JM-20使用说明书.pdf - 第853页
第 2 部 功能详 解篇 第 9 章 手动 控制 9-2 9- 2 手动控制 的启动与退出 9-2- 1 启动手动控制 在菜单栏上点击「设置」 → 「 手动控制」 , 或从画面下方的功能栏点 击「手动控制」 ,画面上会显示 下图所示的手动控制 初始画面。 初始画面内显示各单 元的构成图。点击 画面上设置的 按钮,可启动与各按 钮相对应的设置画 面。 机器设置中有被设置 为不使用的设备时 ,会出现如 下信息。 点击 [ 是 ] ,或 在 …
第 2 部 功能详解篇 第 9 章 手动控制
9-1
第
9
章
手动控制
9-1 概要
手动控制,是指为了确认各部位的运行、或检查传感器ON/OFF(开、关)的项目。
使用的主要功能有基板的准备(请参见「2-7-1 基板的设置」)、Head的移动、激光的确认等。另
外,还可检查LED是否发生故障(一边使其点亮、灭灯,一边进行检查)。
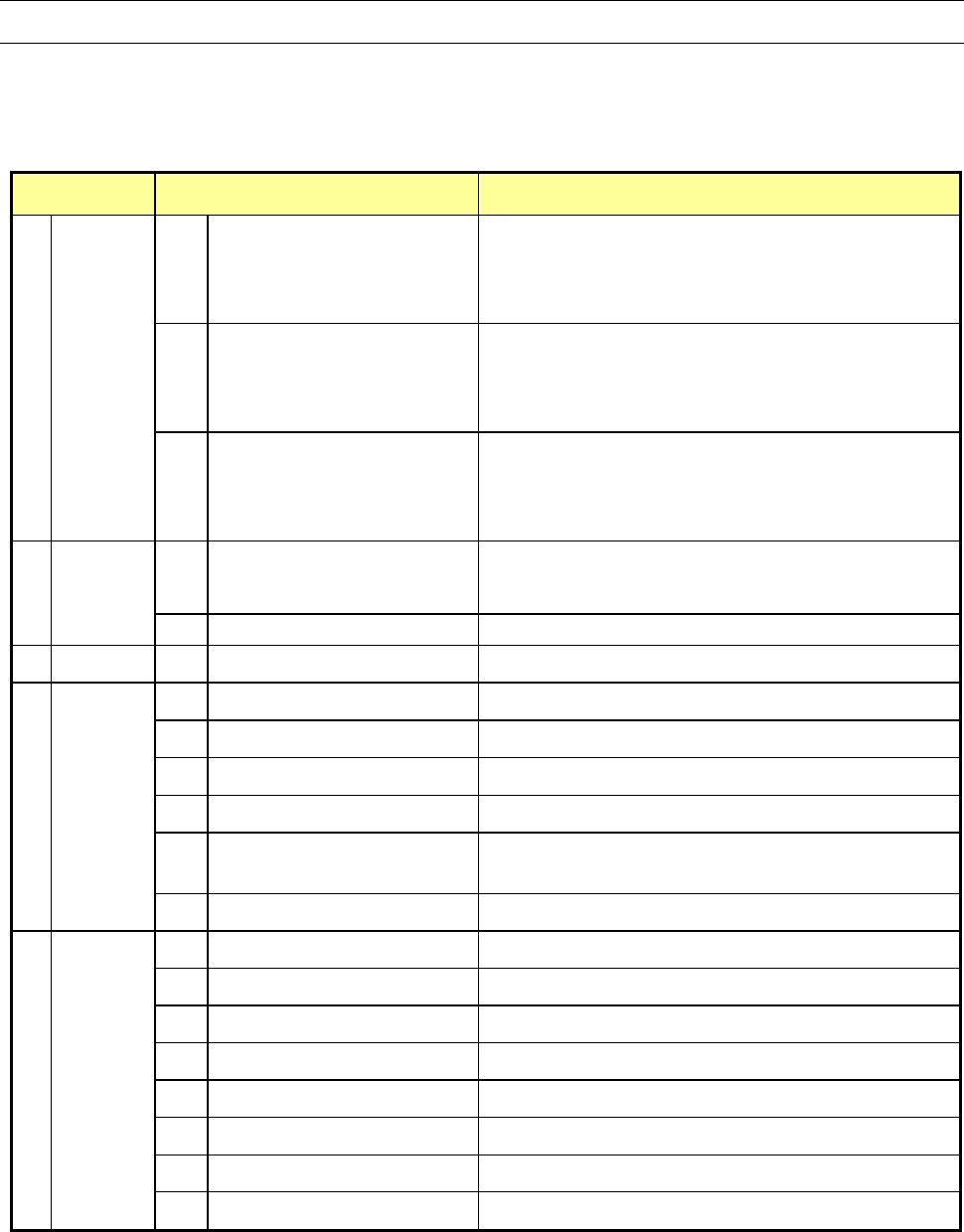
主菜单
子菜单
内容
1
Head
1 Head 控制
以各 Head 为基准的 XY 轴移动控制、坐标显示。
各 Head 的 Z、θ 轴移动控制、坐标显示
各
Head
的真空控制、吹气控制、压力值显示
2 Head 设备控制
以各 Head 装置(OCC、HMS)为基准的 XY 轴移动
控制、坐标显示
各
Head
装置的控制、传感器状态显示
3 激光控制
各 Head 的真空控制、真空开/关显示
各 Head 的 Z 轴移动控制、坐标显示
元件形状切换、测量、结果显示、图像表示
2
传送
1 传送控制
基板传送、自动调整基板宽度、传送马达控制、
支撑台控制、信号的状态显示、挡块
2
基板条形码阅读器控制
条形码控制、自动识别搬送控制
3
图像 1 VCS 控制
照明控制、状态显示、照明设备气缸控制
4
供给装置
1
送料针控制
送料针控制
2
MTS 控制
托盘控制、状态显示
3
DTS 控制
托盘控制、状态显示
4
径向/轴向送料器控制
径向/轴向送料器的带料传送控制、夹紧动作控制
5
圆型送料器控制
显示圆型供料器的马达控制、吹气控制、圆型供料
器状态
6
管状供料器
显示振动式管状供料器的真空控制、传感器状态
5
其他
1 ATC 控制 ATC 滑板控制、传感器状态显示、吸嘴吸取控制
2
信号灯控制
信号灯控制、警报器控制、状态显示
3
校准台控制
LED
控制、真空控制、状态显示
4
真空泵控制
真空泵控制
5
其他传感器
IC
元件废弃传送带停止传感器等的状态显示
6
驱动器状况
X
、
Y
、
Z
、
θ
轴驱动器的状态显示
7
伺服状态
伺服状态显示
8 显示空气压力
显示空气压力
第 2 部 功能详解篇 第 9 章 手动控制
9-2
9-2 手动控制的启动与退出
9-2-1 启动手动控制
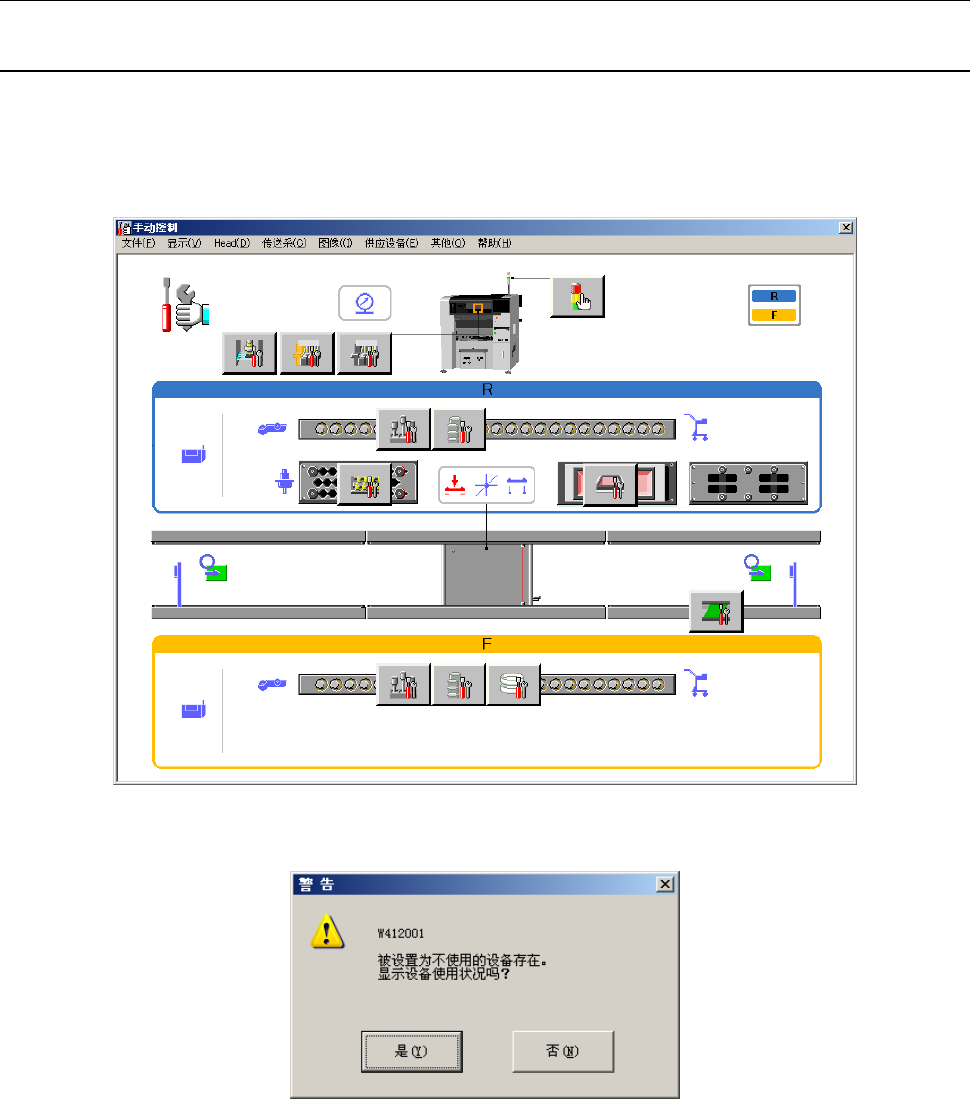
在菜单栏上点击「设置」→「手动控制」,或从画面下方的功能栏点击「手动控制」,画面上会显示
下图所示的手动控制初始画面。
初始画面内显示各单元的构成图。点击画面上设置的按钮,可启动与各按钮相对应的设置画面。
机器设置中有被设置为不使用的设备时,会出现如下信息。
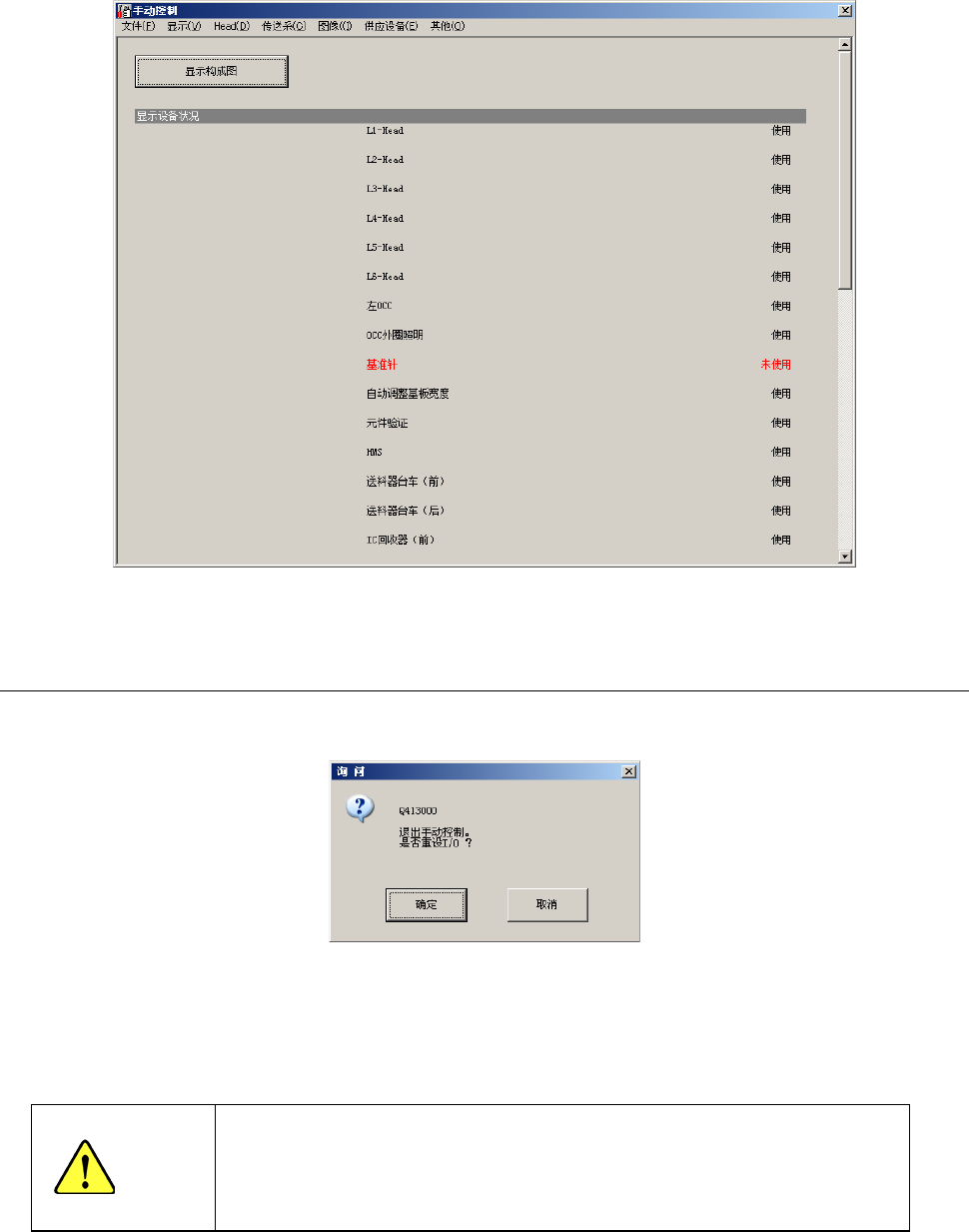
点击[是],或 在 初始画面的下拉菜单中依次点击[显示]-[显示设备使用状况]后,画面会切换为以下画
面。
第 2 部 功能详解篇 第 9 章 手动控制
9-3
点击[显示构成图]、或选择菜单栏的「显示」→「显示构成图」,即可返回到初始画面(构成图)。
9-2-2 退出手动控制
依次点击菜单栏中的[文件]-[退出],或按下画面右上方的关闭按钮[×],或按下工具栏中的退出按钮,
可退出手动控制。
「确定」:执行I/O安全方向设置后退出。例如,Head带有吸嘴时,将吸嘴放回ATC后,再退出
手动控制画面。
「取消」:返回手动控制画面。
选择「确定」后,轴会移动并开始执行各 I/O 的安全方向设置。
在选择「确定
」前,请务必确认无人在进行装置内部的作业。此外,为了
避免人身伤害,在运行过程中,切勿将手放入装置内部,也不要将脸和头
靠近装置。
警告