JM-20使用说明书.pdf - 第309页
第 1 部 基本篇 第 2 章 生产 2- 191 按照 以下时 序,中断监视动作。 所谓 圆型供料器 监视重开, 是指圆型供料 器 的马达开始 动作。 圆型供料器监视中断时刻 生产 结束时 ( 返回初始 画面时) 生产暂停时 错误暂停时 生产 异常结束时 发生非 同步事 象时 紧急 停止、伺服报警 、轴的 极限错误 等 PO WER MON IT OR 时(仅限 EN 机) ◇监视动作 对于圆型供料器轨道,传感器为 ON 状态(产品堵…
第 1 部 基本篇 第 2 章 生产
2-190
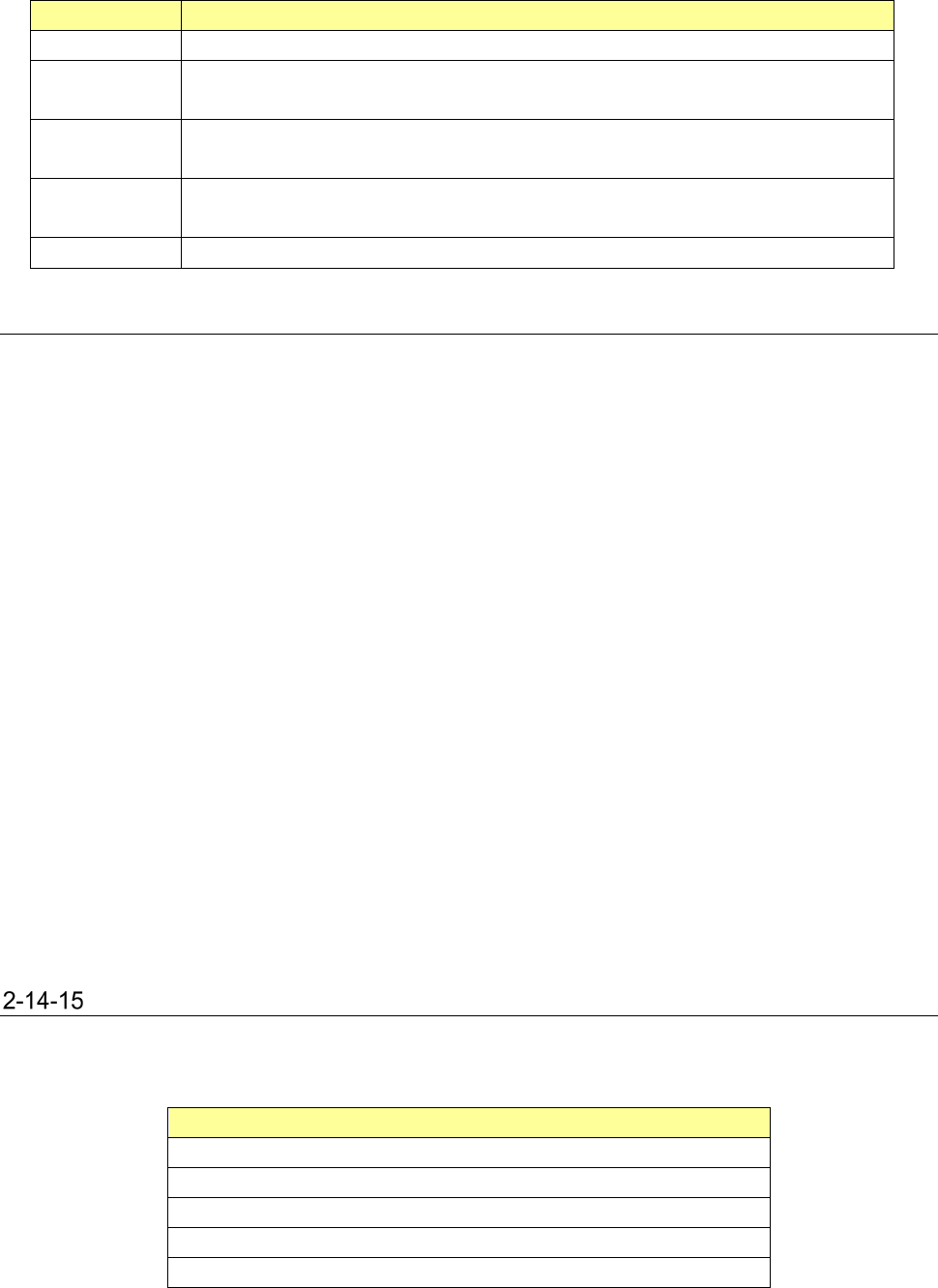
显示
内容
图像数据中定义的顺序等于元件(元素)组编号。
横分割 如果分割识别间距(横方向)的实际移动量与生产程序不同,即按照与指定量
的差进行输出。
纵分割 如果分割识别间距(纵方向)的实际移动量与生产程序不同,即按照与指定量
的差进行输出。
距离 如果通用图像元件中元件(元素)组之间的距离与生产程序中指定的距离差别
很大时,则输出与该距离的差。
边
角度
检测出角度错误时的角度差。
2-14-14-3 其它识别错误
如果元件类型为插入元件,发生其他识别错误、不能分配的识别错误时,也请确认以下项目。
1. 引脚前端发黑
如果引脚前端不光亮,无法图像处理而发生错误。
请使用前端光亮的元件。
2. 引脚过于弯曲
引脚过于弯曲,前端不光亮时,无法识别图像。(连引脚弯曲都无法判定)
请确认元件的引脚没有弯曲。
另外,由于引脚弯曲,引脚前端离旁边的引脚太近时,也无法识别图像。
(在引脚弯曲判定前会发生无法图像识别错误)
间距窄的元件容易发生这种情况。
请确认元件的引脚没有弯曲。
3. 夹持吸嘴上的元件浮动
在夹持吸嘴上无法正确把持时,会发生识别错误。元件浮动1.5mm左右即无法识别。
这时,由于元件向摄像机靠近,引脚前端有时有看上去较大的倾向,容易发生错误。
请确认元件的把持状态。
圆型供料器监视功能
使用圆型供料器生产时,圆型供料器的监视功能自动工作。
按照以下时序,开始监视动作。所谓监视动作中断,就是指圆型供料器的马达停止。
圆型供料器监视重开时序
生产开始时
从暂停生产重开时
从重试列表重开时
开始继续生产时
原点复位后的生产重开时
第 1 部 基本篇 第 2 章 生产
2-191
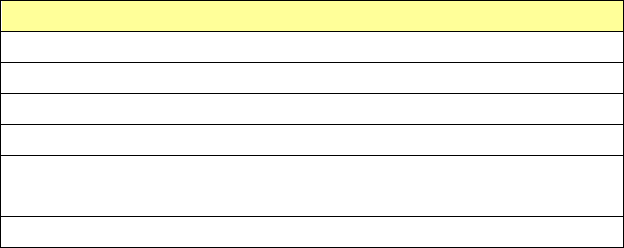
按照以下时序,中断监视动作。所谓圆型供料器监视重开,是指圆型供料器的马达开始动作。
圆型供料器监视中断时刻
生产结束时(返回初始画面时)
生产暂停时
错误暂停时
生产异常结束时
发生非同步事象时
紧急停止、伺服报警、轴的极限错误等
POWER MONITOR
时(仅限
EN
机)
◇监视动作
对于圆型供料器轨道,传感器为ON状态(产品堵塞在前端),且Ready/Busy传感器(位于前端的
传感器)为ON状态(产品在供应位置状态)时,该圆型供料器轨道为满料状态。
对于1台马达,所使用轨道全部为满料状态时,圆型供料器的马达动作停止。
在满料状态吸取元件时,因Ready/Busy传感器(位于前端的传感器)为OFF状态,所以马达开始动
作。
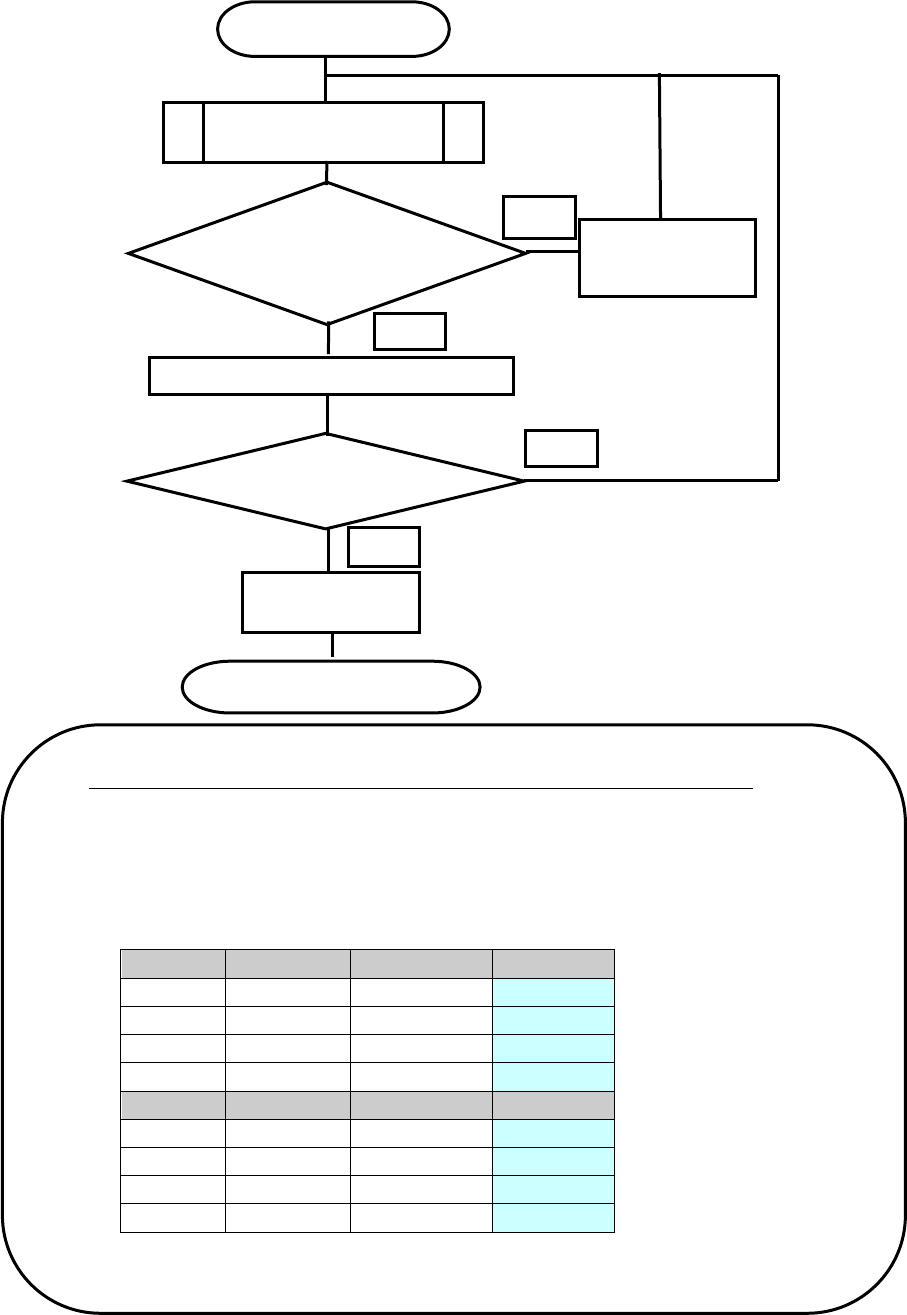
生产中监视动作的流程如下。
第 1 部 基本篇 第 2 章 生产
2-192
监视动作开始
路径传感器・
Ready/Busy
取得状态
圆型供料器马达动作开始
Yes
NO
中断指令(暂停等)
NO
Yes
圆型供料器
马达动作停止
监视动作结束
圆型供料器
马达动作停止
*动作监视示例:使用孔编号
1
号的通道
1
、通道
2
、通道
5
、通道
6
时
通道 1 为满料状态,且通道 2 为满料状态时,停止圆型供料器 LL 的马达动作。
通道 5 为满料状态,且通道 6 为满料状态时,停止圆型供料器 LR 的马达动作。
此外的情况下,各马达动作。
对应各轨道状态的马达状态关系如下。
通道
1
通道
2
马达
LL
状态
a
未完成
未完成
动作
状态
b
满料
未完成
动作
状态
c
未完成
满料
动作
状态
d
满料
满料
停止
通道
5
通道
6
马达
LR
状态
a
未完成
未完成
动作
状态
b
满料
未完成
动作
状态
c
未完成
满料
动作
状态
d
满料
满料
停止
满料…圆型供料器通道为满料状态
路径传感器 ON 且
Ready/Busy ON