第1章 设备的特点及部品规格.pdf - 第2页
1-2 1.1.1. 硬件特征 头部的 Main Body 与一个强硬轻便的构架形 成一体化,高速时也可准确 工作。 图 1-1. Head Assembly Z 轴滑轮的球轴承变更为高功能事项,提高 了信赖性。 R 轴电动机变更为高功能事项,提高了工作 速度。 X-Y 轴驱动装置采用 T win Servo 系统,提高了 Y 轴驱动速度,它依靠 AC Se r voMotor 驱动,提高了总驱动速度 。 …

1-1
第1章. 设备的特点及部品规格
1.1.
SM321是对已有SM320性能的升级板,提高了生产性及客户的经济性,具有以下的
优点。.
提高部件及PCB 机板的适应性(High Flexibility)
可贴装 0402~ □55mm, 72mm 连接器部件
可适用于小型到大型 PCB 机板(L50 x W30 mm ~ L510 x W460 mm)
高生产性 (High Performance)
Chip 1608: 21,000 CPH (IPC9850 基准)
贴装精度(Accuracy): ± 30mm @3
高效率性 (High Effieciency)
SM Feeder 适用
全体可贴装 120 个 Tape Feeder (8mm 基准)
适用 SM Docking Cart 可迅速进行 Job Change
高信赖性 (High Reliability)
强化部件的内部构成。
圆滑的内部热换气系统,稳定的设备操作
RT CPU 板升级及运行SW 最佳化
内装 Power CPU,改善了贴装性能。
改善包括动作控制器的控制 HW
最佳化升级设备应用 SW,提高了速度。
vision algorithm改善
改善了影像处理 algorithm,可部分选择/分析必要的部分。
为防止错误发生时的贴装遗漏现象,添加了吸嘴自动确认功能。 (Auto
Bare Nozzle check function)
增加了实时自动反映贴片尺寸微小变化的识别功能。
强化 LED 颠倒确认功能
强化 BGA 方向确认功能
方便的用户界面
Windows XP 版本、强化用户方便性的 MMI
支持功能增加的 EasyOLP Ver 5.3
1-2
1.1.1. 硬件特征
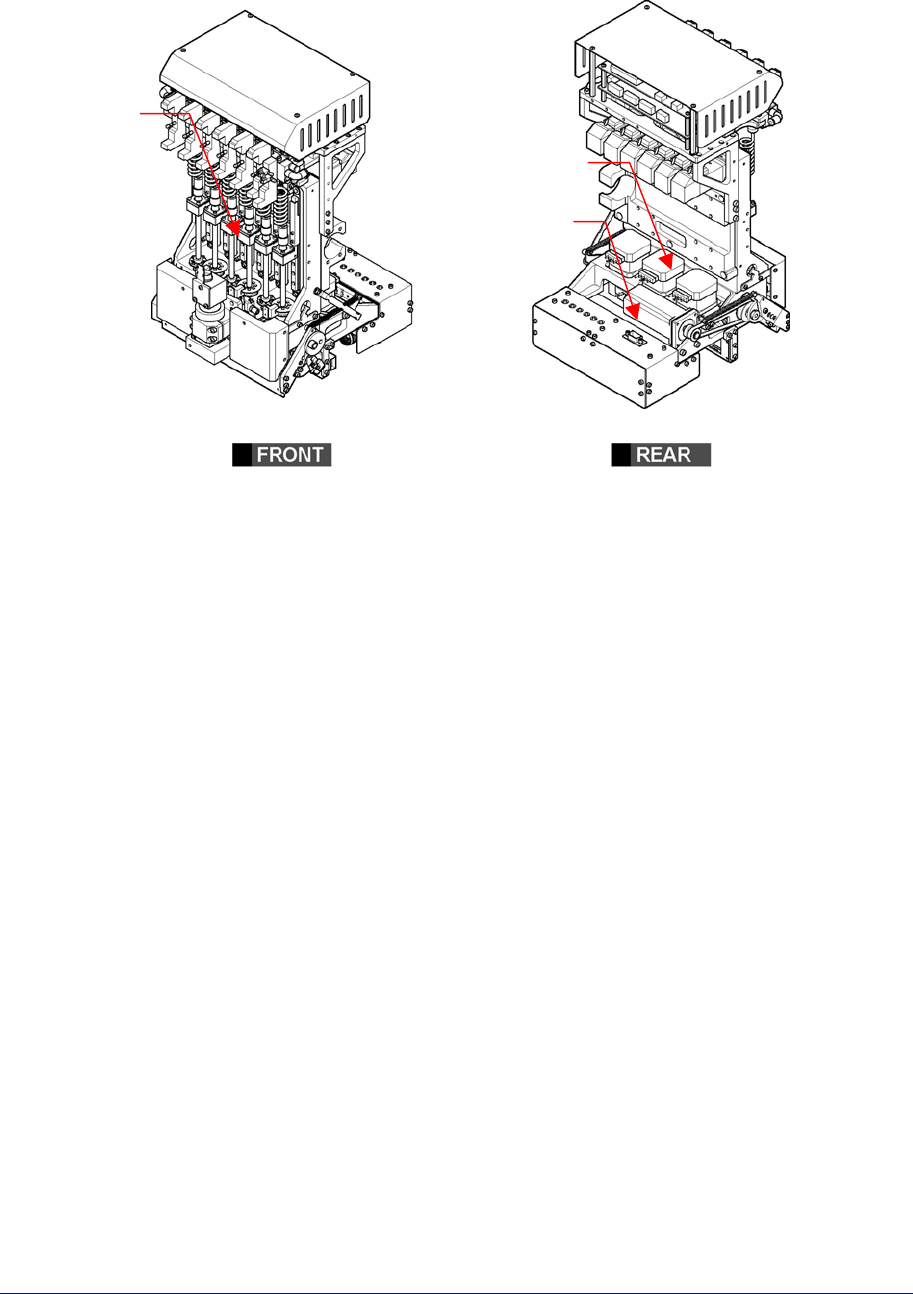
头部的 Main Body 与一个强硬轻便的构架形成一体化,高速时也可准确工作。
图 1-1. Head Assembly
Z 轴滑轮的球轴承变更为高功能事项,提高了信赖性。
R 轴电动机变更为高功能事项,提高了工作速度。
X-Y 轴驱动装置采用 Twin Servo 系统,提高了 Y 轴驱动速度,它依靠 AC Ser
voMotor 驱动,提高了总驱动速度。
改善备份桌面(backup table)的驱动机制,提高了备份桌面的上升及下降速
度。
变更输送机的 PCB 导轨的厚度,为吸附及贴装头部移动时的 Z 轴高度,消除 Z
轴上升及下降时的时间浪费,缩短了吸附及贴装所需要的时间。另外,改善输
送机的传送带,提高了 PCB 的移送速度。
利用 100 万像素照相机,提高了 flying vision 的部件对应力。 100 万像素照相
机为选项。
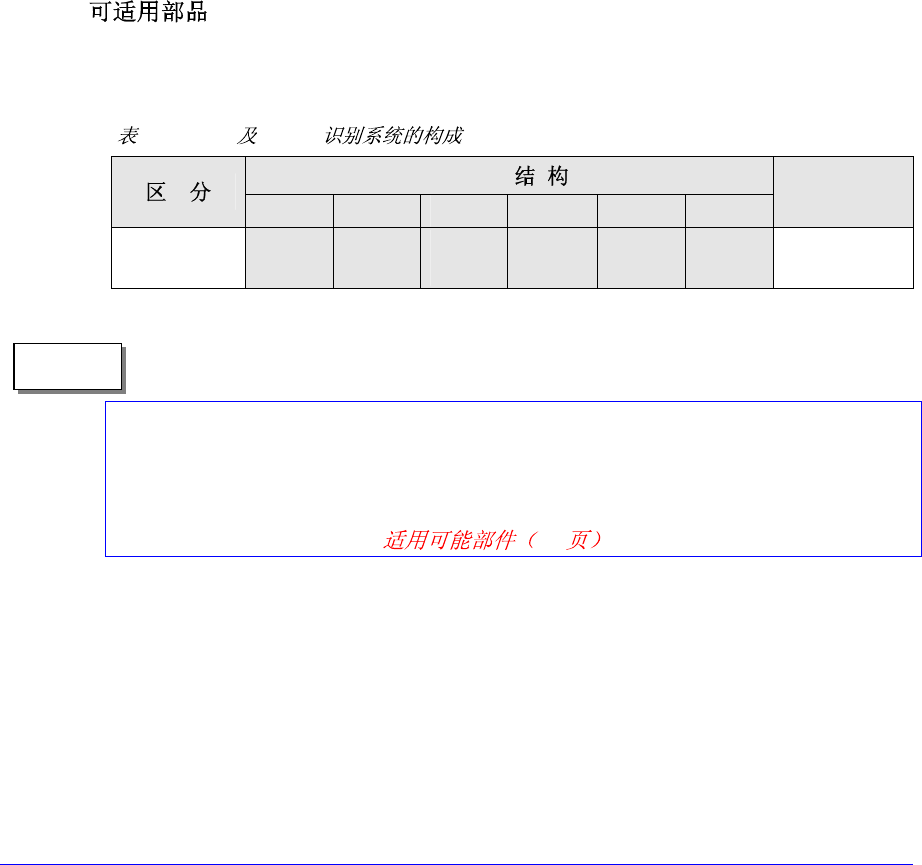
为了识别多种部件 飞 行 相 机 ( Flying Vision Camera ) 识别 采 用了
FOV 25mm, FOV 15mm, FOV 10mm , Stage Camera采取了
FOV20mm, FOV 35mm, FOV 45mm。 (FOV 10, 15, 20, 45 mm Camera为备
用)
确保对微小贴片的吸嘴、供给装置及图像识别能力,可实际贴装0402部件。 (
适用FOV 10mm 照相机时)
Flying Visio
n
R 轴 Moto
r
Spindle
1-3
1.1.2. 软件特征
改善贴装序列,提高贴装速度。
改善图像软件,提高部件识别速度、对应力及信赖性。
图像拍摄及传送速度最佳化,缩短图像识别,提高总的部件识别速度。
改善分割识别算法,扩大对大型部件的对应范围。 (FOV 45mm 适用时,
最大可对应□55mm 部件)
改善部件识别算法(
algorithm),
提高了部件识别信赖性及检查功能。
设备的OS适用了Microsoft的Embedded Windows XP。支持多种语言。
用户界面MMI强化了用户的方便性功能。
强化了用户权限设置功能。
增加了生产监控及生产报告书输出功能。
强化了用户文件管理功能。
1.2.
1.2.1. Head及Vision识别系统的构成
与需要贴装的部品相关的 Head及Vision识别系统的构成如下表。
1-1. Head Vision
Head
Head 1 Head 2 Head 3 Head 4 Head 5 Head 6
Vision
System
SM321
25mm
Vision
25mm
Vision
25mm
Vision
25mm
Vision
25mm
Vision
25mm
Vision
FOV
20/35/45
1号贴装头到6号贴装头基本装有FOV25mm的Flying Vision Camera,对贴装
程度有要求的部件 (例:0603 Chip等)可选择使用FOV 15或FOV10 mm Ca
mera。
Stage Camera基本装有FOV 35mm,FOV 20/45mm Camera为备用,可选择交
替使用。(请参照“1.2.2 1-3 ”)
1.2.2. 可适用部品的规格
1.2.2.1. Flying Vision识别系统
以下表格是有关本设备中适用的部品规格的规定,主要适用于一般的部品。
备 注