KD-2077_使用说明书.pdf - 第32页
第 1 部 基本篇 第 1 章 设备概要 1 - 19 1-2-8 X,Y,Z, θ 轴的说明 本设备的 X 、 Y 、 Z 、θ 4 个轴均为数控 轴。 (1) X 、 Y 轴 装置的左右方向 为 X , 前后方向 为 Y ,以 0.01mm 为单位, 显示为 X =○○○ . ○○ mm , Y =○ ○ ○ . ○○ mm 。 坐标系分为生产程序 用坐标与示教 用坐标。 两坐标系可 以自动变 更, 无需刻意 分开使用。 (2) Z…
第 1 部 基本篇 第 1 章 设备概要
1
-
18
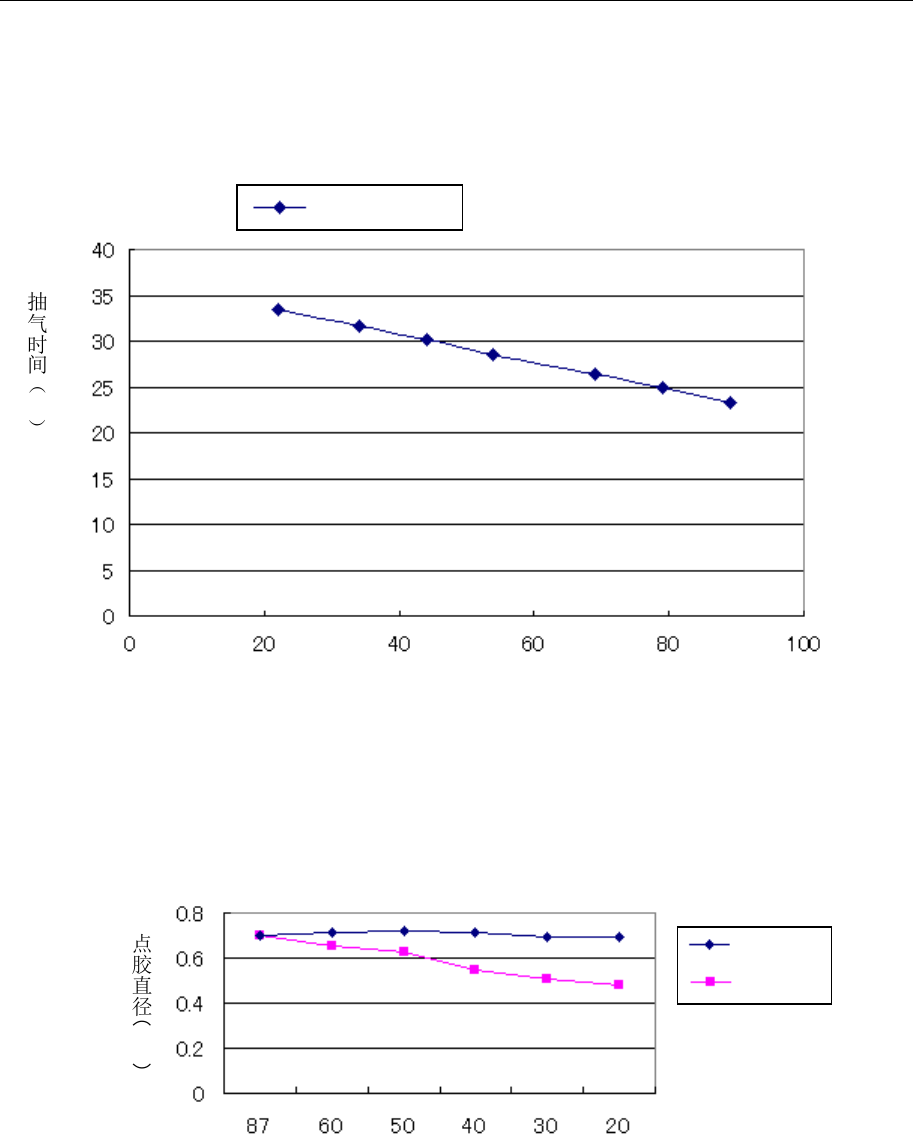
1-2-7 水头差补正功能、残量检知功能
在注射器内部加上压力,但不使胶粘剂挤出,通过测定其抽气时间测量注射器内部的水头
差(抽气量的差)。
根据测量的水头差,自动变更点胶压力以使注射器内部压缩空气的能量达到均一,根据抽
气量的差对点胶直径的变化进行补正。
充填率(%)
图 1-2-7-1 水头差-抽气时间特性
针: M针
胶粘剂:
LOCTITE 3609
水头差(充填率) (%)
图 1-2-7-2 水头差-点胶直径特性
ms
抽气时间(ms
)
补正有效
补正无效
mm
第 1 部 基本篇 第 1 章 设备概要
1
-
19
1-2-8 X,Y,Z,θ轴的说明
本设备的X、Y、Z、θ4个轴均为数控轴。
(1) X、Y 轴
装置的左右方向为X,前后方向为Y,以0.01mm为单位,显示为X=○○○.○○mm,Y=○○
○.○○mm。坐标系分为生产程序用坐标与示教用坐标。两坐标系可以自动变更,无需刻意
分开使用。
(2) Z 轴
显示高度,以0.01mm为单位,表示为Z=○○.○○mm。夹紧基板时基板上表面(不使用夹具)
为0,上升方向为+。
(3)
θ
轴
显示点胶头的旋转角度,以0.05°为单位,表示为A=○○.○○。
以逆时针旋转为正值。
Y+
X+
θ+
Z+
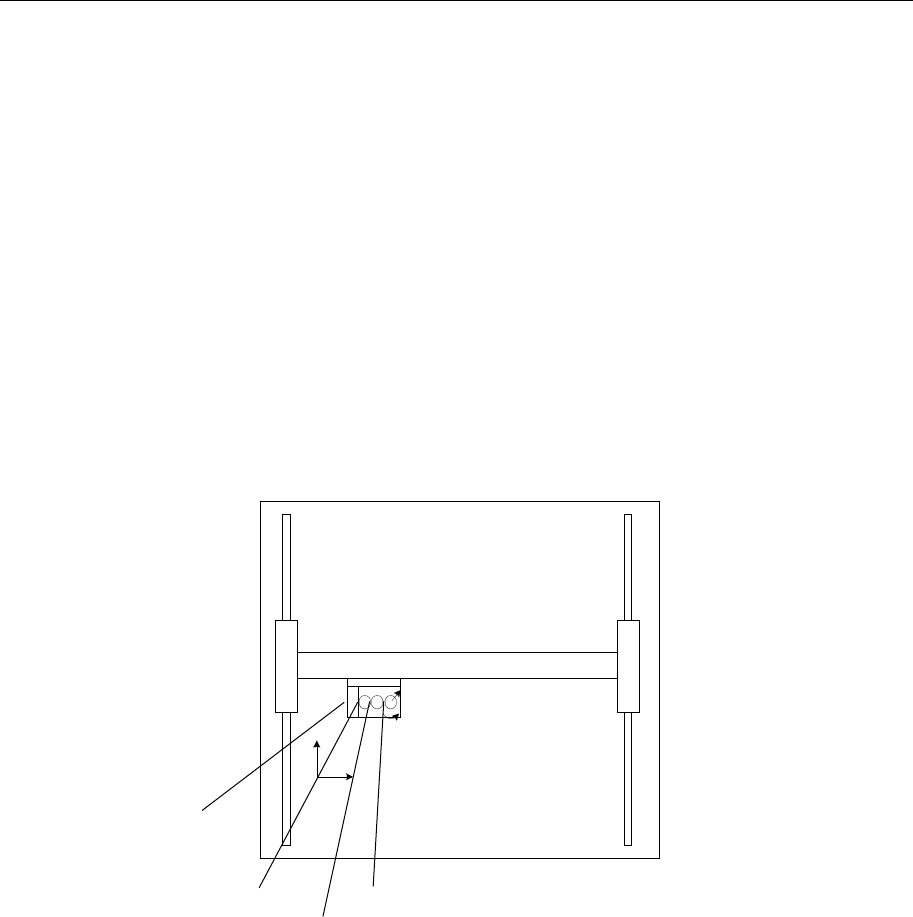
图 1-2-8-1
OCC
点胶头
1(L)
点胶头
2(C)
点胶头
3(R)
X
轴
Y
轴
第 1 部 基本篇 第 1 章 设备概要
1
-
20
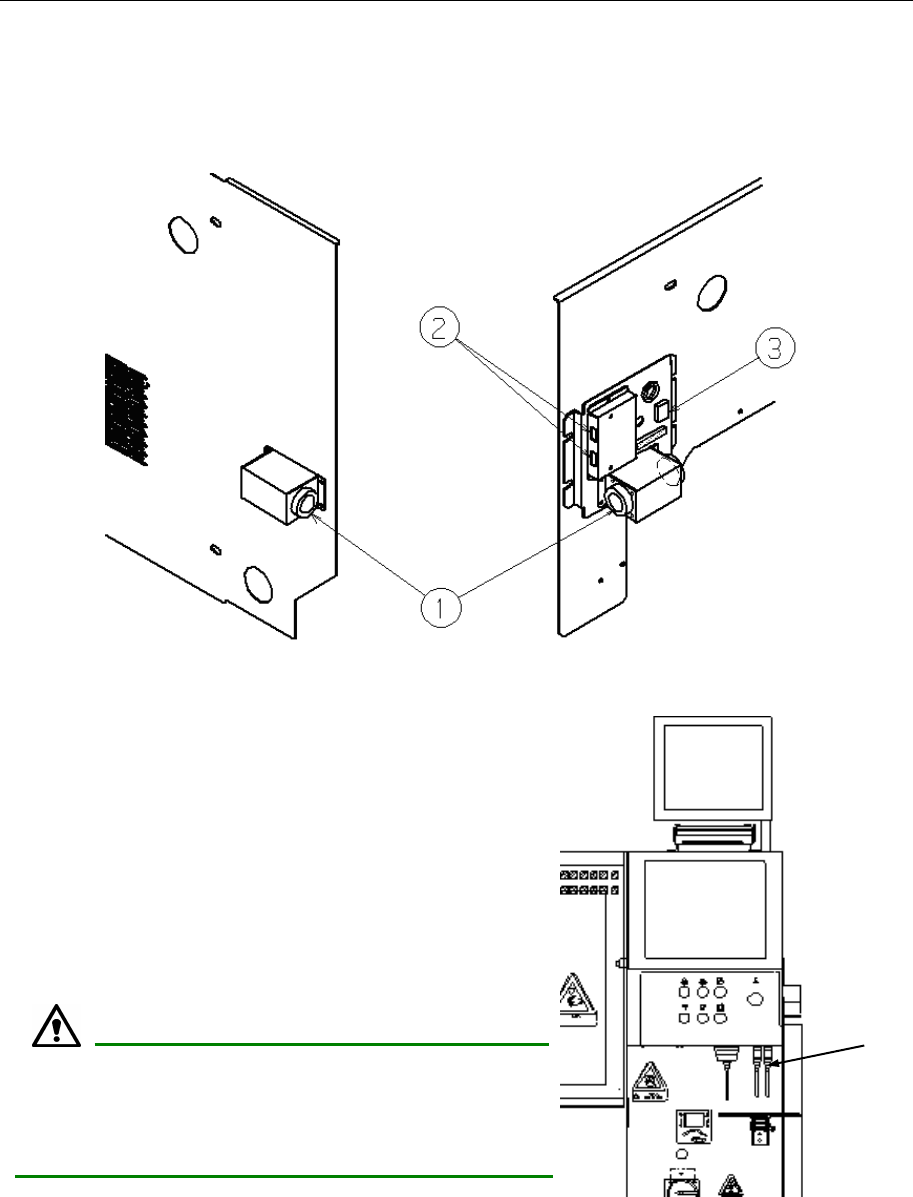
1-2-9 与外部设备的接口
① 本设备与其他设备连线操作时 ready out/in 所用的接口(14针)。传送方向“左→右”及“右
→左”时,ready out/in 接口的针配置相反。(参见表1-2-9-1及表1-2-9-2。)
② USB接口,相当于USB2.0。
③ 以太网(Ethernet)接口(模块接口8P)。
图 1-2-9-1 主体左侧 图 1-2-9-2 主体右侧
④ 为鼠标接口(9pin)。
⑤ 为键盘接口(5pin)。
⑥ 为手控操作盘(HOD)接口(50pin)。
鼠标与键盘的接口形状相同。
请勿连接错误,否则设备系统将无法启动。
注意
⑥
⑦
图 1-2-9-3 本体正面右侧