00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第194页
Gantry PCB Boards on the Gantry Settings Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 194 Checking the DIP Switches 6.3.2.4 Checking the DIP Switches DIP Switches on the Head Interfa ce DIP Switches on the Head Inte…
Gantry
Settings PCB Boards on the Gantry
193 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Legend
CAN Processor Board 16 Bit
6.3.2.3 CAN Processor Board 16 Bit
The 16 bit CAN processors are used for various functions on the following assemblies: (see also chapter
Communication and Control)
▪ Vision board: communication and control via CAN bus to station computer.
▪ Head processor board (C500), if a C&P head has been configured: control of head processes and
of vacuum generators
Description of 7 segment display (in normal mode the dot is flashing "."):
▪ After switching on, a "0" appears on the display
▪ Display "b" --> BIOS starts.
▪ Display flashes alternatively between "b" and "." --> no application available or unable to start
application.
▪ Display "-I" and "I-" --> application has been loaded and will now start.
▪ The dot "." on the display is flashing. --> the processor has booted and is ready for operation.
1 X8 Connector illumination and video
signals PCB camera
5 CAN processor 16 Bit (TQM module)
2 X3 Connector illumination and video
signals component camera
6 DC/DC converter 15 --> 5V for Vision
system.
3 LED‘s P15V - 15Volt / Vcc - Power supply
Vision board
7 Connector X4 – connection for video
signals to trailing cable
4 DIP switch
NOTICE
The DIP switch configuration for the gantry configuration is described in "6.3.2.4 Checking the
DIP Switches" [ ➙ 194].
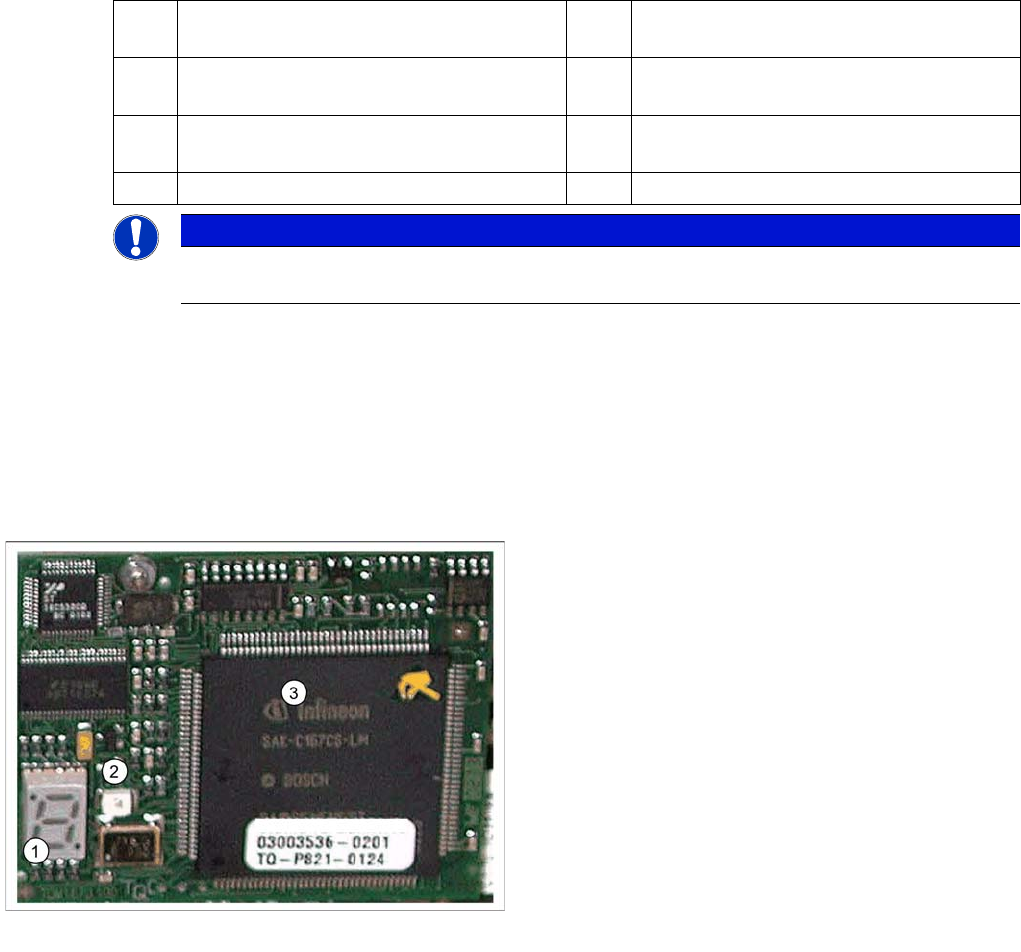
16 bit processor (TQM module)
Legend
1. 7 segment display
2. LED
The LED is red if you perform a manual RESET of the
processor.
3. 16 bit processor
Gantry
PCB Boards on the Gantry Settings
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 194
Checking the DIP Switches
6.3.2.4 Checking the DIP Switches
DIP Switches on the Head Interfa ce
DIP Switches on the Head Interface
* Not all gantries may be available, depending on the machine type.
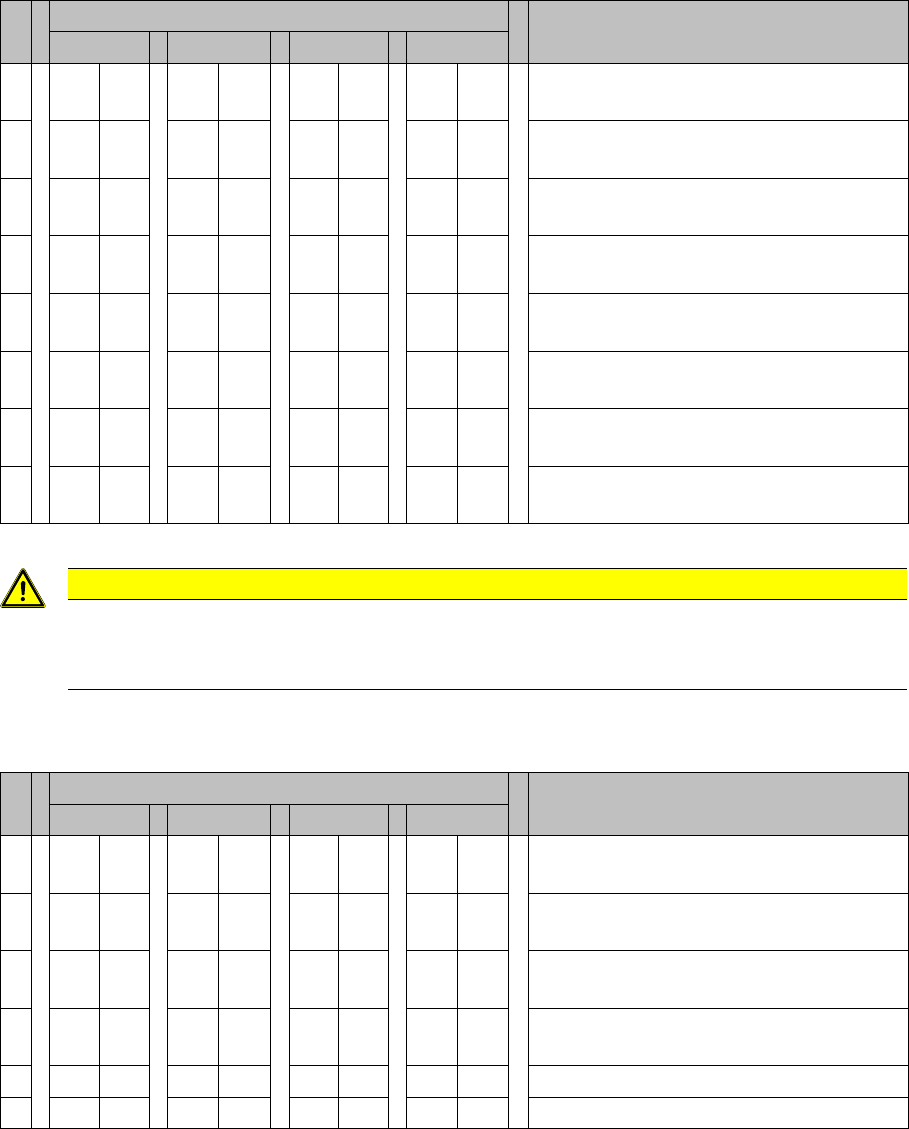
DIP Swit ch on th e Vision B oard (Digital Vers ion 02)
DIP Switch on the Vision Board (Digital Version 02)
* Not all gantries may be available, depending on the machine type.
S Gantry* Comments
1 2 3 4
1 OF
F
ON OF
F
ON P0 - Address switch 1 --> Gantry
2 OF
F
OF
F
ON ON P1 - Address switch 2 --> Gantry
3 ON ON ON ON CAN R - CAN terminator (always OFF for
TwinHead)
4 OF
F
OF
F
OF
F
OF
F
Boot - CAN processor 16 bit
5 OF
F
OF
F
OF
F
OF
F
Reset - CAN processor 16 bit
6 OF
F
OF
F
OF
F
OF
F
C0 - CAN Address switch
7 OF
F
OF
F
OF
F
OF
F
C1 - CAN Address switch
8 OF
F
OF
F
OF
F
OF
F
WPE - Write protect enable at the moment
OFF
CAUTION
Switch 3 (does not apply to X4I machines)
When using Head Modularity make sure that the terminating CAN resistor is set correctly. This
means, Switch 3 is set to ON for C&P and to OFF for the TwinHead.
S Gantry* Comments
1 2 3 4
1 OF
F
OF
F
OF
F
OF
F
Reset - CAN processor
2 OF
F
ON OF
F
ON PID0 address switch 1 -> gantry
3 OF
F
OF
F
ON ON PID1 address switch 2 -> gantry
4 OF
F
OF
F
OF
F
OF
F
CAN R - switch for the terminal resistor on
the CAN bus
5 ON ON ON ON Speed: ON = 1 Mbit/s, OFF = 500 Kbit/s
6 ON ON ON ON CAN ID - for X machine ON
Gantry
Settings Anticrash Function for the A364 Axis Card
195 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Anticras h Function for the A364 Axis Card
6.3.3 Anticrash Function for the A364 Axis Card
Anticras h Function for the A364
6.3.3.1 Anticrash Function for the A364
▪ The anticrash function is no longer provided by the anticrash board but instead by the A364 software
(application 1). This means that the proximity switches used to monitor the travel range and the
sensor for monitoring the gantry spacing are no longer required.
▪ Tasks:
– Monitoring the X and Y axis travel ranges
Evaluation of the actual position of the respective axis in the direction of the bumper, based on
the speed.
– Monitoring the distance of both Y axes in a placement area
Evaluation of the actual position of the own gantry and the partner gantry at gantry crash
monitoring.
– Count error monitoring of the gantry axis
Monitoring incoming count pulses (edge control) over time.
Anticras h Monitoring for t he A364
6.3.3.2 Anticrash Monitoring for the A364
The anticrash function is activated after the X/Y axes have been referenced. When the gantry axes are
referenced for the first time, anticrash monitoring is not active, which does not matter, due to the low
reference speed.
After this, the bit is set for the anticrash monitoring function and the actual position for the relevant
partner gantry is continuously communicated via the SPI Bus.
The following information is exchanged between the Y axes:
▪ Actual position and speed of the own gantry
▪ Status information (reference state, anticrash monitoring state ).
Error "Gantry Crash"
6.3.3.3 Error "Gantry Crash"
A “gantry crash” error is established by calculating the position difference and speed difference for both
axes. A gantry crash error is signaled via the axis card and the CAN Bus. The servo is released for both
axes and both need to be referenced again.
Count Error:
6.3.3.4 Count Error:
If the axis board detects a "fatal count error", the axis concerned will be released and the anticrash
function disabled. The other axis is informed of this in the status information and will also disable the
anticrash function. The released axis now needs to be referenced again.
after which the anticrash function will be re-enabled for both axes.