CM602 操作维修手册.pdf - 第253页
CM602-L 维修手册 2.1 关于机器参数 Page 2-7 (2/7) No. 参数名 设定为 [ 有 ] 时 设定为 [ 无 ] 时 ( 默认值 ) 10 ‘ 吸嘴直径错误检测 ’ 运转开始时检查安装在 吸头上的吸嘴的直 径,当其不良时将会停 止运转。 如果吸嘴直径不良,虽 然将会显示确认信 息,但可以选择继续运 转。 11 ‘ 吸着位置自动示教 ’ 对于小型芯片, 自动运行 开始时自动进行洼 坑的识别、并补正吸着 位置。 不进…
CM602-L
维修手册
2.1
关于机器参数
Page 2-6
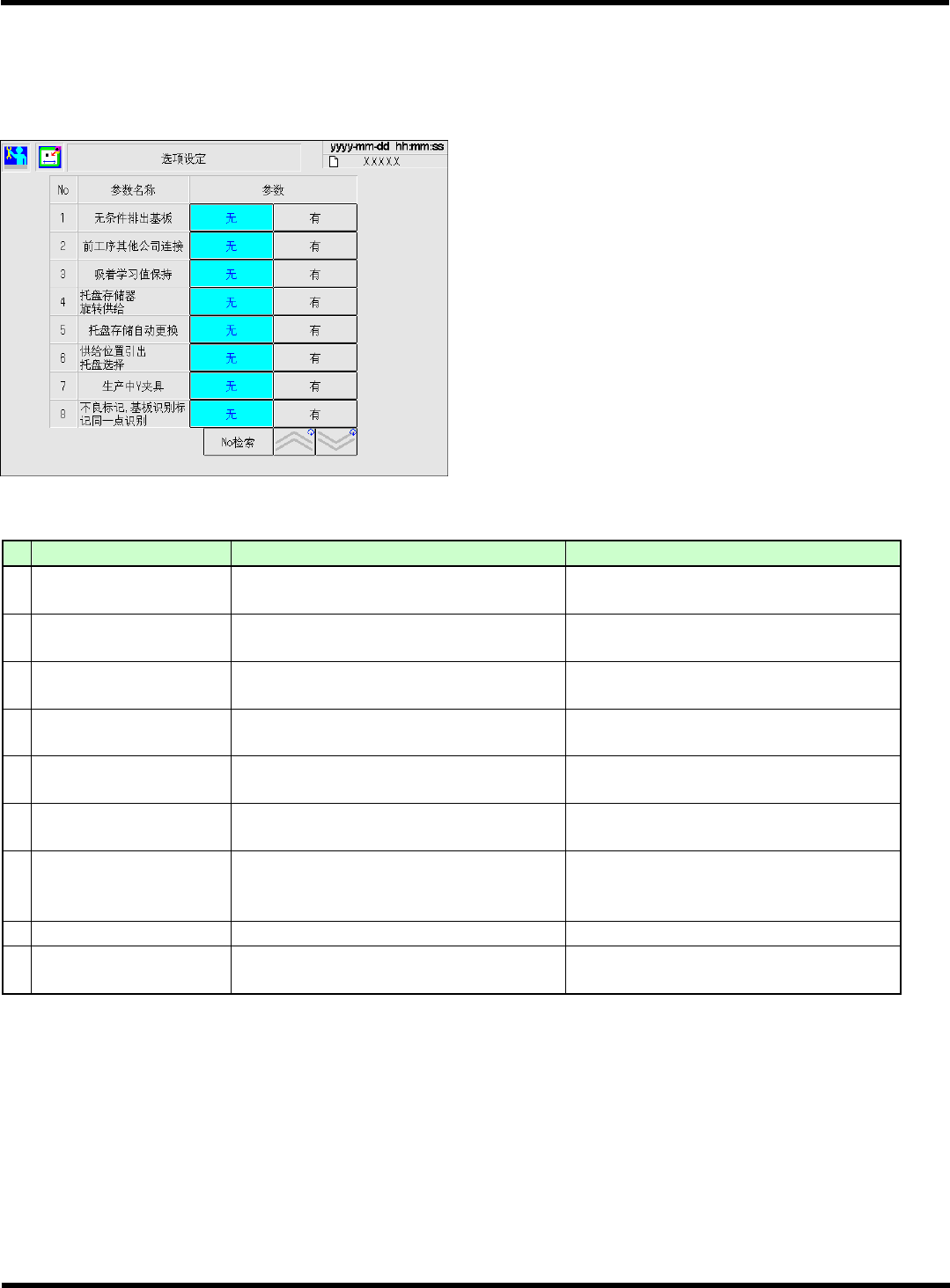
1. [
功能使用设定
]
参数名一览
∗
在此说明中根据规格的不同而显示出来的参数名称包括在内,列出所有参数名称。
(
参考画面
)
(1/7)
No.
参数名
设定为
[
有
]
时
设定为
[
无
]
时
(
默认值
)
1
‘
无条件排出基板
’
无论有无从后工序传来的要求信号,都将基
板搬出。
等待从后工序传来的要求信号后,再将基板
搬出。
2
‘
前工序其他公司连接
’
传送带入口的传感器检测到基板后,关闭向
前工序发出的要求信号。
待机部的传感器检测到基板后,关闭向前工
序发出的要求信号。
3
‘
吸着学习值保持
’
切换机器种类而不交换供料器时,保持此前
的吸着位置的学习值。
机器种类一经切替,无条件地复位吸着学习
值。
4
‘
单轨模式
’
(
限双重机器
)
将双轨机器作为单轨而使用。
以固定轨道为基准进行动作。
作为双轨进行动作。
5
‘托盘存储器旋转供给’
(
仅限于有托盘的机器
)
发生部品用完后,存储的托盘板将按顺序进
给。
部品用完后,如果第一枚供给完成时,则移
动到第一枚托盘板上。
6
‘
托盘存储自动更换
’
(
仅限于有托盘机器
)
托盘板工件用完时,将下部的存储托盘板移
动到该位置上。
不进行如左所述的动作。
7
‘
供给位置引出
托盘选择
’
(
仅限于有托盘机器
)
可任意选择在生产运转中拉出到补给部的
托盘。
不能任意选择在生产运转中拉出到补给部
的托盘。
8
‘
生产中
Y
夹具
’
在生产过程中向水平方向也夹紧基板。
在生产过程中仅限于垂直方向夹紧基板。
9
‘
不良标记,基板识别标记
同一点识别
’
在同一坐标上进行不良标记检查和基板
A
点的识别。
完成不良标记检查之后,移动到基板识别
A
点进行基板识别。
下一页
EJM8A-C-MMC02-A01-01
EJM6A-Mp-0134
CM602-L
维修手册
2.1
关于机器参数
Page 2-7
(2/7)
No.
参数名
设定为
[
有
]
时
设定为
[
无
]
时
(
默认值
)
10
‘
吸嘴直径错误检测
’
运转开始时检查安装在吸头上的吸嘴的直
径,当其不良时将会停止运转。
如果吸嘴直径不良,虽然将会显示确认信
息,但可以选择继续运转。
11
‘
吸着位置自动示教
’
对于小型芯片,自动运行开始时自动进行洼
坑的识别、并补正吸着位置。
不进行如左所述的补正。
12
‘
传送带宽度保存
’
电源接通时不清除传送带的宽度,把电源切
断时的宽度设定为初始值。
电源一被切断,传送带宽度有可能发生微小
的变化。
电源接通时,清除传送带宽度的初始值。
13
‘
全区块不良基板通过
’
根据不良标记识别,判定全部区块均为不良
(
不予实装
)
时,将基板排出。
根据不良标记识别,判定全部区块均为不良
(
不予实装
)
时,暂时停止工序。
14
‘
编带进给开始确认
’
自动运转开始时和部品供给时使之发生编
带进给错误。
(
将它视为部品用完状态
)
不发出如左所述的错误,而将其视为部品用
完状态。
使用
NAVI
的用户不能通过编带进给错误完
成供给操作,因此请设定成
[
无
]
。
15
‘
吸着错误计数编带进给开
始
’
将编带进给时的吸着错误信息反映到生产
信息中。
不进行如左所述的处理。
16
‘
吸着错误计数部品用完
’
将工件用完时的吸着错误信息反映到生产
信息中。
不进行如左所述的处理。
17
‘
反面实装
’
通过传感器确认基板支座下降之后,再排出
基板。
不进行如左所述检查。
18
‘
生产数据反面实装
’
∗
1
在数据修正的软开关设定画面中可以设定
是否进行
‘
反面实装
’
的动作。通过对每个生
产数据分别切换反面实装的动作,可以减少
搬送的时间损失。当将选项设定的
‘
反面实
装
’
设为
[
有
]
时,不能使用此项。如果将反面
实装设定有错误,则当搬送时有可能造成支
撑销和实装在反面的部品发生干涉,请注
意。
在数据修正的软开关设定画面中不能切换
‘
反面实装
’
的动作。
19
‘1
枚生产中热补正
’
在
1
枚生产工序中,当达到
100
转时将会进
行热补正识别。
不进行如左所述识别。
20
‘
实装前排出
NG
部品
’
在实装前排出被判定为吸着错误或识别错
误以及引线浮起的部品。
不进行如左所述识别。
21
‘
吸着学习供料器原点补
正
’
把
Y
方向的吸着学习值当作原点偏移量设
置到供料器上。
对供料器设置原点偏移量,即可提高同时吸
着率。
不进行如左所述动作。
∗
1
: 为了通过使用
‘
生产数据反面实装
’
的功能来切换每个生产数据的反面实装设定的有或无,需要
PT200
的
选购件功能。
下一页
EJM8A-C-MMC02-A01-01
CM602-L
维修手册
2.1
关于机器参数
Page 2-8
(3/7)
No.
参数名
设定为
[
有
]
时
设定为
[
无
]
时
(
默认值
)
22
‘芯片排出后吸嘴认识’ 排出芯片后,进行吸嘴认识
(
芯片认识
)
。 不进行如左动作。
23
‘
前工序排出准备等待
’
即使已变成可接收基板的状态,在收到前工
序的排出信号之前不会发出要求信号。
只要处于可接收基板的状态,将会无条件地
向前工序发出基板要求信号
。
24
‘
遥控生产开始
’
(
限远程操作对应机器
)
限远程操作特殊规格时将会显示。
以外部的信号输入,将开始自动运转。
不进行如左所述的动作。
25
‘
遥控单一停止
’
(
限远程操作对应机器
)
限远程操作特殊规格时将会显示。
以外部的信号输入,将单独停止。
不进行如左所述的动作。
26
‘LM
信息有
’
(
限远程操作对应机器
)
限远程操作特殊规格时将会显示。
在机器上显示从
LM
操作板来的平常要显示之
项目、错误指示项目等。
不进行如左所述的动作。
27
‘
后工序生产结束信号输
出
’
向后工序机器输出生产结束信号。
向后工序机器不输出生产结束信号。
28
‘
部品用完状态保持
’
当结束自动运转时,将会保持用完部品状
态,以后再进入自动运转时,不会到用完部
品的供料器吸着。
当结束自动运转时不会保持用完部品状态,
并以后再开始自动运转时,将会到用完部品
的供料器吸着。
29
‘
安装供料器时吸着位置
示教
’
由于用完部品或暂时停止等原因而拔插供
料器后,将会进行吸着位置自动示教。
不进行如左所述的动作。
30
‘
编带进给后吸着位置
示教
’
在拔插后的最初吸着时,进给编带之后示教
吸着位置。
在进给编带之前示教吸着位置。
31
‘
拼接后吸着位置示教
’
在拼接后吸着时示教吸着位置。
不进行如左所述的动作。
32
‘
前工序其他公司连接
’
(
等待传感器
OFF)
通过顶端传感器检测基板
(
传感器
ON)
,当
确认基板通过时
(
传感器
OFF)
,要求信号
将被切断。
通过顶端传感器检测基板
(
传感器
ON)
,当
将基板搬入到待机部时,要求信号将被切
断。
33
‘
不良标记识别前基板识
别
’
在不良标记识别前进行基板识别。
先进行不良标记的识别。
34
‘
检测吸着位置偏移
’
吸着位置偏移如果超过容许范围,会发生错
误停止。
不检测吸着位置偏移。
35
‘
基板厚度测量
’
检测基板厚度,并确认基板厚度的数据输入
是否正确。
不进行如左所述的动作。
36
‘
拔出后传送带的基板
’
(
仅限于有后延长传送带
)
如果基板被存储在后传送带上的状态下拔
除基板,就会识别到被拔除,并搬出下一个
基板。
不能进行如左所述的动作。
(
发生搬送错误。
)
下一页
EJM8A-C-MMC02-A01-01