JM-10_EPU使用说明书 - 第127页
EPU 使用说明书 第 4 章 制作生产程序 4- 81 执行(无 HMS 的确认 ) 到达缺失 部位后使用 H MS 进行元件有无确认, 如果 没有元件则 进行送料, 进行 吸取动作 。 如果使用 HMS 确认连续 3 次无元件, 之后将不进行 HMS 确认动作, 直接进行吸取 动作。 元件 连续 数 有元件 : 设置有元件状态连续 的数量。(下 图所示 为 6 ) 无元件 : 设置 无 元件状态连续的数 量。(下 图所示为 2 ) …
EPU 使用说明书 第 4 章 制作生产程序
4-80
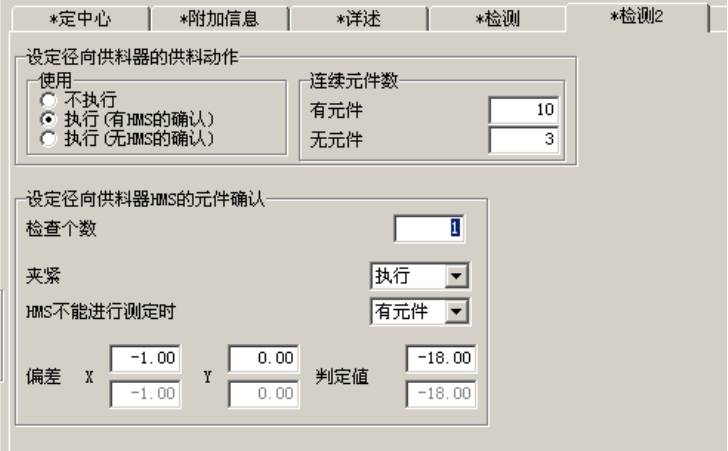
(7) 检查 2
对“设定径向供料器的供料动作”、“设定径向供料器 HMS 的元件确认”进行相关设定。
图
4-3-5-2-13
元件数据(检查
2
)
1) 设定径向供料器的供料动作
此功能是对于会定期出现缺失状态的带式元件到达了缺失部位时,不进行吸取动作,通过
HMS 判定元件有无,元件「无」时进行送料的功能。
仅在元件类型为「插入元件」并且包装方式为「INS 带式」,选择「MRF-S」「 MRF-L」类
型时,才能设定此项。
不执行
对于没有缺失部位的带式元件、不定期存在缺失部位的元件,请选择不执行。
执行(有 HMS 的确认)
到达缺失部位后使用 HMS 进行元件有无确认,如果没有元件则进行送料,进行吸取动作。

EPU 使用说明书 第 4 章 制作生产程序
4-81
执行(无 HMS 的确认)
到达缺失部位后使用 HMS 进行元件有无确认,如果没有元件则进行送料,进行吸取动作。
如果使用 HMS 确认连续 3 次无元件,之后将不进行 HMS 确认动作,直接进行吸取动作。
元件连续数
有元件 : 设置有元件状态连续的数量。(下图所示为 6)
无元件 : 设置无元件状态连续的数量。(下图所示为 2)
1 2 3
4
5
1
2
6
2) 设定径向供料器 HMS 的元件确认
此功能是从径向供料器吸取元件失败时,通过 HMS 检测径向供料器元件有无的功能。仅
在元件类型为「插入元件」并且包装方式为「INS 带式」,选择「MRF-S」「 MRF-L」类型
时,才能设定此项。
检查个数
测量位置的个数。
夹紧
设定在夹紧的状态下使用 HMS 进行元件有无确认。初始设定为「执行」夹紧。
HMS 不能进行测定时
设定 HMS 的测定失败时元件有无的状态。初始设定为「有元件」。
EPU 使用说明书 第 4 章 制作生产程序
4-82
偏差 XY
距离元件的吸取位置的偏差值。HMS 的元件有无测定位置为
元件的吸取位置 XY + 偏差 XY。
初始设定为「X=-1」「 Y=0」,可示教。
对于 1 个元件,如果存在多个吸取数据,将移动到最先发现的吸取数据的吸取位置。
※请对无元件和有元件两种情况,示教可进行 HMS 测定的位置。
判定值
用于判定有无元件。
HMS 测定结果 > 判定值 → 有元件 。
HMS 测定结果 ≦ 判定值 → 无元件 。
初始设定为「Z = -18」,可示教。
对于 1 个元件,如果存在多个吸取数据,将移动到最先的吸取数据的吸取位置。
※判定值请参考以下公式输入。
判定值 = 切带机刀刃测定值(无元件时) +引脚长度- 2mm(引脚被夹紧的引脚长度)