
搬送导轨间的间隙的调整搬送导轨间的间隙的调整
搬送导轨间的间隙的调整
1. 打开电源,进行返回原点。
2. 将副操作盘的“XY TABLE LOADER POS MOVE”
(XY工作台搬送高度位置移动)置于ON。
=确认
确认确认
确认=
请确认XY工作台的上升。
3. 确认XY工作台与上载导轨、下载导轨之间的导轨间隙。
4. 在规格值之外时,旋松上载导轨装置螺栓(6根)、
下载导轨装置螺栓(6根)。
5. 手动操作上载导轨、下载导轨,调整间隙。
6. 旋紧上载导轨装置螺栓、下载导轨装置螺栓。
(上
载导轨
、下
载导轨驱动
部)
(
间
隙)
XY
工作台
上载导轨
下
载导轨
上载导轨装置螺栓
XY
工作台
2.0
+0
-1.0
2.0
+0
-1.0
上载导轨装置螺栓
㎜
㎜