DGS-程序手册_04BFC.pdf - 第815页
程序手册 6.5 添加新的元件 EJS9AC-MB-06P-18 Page 6-109 项目 说明 ‘ 托盘 ’ ‘ 升降速度 ’ 设定托盘升降机的速度。有以下三种 : • [ 低速 ] • [ 中速 ] • [ 高速 ] ‘ 拔出速度 ’ 设定托盘的拔出速度。有以下三种 : • [ 低速 ] • [ 中速 ] • [ 高速 ] ‘ 托盘位置识别 ’ 设定是否进行托盘位置的识别。 ‘ 杆管式送料器 ’ ‘ 送料器驱动速度 ’ 设定棒式供…
程序手册
6.5
添加新的元件
Page 6-108 EJS9AC-MB-06P-18
项目
说明
‘
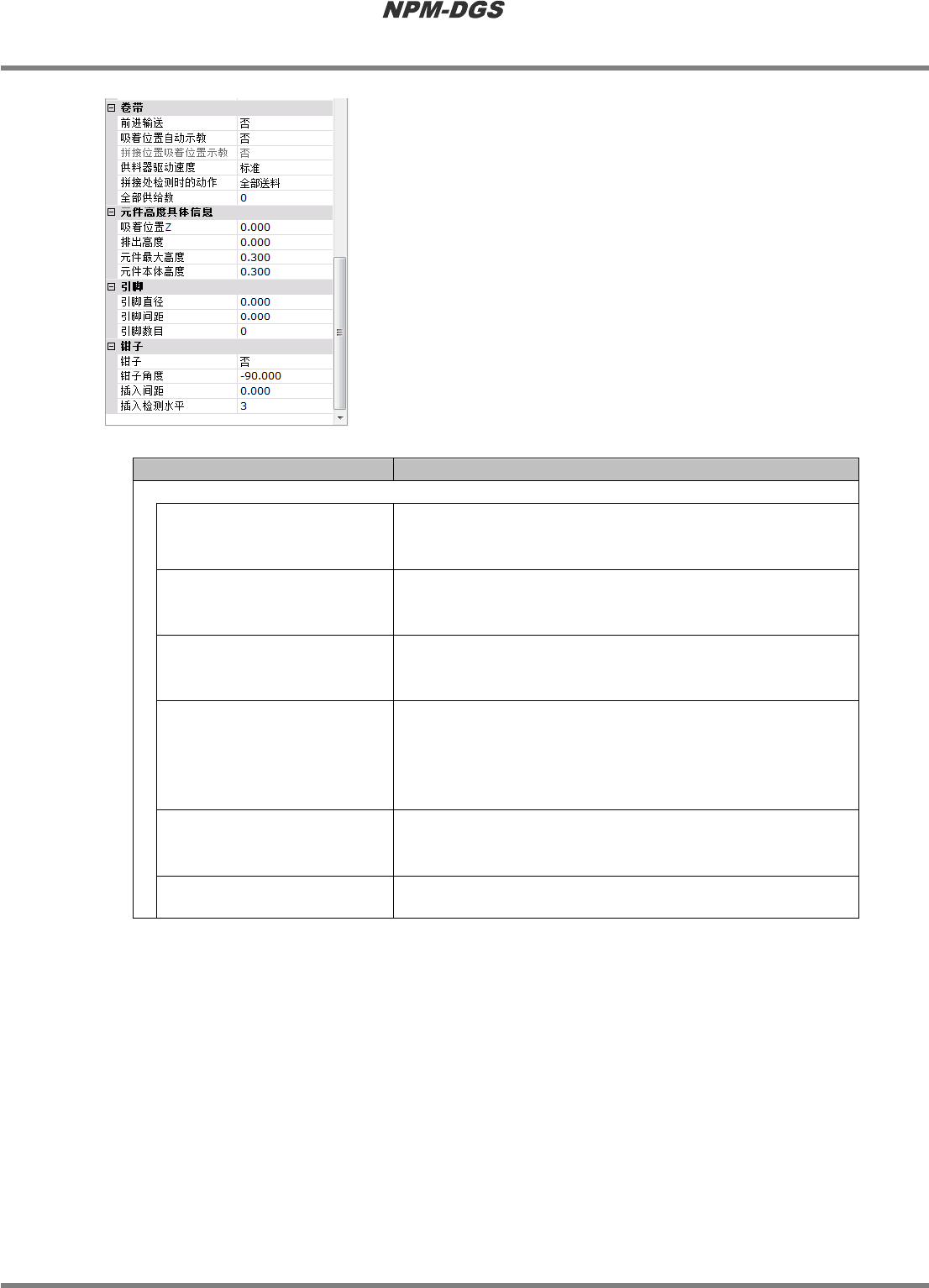
卷带
’
‘
前进输送
’
设定在吸附动作开始前是否进给编带。有以下两种
:
• [
否
]
• [
是
]
‘
吸着位置自动示教
’
设定是否进行吸着位置的自动示教。有以下两种
:
• [
否
]
• [
是
]
‘
拼接位置吸着位置示教
’
设定是否拼接位置吸着位置示教。有以下两种
:
• [
否
]
• [
是
]
‘
供料器驱动速度
’
设定供料器的进给速度。有以下四种
:
• [
标准
]
• [
高速
]
• [
中速
]
• [
低速
]
‘
拼接处检测时的动作
’
设定检测接缝时的动作。有以下两种
:
• [
全部送料
]
• [
排除错误
]
‘
全部供给数
’
设定整体的供给数量。
0 ~ 300
Parts060603S-20C00
程序手册
6.5
添加新的元件
EJS9AC-MB-06P-18 Page 6-109
项目
说明
‘
托盘
’
‘
升降速度
’
设定托盘升降机的速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
拔出速度
’
设定托盘的拔出速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
托盘位置识别
’
设定是否进行托盘位置的识别。
‘
杆管式送料器
’
‘
送料器驱动速度
’
设定棒式供料器的供给速度。速度分为下述三种
:
• [
标准
]
• [
中速
]
• [
低速
]
‘
卷带
’
‘
前进输送
’
设定在开始吸附动作之前是否供给编带。有以下两种
:
• [
否
]
• [
是
]
‘
供料器驱动速度
’
设定径向编带供料器的进给速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
径向基准面高度
’
设定编带的进给孔和元件与基板相接触面之间的距离。
‘
元件高度具体信息
’
‘
吸着位置
Z’
请输入吸附表面的高度。吸附面比元件表面凹进去时,请输入正
值。
0 ~
芯片尺寸
T
‘
排出高度
’
请输入贴装表面的高度。
贴装面比元件表面突出时,请输入正
值。
0 ~ 21
‘
元件最大高度
’
设定从引脚下端起到元件上端为止的元件合计高度。
‘
元件本体高度
’
设定在插入状态下,从基板表面到元件上端为止的高度。
程序手册
6.5
添加新的元件
Page 6-110 EJS9AC-MB-06P-18
项目
说明
‘
引脚
’
‘
引脚直径
’
设定插入引脚的外径。
‘
引脚间距
’
针对插入引脚按照一列且等间隔排列的部分,设定各个引脚的间
隔。
‘
引脚数目
’
针对插入引脚按照一列且等间隔排列的部分,设定各个引脚的数
量。
‘
钳子
’
‘
钳子
’
设定砧座单元的动作。
有以下三种
:
• [
否
]:
不执行动作。
• [
钳子
]:
在基板下方执行切断、弯曲引脚的操作。
• [
基板支撑
]:
在基板下方支撑基板。不进行切断、弯曲引脚的
操作。
‘
钳子角度
’
以插入头的角度为基准,设定将砧座单元倾斜到什么角度。
‘
插入间距
’
设定位于最外侧的两根引脚的间隔。
当设备附带砧座单元时,针对这个引脚进行切断、弯曲的操作。
‘
插入检测水平
’
使用钳子时,在
0
~
7
的范围内设定插入检测水平的范围。当引
脚较软时设定小的值,引脚较硬时设定大的值。