JM-20使用说明书.pdf - 第869页
第 2 部 功能详 解篇 第 9 章 手动 控制 9- 18 元件形状 动 作 用 途 Config3 根据测量数据计算吸 取角度位置偏差, 实施 补正 , 然后贴片。 与 Config2 动作相同,但忽略 识别结果的角度。 没有角的圆筒元件 Config4 使用元件的重心,计 算元件幅宽、位置 偏差量。 使用元件的 1 边计算角度。 对 JM-10 中的元 件形状,与 flexibl e3 近似的元 件识别方法。在 JM-10 的 f…
第 2 部 功能详解篇 第 9 章 手动控制
9-17
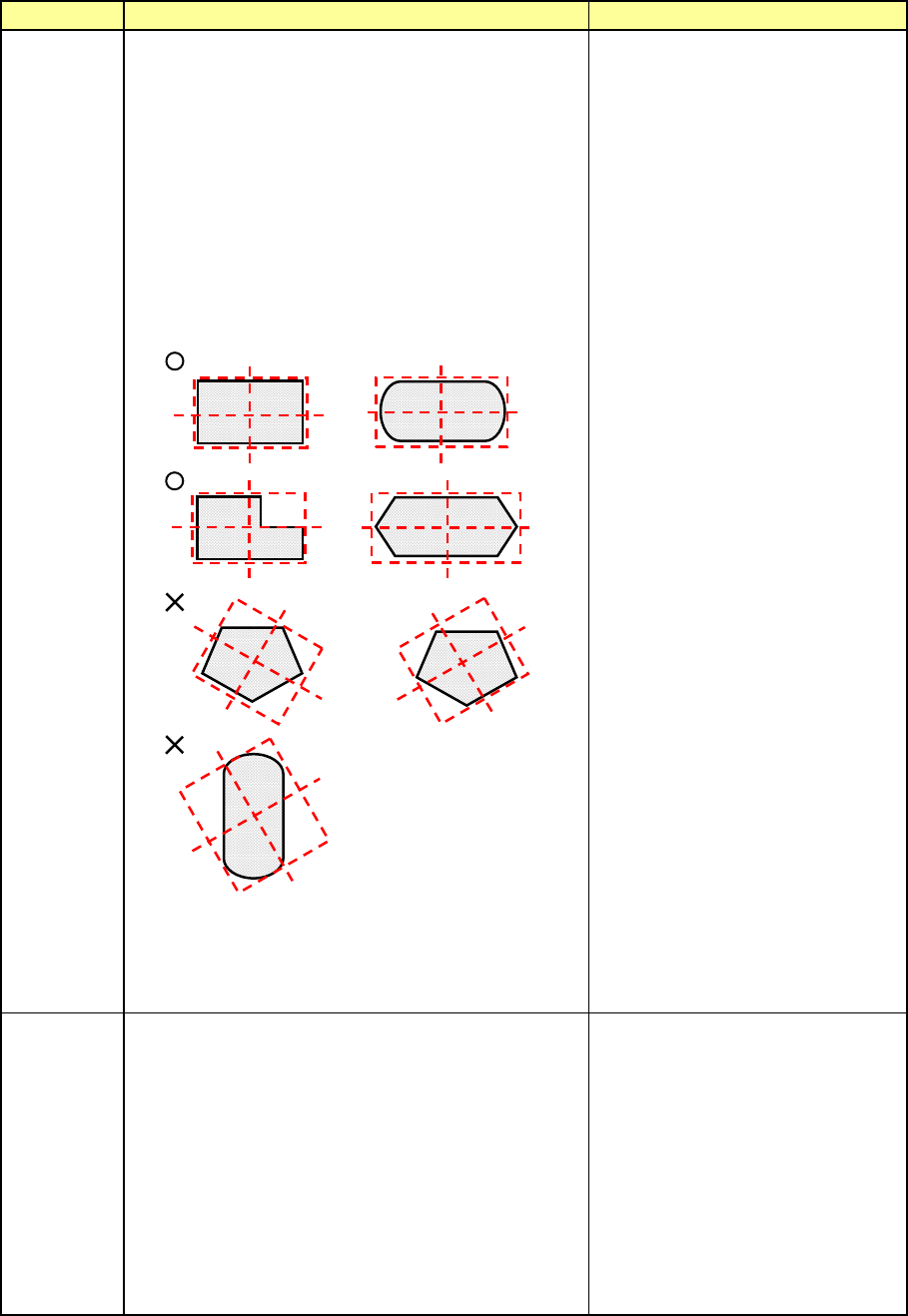
选择各种元件形状时的动作如下。
·元件形状和 SWEEP 动作
元件形状
动 作
用 途
Config1
针对元件检测出外接接线,以最小四边形界定外
接接线,对位置偏差、角度偏差进行计算、补正
,
然后实施贴片。
为了计算四边形界定区域的位置偏差
、角度偏差,
使用形状近似正方形以及长方形的元件。
即使是包含圆角的元件,也可以识别出在直线位
置下的元件。若下部位置为圆形时,因为角度不
确定,无法识别。
为多边形时,无法明确界定外接四边形,所以无
法稳定识别。
形状近似正方形、长方形的元件
Config2
Config1 无法识别,使用多边形元件。
在计测过程中元件旋转时,光照到元件的影幅发
生变化。按照该影幅的变化量计算元件的位置偏
差、角度偏差。
在最开始,找到影幅最小的点 (第一最小点),之
后继续旋转元件 ,找 到 下一影幅最小点(第二最小
点)。根据这 2 点,计算出元件的位置偏差、角度
偏差。
因为是以影幅计算位置偏差、角度偏差,所以为
不易受元件外形影响的识别方法。
Config1 无法识别的异形元件
或
第 2 部 功能详解篇 第 9 章 手动控制
9-18
元件形状
动 作
用 途
Config3
根据测量数据计算吸取角度位置偏差,实施补正
,
然后贴片。
与 Config2 动作相同,但忽略识别结果的角度。
没有角的圆筒元件
Config4
使用元件的重心,计算元件幅宽、位置偏差量。
使用元件的 1 边计算角度。
对 JM-10 中的元件形状,与 flexible3 近似的元
件识别方法。在 JM-10 的 flexible3 中不能指定
元件的 1 边,但 JM-20 的 Config4 可以指定。
指定在「Config4 基准角度」中进行设置。
使用 Config1 及 Config2,也不
能按照意图角度进行贴片的异形
元件
Config5
在对象元件的计测部位有引脚等间隙时使用。
与 Config1 的动作相同,但存在间隙时会漏光造
成噪音,追加了消除噪音的动作。
JM-20 时,即使选择 Config1 也有与 Config5 动
作相同的元件种类 (插入元件、INS 电解电容器
等)。此 Config 是为了与其他机型保持互换性而
追加的。在 JM-20 无需刻意选择 Config5。
线圈、中空的检查端子、LED
(2) 插入元件
计测(SWEEP)插入元件时,请检查项目。
(3) 元件角度(Config4 基准角度)
对希望计测(SWEEP)的元件,在与本来希望计测的角度存在偏差时使用。
指定了 Config4 时,此 项目变化为 Config4 基准角度。有关 Config4 基准角度,请参照「4-3-5-2-3
定心」。
第 2 部 功能详解篇 第 9 章 手动控制
9-19
9-4-3-6 控制项目:变幻线
通过计测(SWEEP)获得的数据显示变换线(元件的轮廓)。
变幻线能够显示的元件有方形芯片、方形芯片(LED)、圆筒形芯片、SOT。
选中控制项目的[变换线]时,可选择[执行(E)]按钮,或按[F3]键控制。
变换线示例请参见下表。
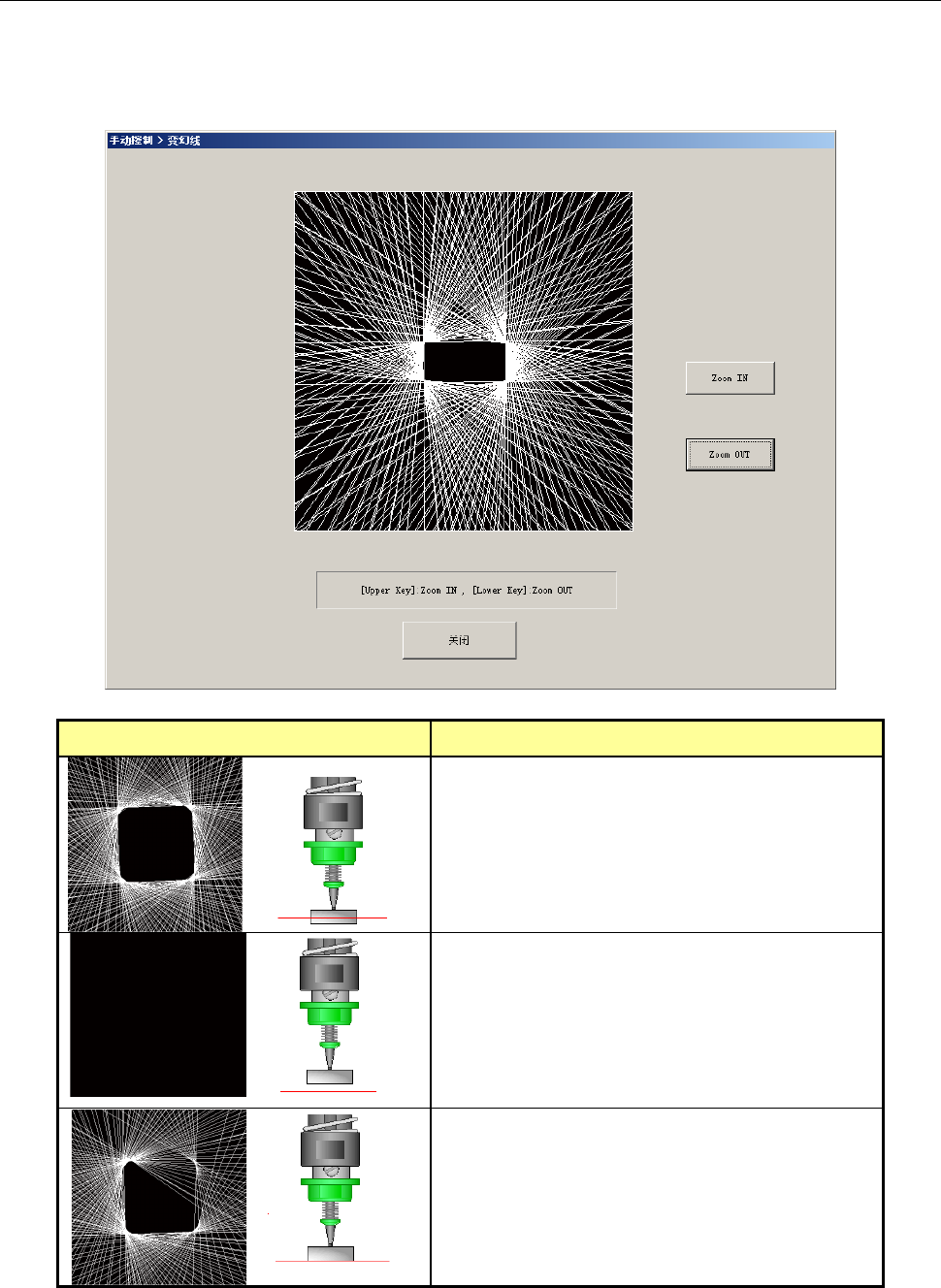
变换线和激光高度
说明
激光高度适当。取得的元件形状正确。
取得形状后,激光传感器返回 SWEEP
识别结果。
激光面上没有元件,因得不到一个边缘数据,无
法描绘变换线,画面呈黑色。
激光传感器 SWEEP 失败,返回信息为无元件错
误。
激光高度在元件下面附近时,不能全面遮盖激光
面,有些边缘数据没有取得,所以变换线形状变
形,激光传感器 SWEEP 识别失败,返回错误信
息。