00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第190页
Gantry PCB Boards on the Gantry Settings Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 190 PCB Boards on the Ga ntry 6.3.2 PCB Boards on the Gantry The printed circuit bo ards which are described in this chapter are …
Gantry
Settings Travel Ranges and Speed Monitoring
189 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
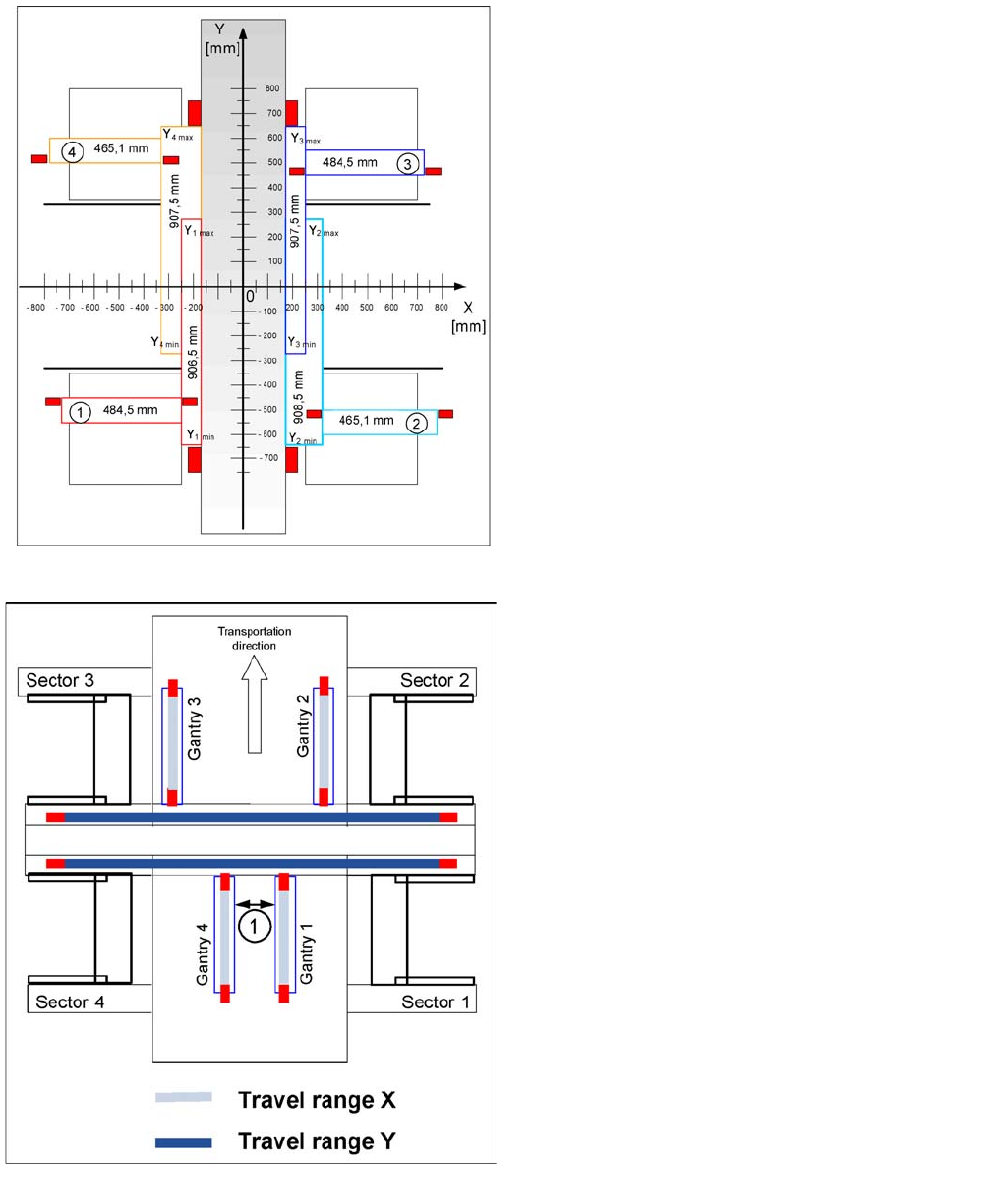
The X axis moves to the left and right bumper and measures their positions with a safety distance of 2.0
mm. The SW also deducts a value of 0.5 mm from the maximum or minimum travel range.
The Y axis moves to its minimum position (gantry 1/2) or to its maximum position (gantry 3/4).
The position opposite is then calculated.
Travel ranges for X and Y axes (X4I)
Legend
▪ 1 - 4 = gantry 1 to 4
The end of the X axis travel range is + or - 0.5 mm before
the software limit switch, which is 1.5 mm before the
bumper. A safety distance of 2.0 mm to the bumper is
adequate, if the X axis moves into this area with
excessive speed.
The end of the Y axis travel range is + or - 2.0 mm before
the software limit switch. The Y axis travel range for a
particular placement area is monitored in one direction by
the software limit switch and a bumper. In the other
direction, there is a permanent exchange of
communication between the axes and their positions, via
the SPI Bus (see description of the anticrash function).
Travel ranges for X and Y axes
Legend
1. The minimum safety distance between the gantries,
during placement: minimum 4 mm.
Depending on the placement mode (i-placement or
alternating), the gantries will operate in one placement
area fully independently. This means that one gantry
does not need to know the position of the other one.
Gantry
PCB Boards on the Gantry Settings
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 190
PCB Boards on the Gantry
6.3.2 PCB Boards on the Gantry
The printed circuit boards which are described in this chapter are basically identical on each gantry and
do not depend on the head configuration. The gantry identification settings and the CAN bus terminating
resistance settings are defined at the DIP switch on the head interface.
Head Interfa ce C500
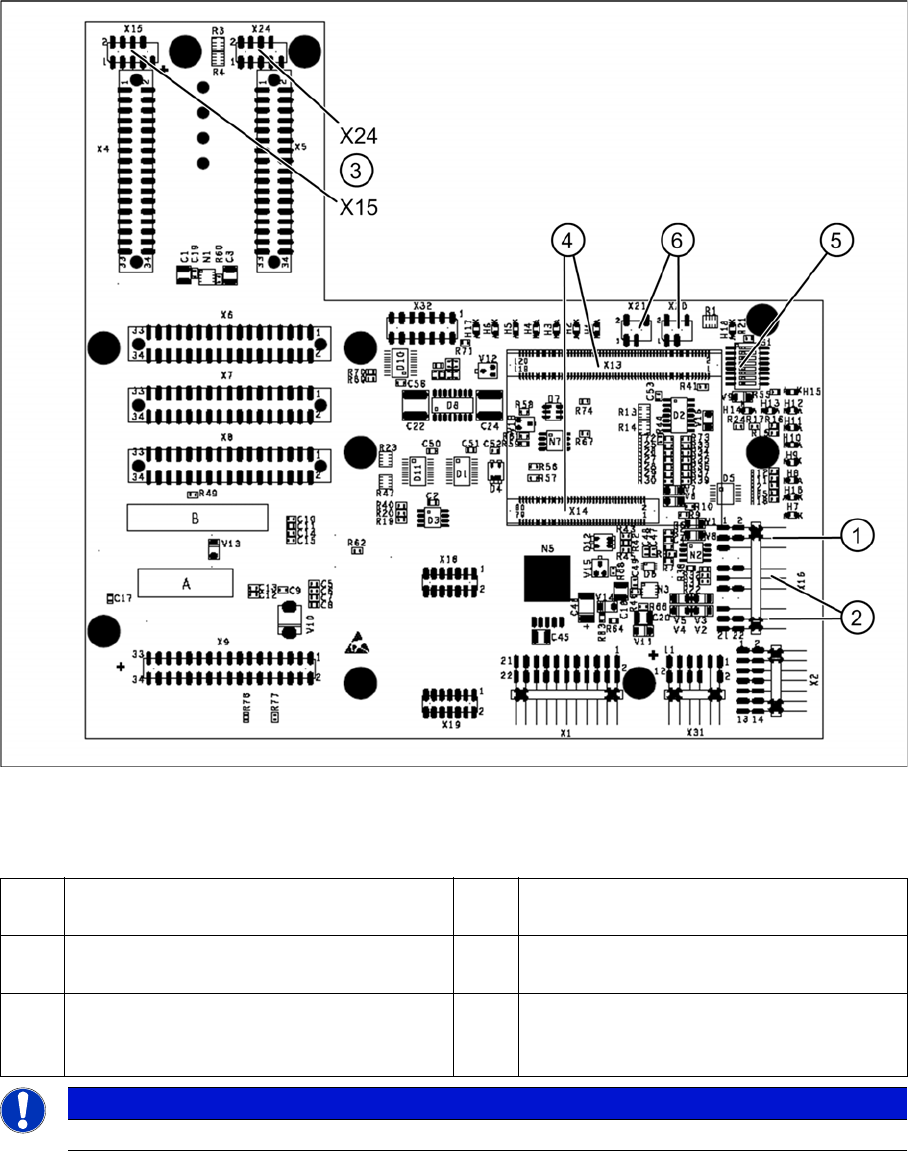
6.3.2.1 Head Interface C500
Head interface (C500)
Legend
1 X16 temperature sensor for X axis 4 X13 / X14 Connector for 16 Bit processor
board (TQM module)
2 Proximity switches for X axis travel range
(not with A364)
5 DIP Switch
3 X15 Connector for incremental encoder X
axis (X24 connector digital track signals X
axis)
6 X20/X21 both connections can be used for
the temperature sensors.
NOTICE
The DIP switch configuration for the gantry configuration is described in chapter Gantry.
Gantry
Settings PCB Boards on the Gantry
191 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
LEDs on the Head Interface
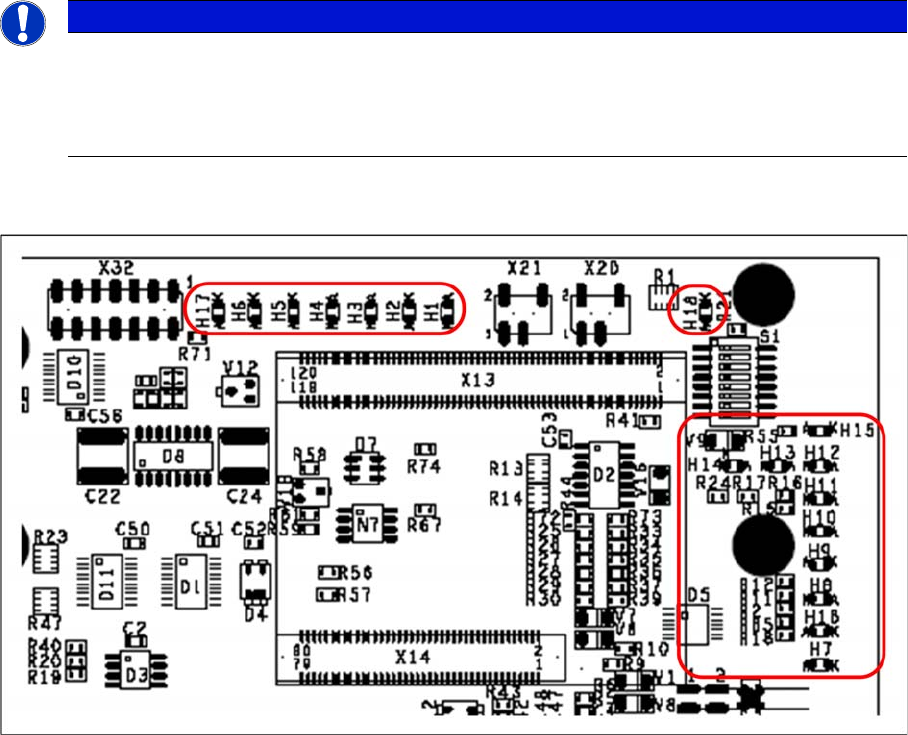
LEDs on the Head Interface
Head interface with status LEDs
LED H1-H6,H17,H18 (functional check)
▪ H17 SPI - Serial parallel interface (test)
▪ H6 D-ON - digital ON 5V DC/DC converter (power supply head interface, generated from the 24V)
▪ H5 H-OK - Head adapter board connected
▪ H4 C-In - CAN Internal (status off)
▪ H3 MRST - Main Reset (always off)
▪ H2 F-UC – Failure - UC test
F-UC flashes red after switching on the machine:
- eSW unable to perform one or more functions or initialization of a subsystem.
- flashes while the production power fail signal is active or 15V missing.
▪ H1 MP - Main Power fail, mean 5 V power supply being missing at the machine (e.g. CAN Bus)
▪ H18 1 Wire LED shows the high level on PIN 1 of 5V ON is green --> OK
LED H7- H15, H1B (LEDs for voltages)
▪ H14 Vcc - shows the output signal of the DC/DC converter (H6) +5 V
▪ H13 N15V – -15 V for TwinHead --> force measurement board (not for X4I)
▪ H15 P3,3V - Controller OK
▪ H12 P15V - Plus 15 Volt light barrier bottom C&P head
▪ H11 P24V - 24 V power supply (e.g.stepping motor)
▪ H10 AV ER - Failure 5 V
▪ H9 EN AN – 16 bit processor connected --> supply voltage OK
NOTICE
X4I
In the SIPLACE X4I machine, a mirrored version of the head interface C500 is fitted on gantries
2 and 4.
► Observe the different item number!