00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第297页
Collect, Pick and Place Head (CPP) Pickup and Placement Cycle for CP P Turning Nozzles 1 to 12 to th e Pickup Angle (0° or 90°) 297 Student Guide SIPLACE X-Serie and X4I SW70x (AL2) Turning Nozzles 1 to 12 to the Pick up…
Collect, Pick and Place Head (CPP)
Board Recognition - Centering the Board Fiducials Pickup and Placement Cycle for CPP
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 296
Board R ecognition - Centering the B oard Fiducials
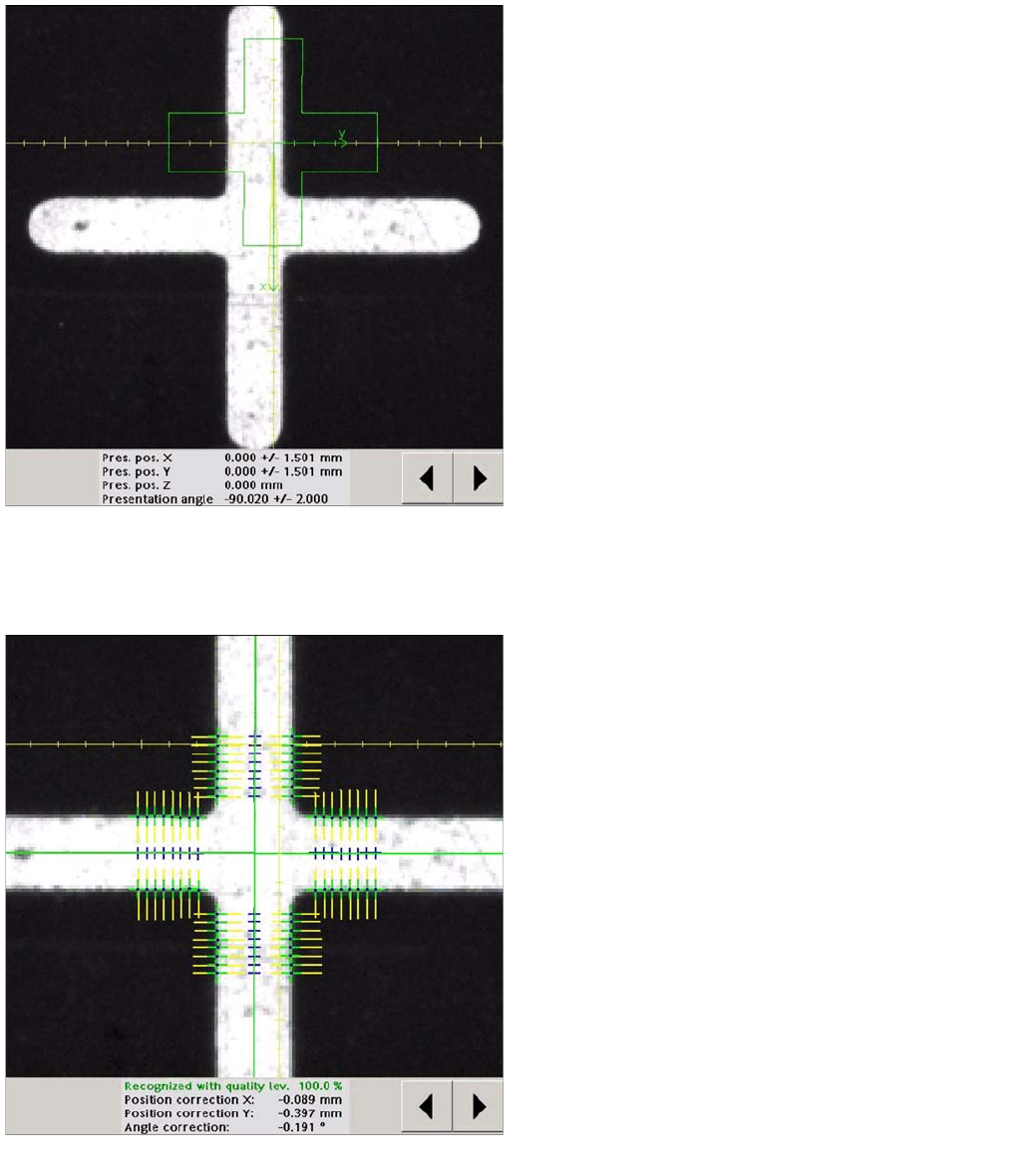
8.4.4 Board Recognition - Centering the Board Fiducials
Board recognition run to target position of board
The fiducial is expected at this target position. The PCB
camera is moved from waiting position to this fiducial
position.
▪ Board position recognition is performed before the
first component is picked up.
▪ The gantry axes move the PCB camera to the
theoretical fiducial position. The camera takes the
picture of the first fiducial and the Vision system
calculates the center position.
Board recognition - centering the board fiducials
The centered fiducial now defines the actual position of
the board.
▪ The camera records an image of the 2nd fiducial and
the Vision system calculates the center position of
this image.
▪ The 2nd calculation is the deviation between the
target and the calculated fiducial position.
▪ All board fiducials are optically centered with this
procedure.
▪ This data is sent to the machine controller.
▪ Corrected values are now calculated for the X,Y and
angular position of the board.
▪ The gantry axes now move the placement head to the
first pickup position.
Collect, Pick and Place Head (CPP)
Pickup and Placement Cycle for CPP Turning Nozzles 1 to 12 to the Pickup Angle (0° or 90°)
297 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Turning Nozzles 1 to 12 to the Pick up Angle (0° or 90°)
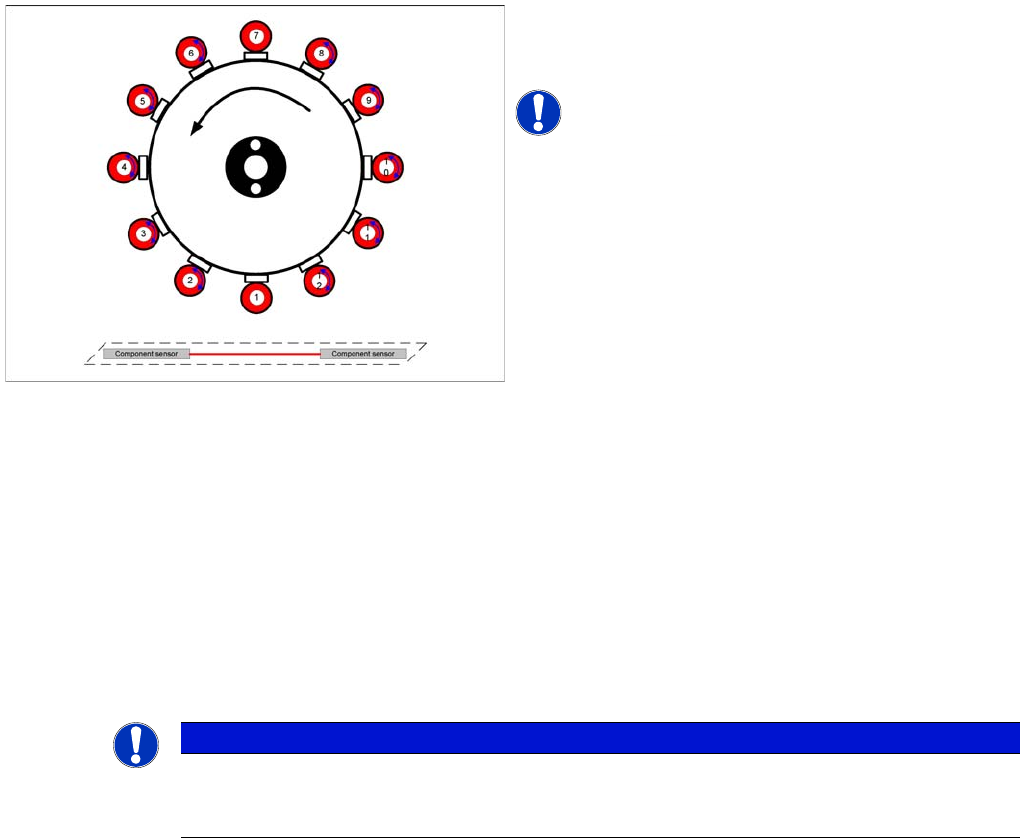
8.4.5 Turning Nozzles 1 to 12 to the Pickup Angle (0° or 90°)
Procedure for Picking Up Components
8.4.6 Procedure for Picking Up Components
Prerequisite: The nozzle must be in the correct pickup position (0° or 90°).
1. The gantry moves over the pickup position of the 1st component.
2. Valve 1 of the valve terminal is switched on.
3. Vacuum measurement in pickup/place circuit „open“
4. The Z axis travels down and interrupts the component sensor.
5. The Z position is read out, the nozzle length calculated and compared to the reference length from
the height reference run.
1. The vacuum is switched on (pressure control valve - either "early vacuum" or with light barrier down,
depending on the pickup profile.)
2. The Z axis moves up. A vacuum check is performed to determine whether there is a component on
the nozzle.
3. The component sensor is released and the Z position is read out. Either the component height is
calculated or a presence check is performed.
4. A vacuum check is performed when the Z axis is in the top position.
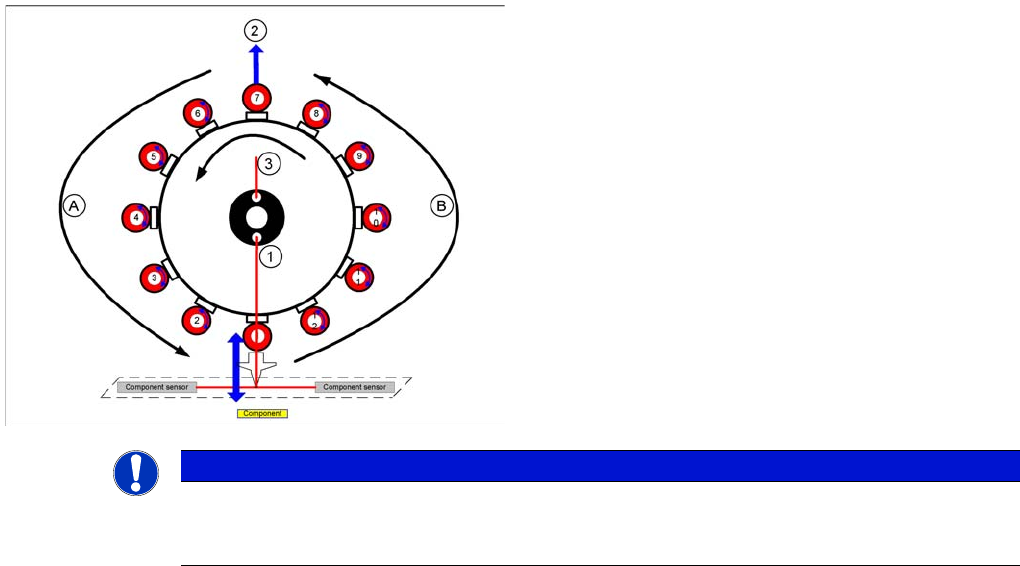
5. The star is rotated and more components are picked up.
6. The component on segment 1 is rotated into the placement position by the DP drive (area A).
7. A component is picked up at segment 7.
8. The component at segment 1 is optically centered under the component camera.
9. A placement angle correction run is performed after optical centering (area B).
10. Once all 12 components have been picked up, the pickup process has finished.
Turning segments 1 to 12 to the pickup angle (0° or 90°)
▪ The segments in the CPP head are turned in
succession, from segment 1 to 12, to the required
pickup angle of 0° or 90°.
NOTICE! Each segment has its own DP drive
NOTICE
This calculated nozzle length is used when moving up in the placement cycle, to check whether
the component is placed. If a length difference of -0.15 mm or +0.1 mm is found, a warning will
be issued: Replace nozzles.
Collect, Pick and Place Head (CPP)
Procedure for Placing Components Pickup and Placement Cycle for CPP
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 298
Procedur e for Placing Co mponents
8.4.7 Procedure for Placing Components
Prerequisite: The pickup process and optical centering must have been completed successfully.
1. The gantry moves over the placement position of the 1st component.
2. Vacuum measurement in pickup/place circuit „closed“
3. The Z axis travels down and interrupts the component sensor.
4. The Z position is read out. The nozzle length and component height are calculated using the value
from the Z axis up pickup procedure.
5. Switch on air blast (pressure control valve, depending on programmed placement profile)
6. The Z axis moves up.
7. The component sensor is released and the Z position is read out. The nozzle length is calculated
using the value from the Z axis down (reference value) pickup procedure. The component is placed.
8. The valve for the segment 1 valve terminal is switched off.
9. A vacuum check is performed when the Z axis is in the top position.
10. The star is rotated and more components are placed.
11. Segment 1 is rotated by the DP drive into the pickup position for the next component (area A or B).
12. Once all 12 components have been placed, the placement process has finished.
Legend
1. Vacuum measurement pickup/place circuit
2. Optical centering SIPLACE Vision
3. Vacuum measurement holding circuit
A : Rotate component into placement angle
B : Placement angle correction after optical centering
NOTICE
All vacuum measurements during the placement process are performed in the background and
do not produce any error messages. The error messages concerning missing components etc.
are produced only by the component sensor.