00195794-0102_UM_D4_ZH.pdf - 第100页
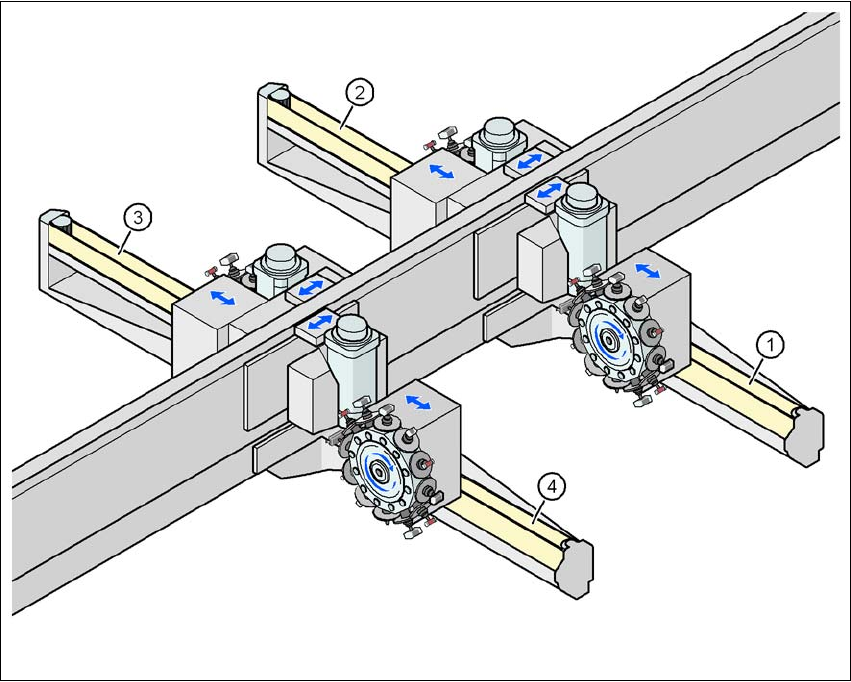
3 贴片机的技术数据 用户手册 SIPLACE D4 3.6 悬臂系统 源自软件版本 SR.605.xx 07/2008 英文版 100 3.6 悬臂系统 3.6.1 悬臂位置 3 图 3.6 - 1 悬臂位置 (1) 悬臂 1 (2) 悬臂 2 (3) 悬臂 3 (4) 悬臂 4 悬臂系统由两个功能组构成: – X 轴 – Y 轴 贴片区 2 贴片区 1
用户手册 SIPLACE D4 3 贴片机的技术数据
源自软件版本 SR.605.xx 07/2008 英文版 3.5 贴片头
99
3.5.1.3 使用真空泵的操作
12 段位器收集贴片头可以进行转换以适应真空泵的操作,从而更有效地制造真空状态 (见第
6.12
节,第 245 页)。
程序设定功率级
1
2
3
4
5
程序设定的贴片力 [N]
2.4 ± 0.5
2.4 ± 0.5
3 + 1
4 + 1
5 + 1
吸嘴类型
9xx 9xx 9xx
X/Y 轴精确度
d
± 50 μm/3σ, ± 67 μm/4σ ± 50 μm/3σ, ± 67 μm/4σ ± 50 µm/3σ, ± 67 µm/4σ
角度精确度
± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ
元件范围
98% 98.5% 96%
元件照相机类型
28 29 38
照明级别
555
可能的照明级别设置
256
5
256
5
256
5
a) 请注意,可以放置的元件范围还会受到衬垫几何形状、客户特定的标准和封装公差的影响。
b) 带有 0201 封装
c) 带有 01005 封装
d) 精确值可使用与厂商无关的 IPC 标准测量得出
3 贴片机的技术数据 用户手册 SIPLACE D4
3.6 悬臂系统 源自软件版本 SR.605.xx 07/2008 英文版
100
3.6 悬臂系统
3.6.1 悬臂位置
3
图
3.6 - 1
悬臂位置
(1) 悬臂 1
(2) 悬臂 2
(3) 悬臂 3
(4) 悬臂 4
悬臂系统由两个功能组构成:
– X 轴
– Y 轴
贴片区 2
贴片区 1
用户手册 SIPLACE D4 3 贴片机的技术数据
源自软件版本 SR.605.xx 07/2008 英文版 3.6 悬臂系统
101
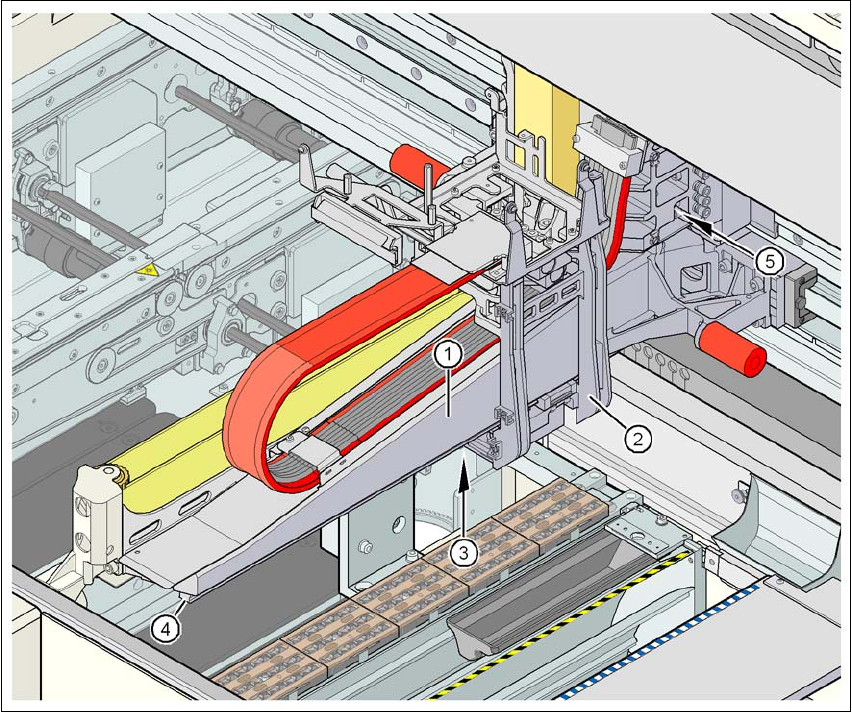
3.6.2 X 轴结构
3
图
3.6 - 2 X
轴结构
X 轴主要由以下主要组件构成:
–悬臂 (1)
– 贴片头座 (2)
– 线性测量系统 (3)
– X 轴导向系统 (4)
– X 轴三相交流伺服马达 (5)
贴片头座装有下列元件:
– 副悬臂照相机 (用于 PCB 视像组件的照相机)
– 贴片头控制板
–用于 X 轴测量系统的测量头
–收集& 贴片头