00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第320页
TwinHead TwinHead Assemblies Overview Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 320 TwinHead A ssemblie s 9.1.2 TwinHead Assemblies Vacuum Gene rator Twin Head 9.1.2.1 Vacuum Generator TwinHead TwinHead Assemblie…
TwinHead
Overview Technical Data TwinHead
319 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
TwinHead
9TwinHead
Overview
9.1 Overview
Technical Da ta TwinHead
9.1.1 Technical Data TwinHead
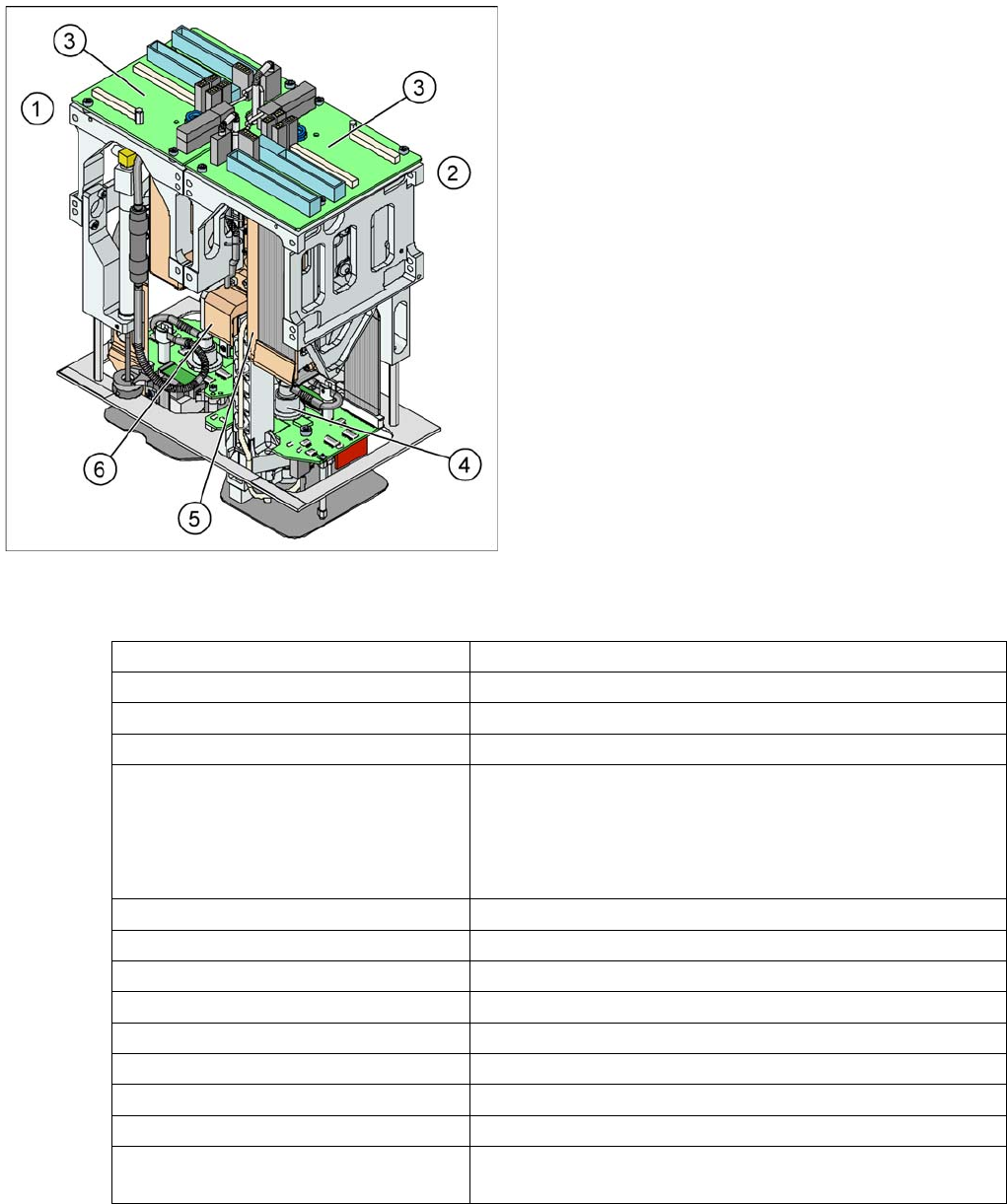
Legend
1. Module 1
2. Module 2, rotated by 180° compared to module 1.
3. Main board on respective module
4. D axis
5. Linear motor Z axis
6. Z axis incremental measurement system
The TwinHead consists of two identical modules which
work according to the Pick&Place principle. The second
P&P head is rotated by 180 degrees.
For the TwinHead, new nozzles (Type 5xx) were
developed. However, the nozzles of the Pick&Place head
type 4xx and the nozzles of the Collect&Place heads type
8xx and 9xx can be used with an adapter.
Placement accuracy (X/Y) 35µm by 4 sigma with IC camera
Placement accuracy (X/Y) 30µm by 4 sigma with FC camera
Placement accuracy (Angle) 0,07° by 4sigma
Placement speed 3500 cph
Maximum component size: 50 to 40 mm (single measurement on both segments)
69 to 10 mm (multiple measurement on both segments)
125 to 10 mm (multiple measurement on one segment)
200 to 125 mm (multiple measurement with restrictions on
one segment)
Max. component height 25 mm
Placement force 1- 15N
D-Axis / Resolution direct drive / 0,001 degree
Z Axis / Resolution Linear motor / 0,5 µm
Travel range Z axis app. 60 mm
Nozzle types 5xx (4xx, 8xx, 9xx with adapter)
Distance between the segments approx. 71,00 mm
Max. weight of component 100 g
Option high force TwinHead placement
force
max. 30 N (only X series)
TwinHead
TwinHead Assemblies Overview
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 320
TwinHead Assemblies
9.1.2 TwinHead Assemblies
Vacuum Generator TwinHead
9.1.2.1 Vacuum Generator TwinHead
TwinHead Assemblies
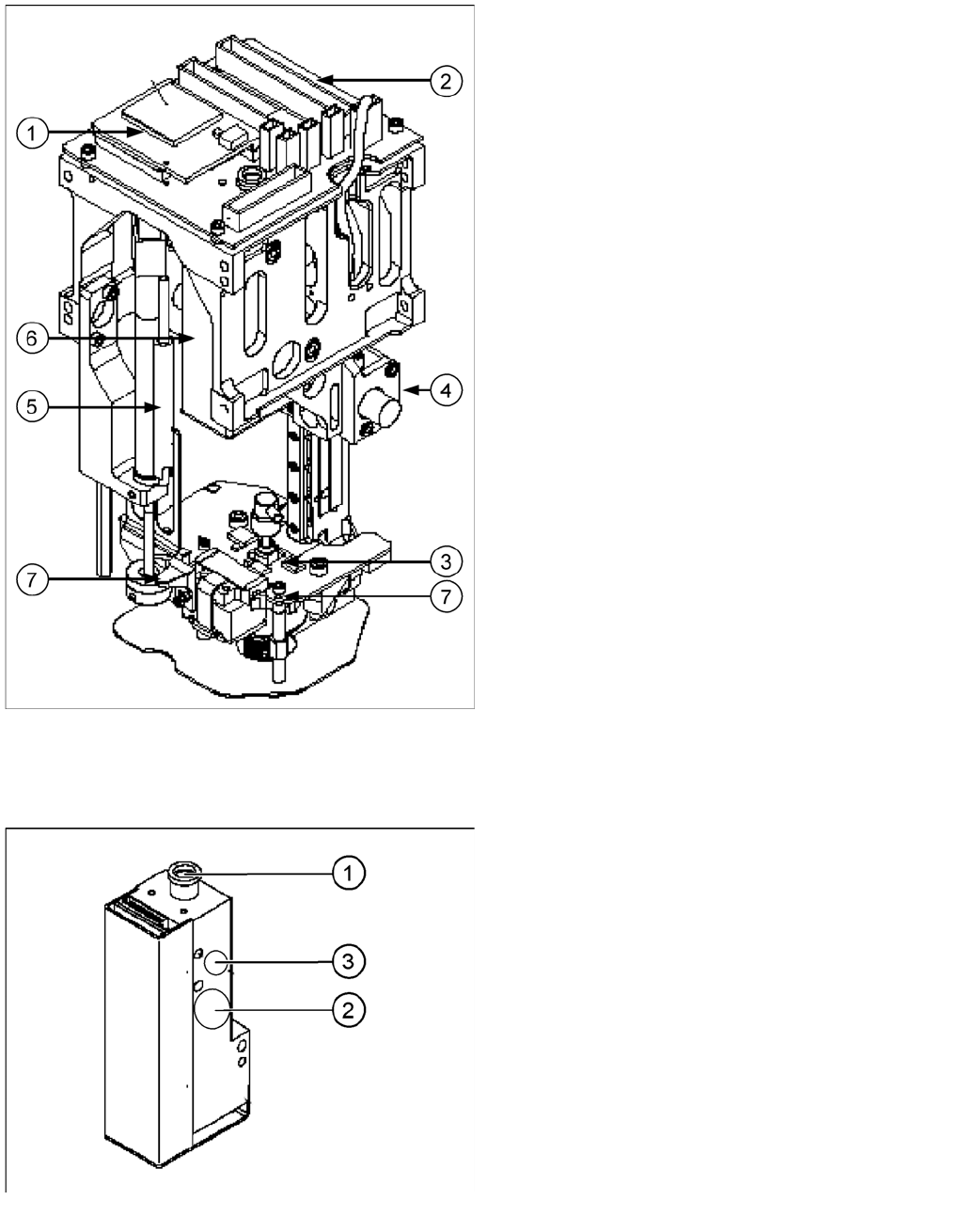
Legend
1. CAN Bus processor board (not mounted, is now on
the head interface C500)
2. TwinHead head board
3. D-axis complete with incremental encoder and force
sensor
4. Encoder Z axis
5. Retract unit to return the Z axis in a safety area in
case of power fail
6. Vacuum generator
7. Actuator for retract unit (right) / screw on the force
measurement board (left).
See also "9.4.3 Manual Lowering of Z Axis" [ ➙ 344].
Vacuum generator
The vacuum generator automatically controls the
vacuum, air blast and the zero balancing position (middle
position-->no vacuum and no air blast) for the segments,
with the aid of an iron core and inductor.
Legend
1. Compressed air input
2. Discharged air from the venturi system
X, SX4 and D3 machines: Discharged air is used for
cooling the X linear motor.
D1/2, SX1/2 machines: Discharged air to the silencer.
3. Output vacuum - vacuum is passed through the D-
axis motor shaft and then to the nozzle.
TwinHead
Overview TwinHead Assemblies
321 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
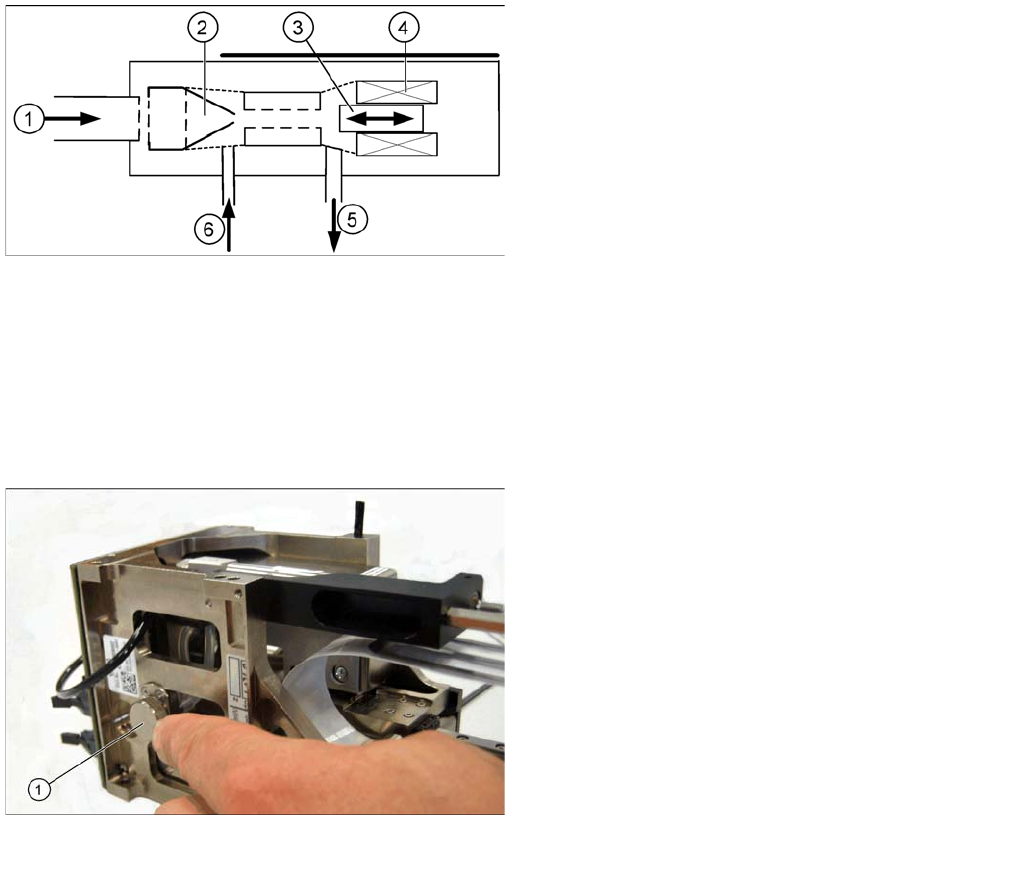
Vacuum Generator Function
After initialization the piston is in a ‘central position’ in which neither vacuum or air kiss is applied to the
nozzle. During pickup the piston is always in the ‘open’ position, in which maximum vacuum is applied
to the nozzle. In the placement cycle the time to switch between maximum vacuum (-850 mbar) to
maximum air kiss (+400 mbar) is < 12ms.
Principle of the vacuum generator
Legend
1. Compressed air input
2. Venturi nozzle
3. Plunger (iron core)
4. Plunger drive (inductor)
5. Discharged air to silencer
6. Vacuum air blast output
Filter for the vacuum system (example of Twin segment
version 03 shown)
Legend
1. Filter for the vacuum system on the Twin- head.
The Filter is mounted on the retract unit and used as an
attenuator to control the vacuum. The filter with the
additional volume reduces the oscillation of the vacuum
generator and guarantees an accurate vacuum and air
blast supply. The filter is serviced at regular intervals,
which must be adhered to (see Maintenance Manual).