JM-10_EPU使用说明书 - 第121页
EPU 使用说明书 第 4 章 制作生产程序 4- 75 6) MTS ● MTS 速度:可指定 MTS 的托盘拉出速 度。 7) 识别中心偏 移量 图像定中心 是通过将吸取中 心位置 ( 通 常是元件中心位 置 ) 移动到 VC S 的中心位置来进行。 但像 MCM(M ulti Chip M odule) 之类的元件, 因不能吸 取元件中心, 如果 超出 VCS 视角范围 时,将不能进行图 像定中心。此时,可通过 输入如下图的偏移值…
EPU 使用说明书 第 4 章 制作生产程序
4-74
灵活
2
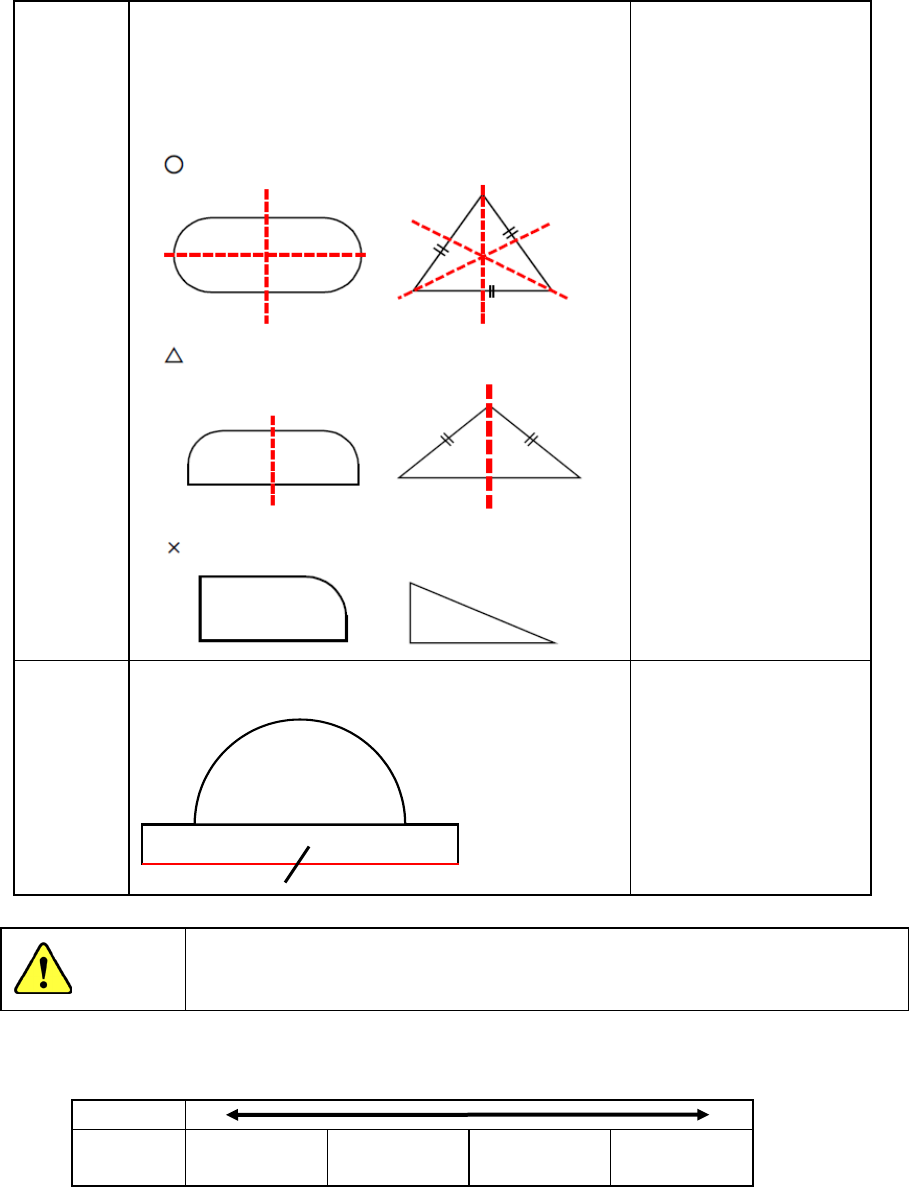
根据测量结果,检出元件的左右对称轴,从该轴取得
元件的中心坐标、及角度偏差量,进行贴片校正。元
件尺寸,根据上述计算测量出的角度偏差量,以实际
的元件角度 0°为基础,把测量结果中最大的幅度判断
为 X、Y 。
请仅使用贴片角度
0
度
180 度上下无区别的
LED 元件等。
如果元件存在多个对称
轴,因能取得元件的准
确的中心坐标,此形状
会非常有效(例 :左 图「 ○
」
元件)。
对称轴为 1 个时,由于
无法取得元件的 Y 方向
的准确的中心坐标,有
时会发生贴片偏移(例:
左 图「 △ 」元 件 )
。但 是 ,
由于此偏移量有再现
性,输入贴片偏移量的
方法,有时也可以使用。
如果元件没有对称性,
此形状无效(例:左图
「×」元件)。
灵活
3
用元件的最小幅度附近的数据计算
XY
的幅度、位移
量。从元件的 X 方向的 1 边的倾斜取得角度。
异形元件
可识别许多异形元件,
但如果元件的上下带圆
形的,角度偏移值会变
得不稳定。(由于取得
角度时只使用 1 个边)
元件形状的初始值根据元件种类有既定值。一般情况下,如果改变算法会导
致错误发生率增大。因此除特殊情况外,请绝对不要变更。
※ 关于插入元件的激光识别用元件形状的指定
如果是插入元件,请根据下表的优先度选定元件形状。
优先度
高
低
元件形状 无缺角
有缺角
灵活
灵活2
灵活3
※ 其他的元件形状会造成贴片错误,故请勿使用。
※ 因「用途栏」所述的原因,灵活2、灵活3可能出现贴片偏移,故除了特殊情况外请勿使
用。
注意
EPU 使用说明书 第 4 章 制作生产程序
4-75
6)MTS
●MTS 速度:可指定 MTS 的托盘拉出速度。
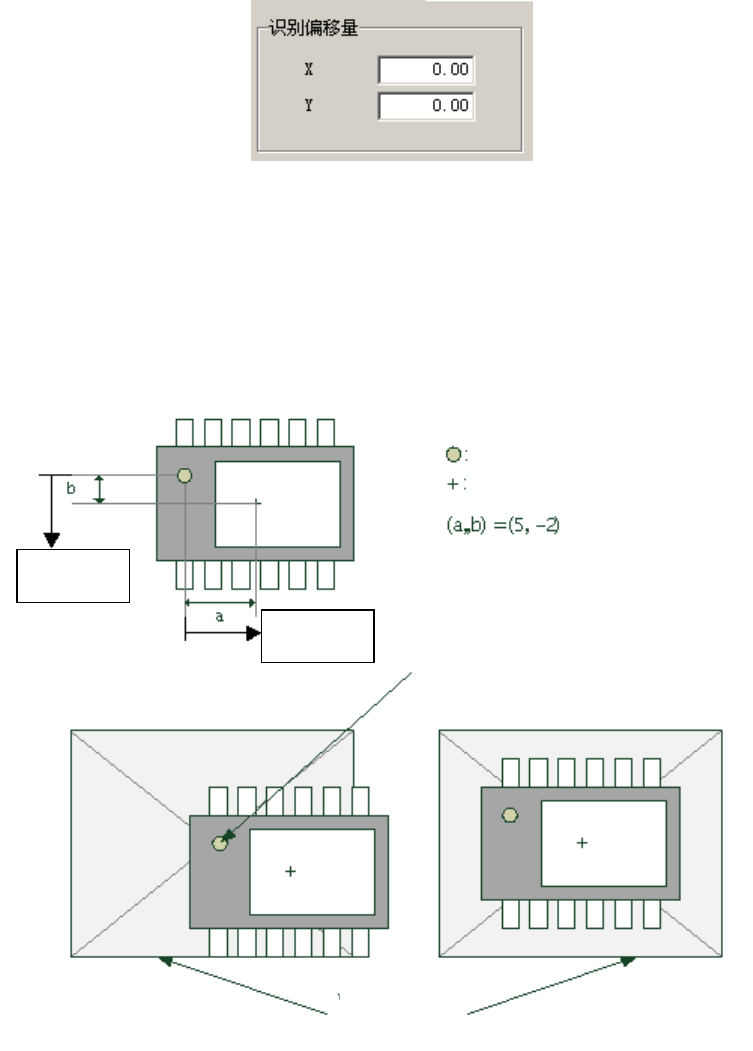
7)识别中心偏移量
图像定中心是通过将吸取中心位置(通常是元件中心位置)移动到VCS的中心位置来进行。
但像MCM(Multi Chip Module)之类的元件,因不能吸取元件中心,如果超出VCS视角范围
时,将不能进行图像定中心。此时,可通过输入如下图的偏移值(a、b),使之正常进行识
别。
输入示例
识别中心偏移(
0,0)时
吸取中心位置
= VCS
中心位置
识别中心偏移(
5,-2)时
吸取中心位置
元件中心位置
-Y 方向
+X 方向
VCS
的视野
(俯视图)
EPU 使用说明书 第 4 章 制作生产程序
4-76
8)吸取真空时间调整
指定是否进行吸取真空时间的调整。
调整设定为「执行」时,需以 ms 为单位输入“开始时间”、“开始校正值”、“稳定时间”的调
整时间。
若使用夹持吸嘴时,吸取动作时不会进行调整。
※根据「开始时间 + 开始校正值」的值,将进行以下动作。
正值:在将要达到吸取高度之前开始真空。
负值:到达吸取高度后立即开始真空。
9)贴片真空时间调整
指定是否进行贴片真空时间的调整。
调整设定为「执行」时,需以 ms 为单位,输入“真空停止时间”、“真空停止校正值”、“吹
气开始时间”、“吹气持续时间”、“真空等待结束时间”的调整时间。
若使用夹持吸嘴时,贴片动作时不会进行调整。
※根据「真空停止时间 + 真空停止校正值」的值,将进行以下动作。
正值:在将要到达贴片高度之前停止真空。
负值:在到达贴片高度后立即停止真空。
10) 检测到元件后的(吸取)等待时间
设定检测到元件后直至开始吸取的等待时间。
(由于震动式的供料器,在元件检测传感器从 OFF 变为 ON 的瞬间,元件有时尚未到达吸
取位置)
本项目可在包装方式为「管状」或「INS
散装」时设定。