00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第104页
Communication and Control Communication CPP Head CAN Bus Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 104 CAN Bus-controlled h ead functions on the C&P20A h ead Communication CPP Head 4.3.8 Communication CPP Hea…
Communication and Control
CAN Bus Communication DP Drives, C&P20A and CPP Head
103 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
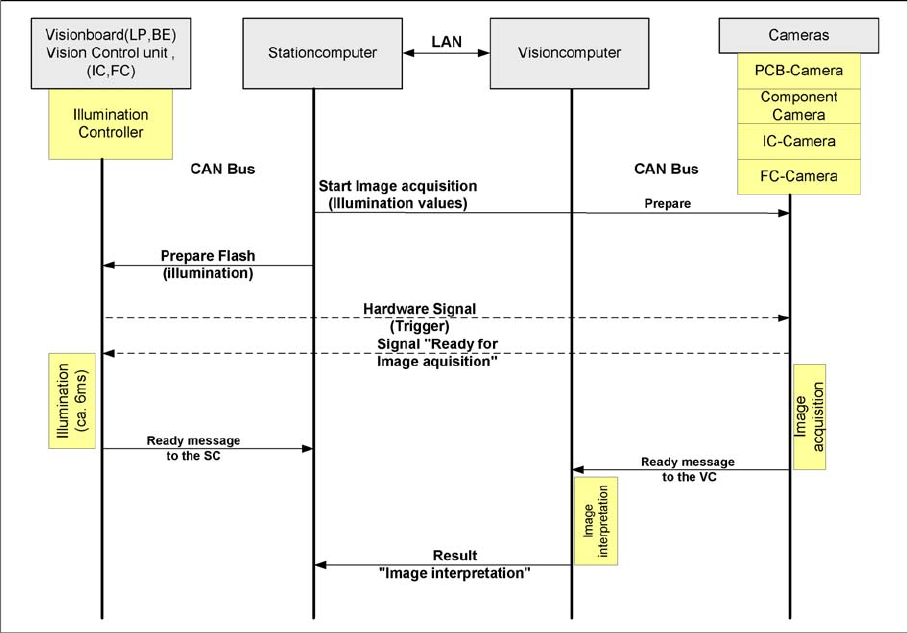
Time sequence from up to down for image acquisition communication
Communication DP Drives, C&P20A and CPP Head
4.3.7 Communication DP Drives, C&P20A and CPP Head
The TQM module on the head interface C500 communicates via the CAN Bus (1M/Bit/s) with the station
computer.
The communication to the C&P20A or CPP head is via an additional CAN Bus, which sends the data
with 500 KBit/s.
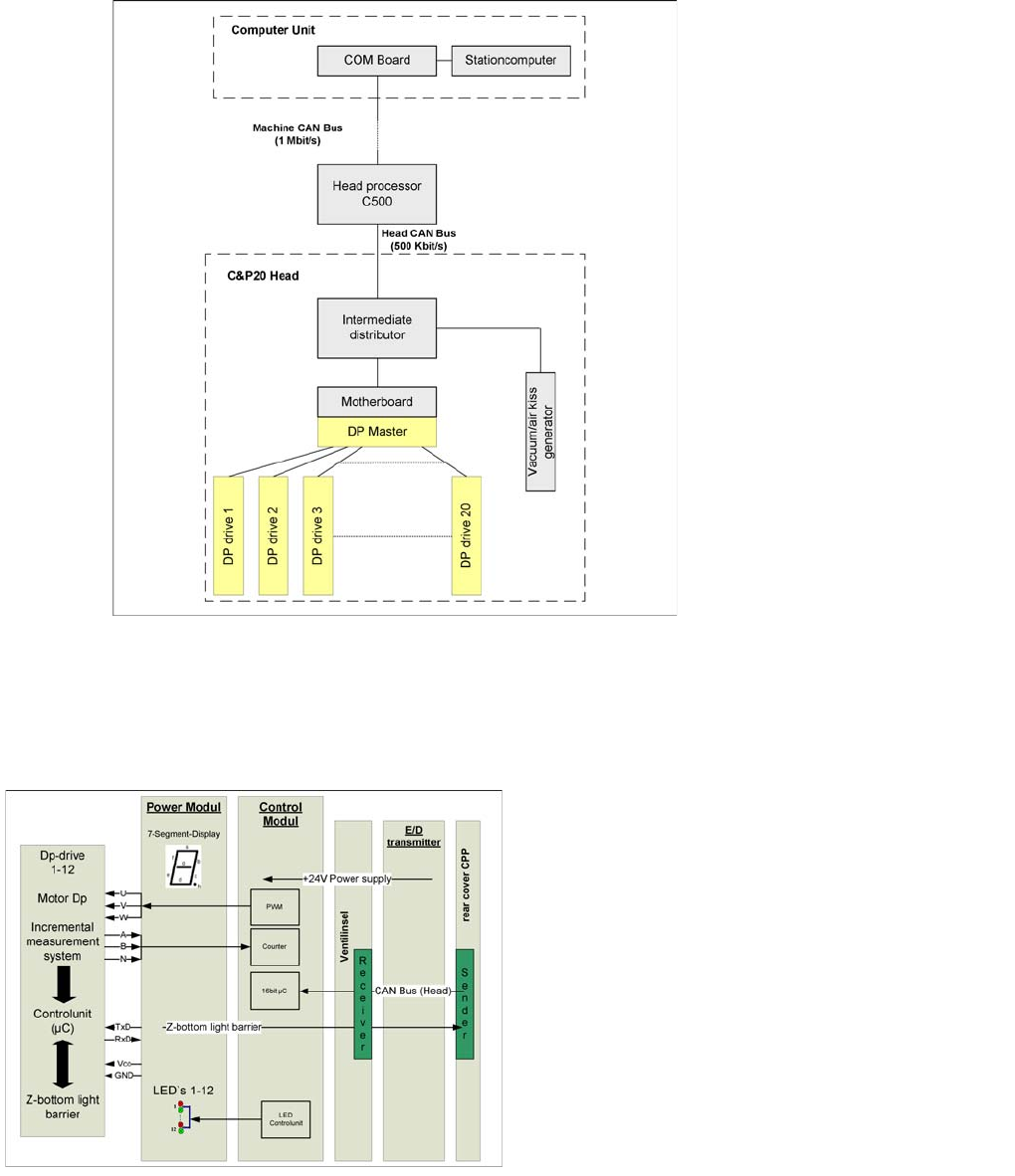
The DP axes are controlled via the DP master (SCS). 4 actions are performed by the machine control at
the same time:
▪ Starts a certain rotary axis after pickup/placement (pickup angle/placement angle)
▪ Starts a certain rotary axis after Vision (correction angle)
▪ Waits for a certain rotary axis before Vision (positioning command not allowed)
▪ Waits for a certain rotary axis before pickup/placement (positioning command not allowed)
Communication and Control
Communication CPP Head CAN Bus
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 104
CAN Bus-controlled head functions on the C&P20A head
Communication CPP Head
4.3.8 Communication CPP Head
Communicati on to the DP Dri ves
4.3.8.1 Communication to the DP Drives
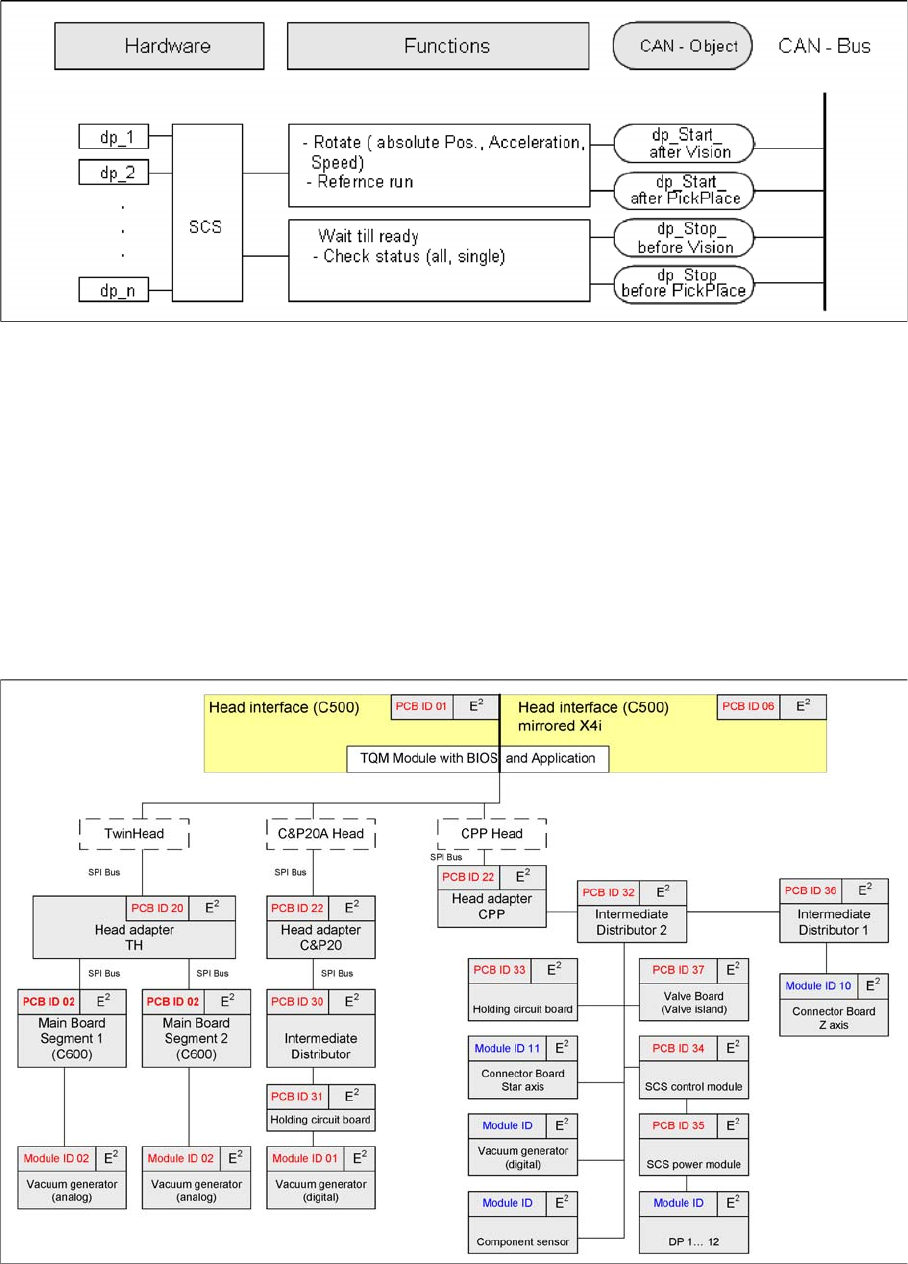
The DP drives are controlled via a common hardware
component, the SCS (Single Core Solution). This
consists of two boards, the power and the control
modules, with a microprocessor for the sequence control.
The control data is sent from the head processor and is
then transmitted via the head CAN bus.
The communication with the light barrier Z down is via a
separate interface, directly to the power module. This is
necessary as a light barrier Z down is integrated into each
segment.
Communication and Control
CAN Bus Communication CPP Head
105 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
CAN Bus Communication to the DP Drives
4.3.8.2 CAN Bus Communication to the DP Drives
The data is supplied via the head CAN bus, from the head interface to the intermediate distributor.
The four CAN bus commands are identical to those for the C&P20A head:
▪ Starts a certain rotary axis after pickup/placement.
▪ Starts a certain rotary axis after Vision.
▪ Waits for a certain rotary axis before Vision.
▪ Waits for a certain rotary axis before pickup/placement.
EEPROMs on CPP H ead
4.3.8.3 EEPROMs on CPP Head
EEPROMs are present on all boards (except E/D transformer). Various data are stored there, according
to the individual functions e.g. production date, material number, zero point correction values, offset
values, plus operating and statistical data.