CM602 操作维修手册.pdf - 第273页
CM602-L 维修手册 2.1 关于机器参数 Page 2 -27 2.1.11 照相机 a. ‘ 芯片识别相机 偏移量 ’ 显示芯片识别照相机的 位置和倾斜度。 ‘ 正扫描 ’ 用于芯片识别位置的补 正以及芯片识别的计算。 ‘ 逆向扫描 ’ 是芯片识别逆向扫描时 的偏移量。 用于逆向扫描时的芯片 识别的计算。 b. ‘ 倍率 ’ ‘ 芯片识别相机 ’ 显示芯片识别相机的像 素率。 在计算芯片识别时使用 。 ‘ 基板识别相机 ’ 显示…
CM602-L
维修手册
2.1
关于机器参数
Page 2-26
b. ‘
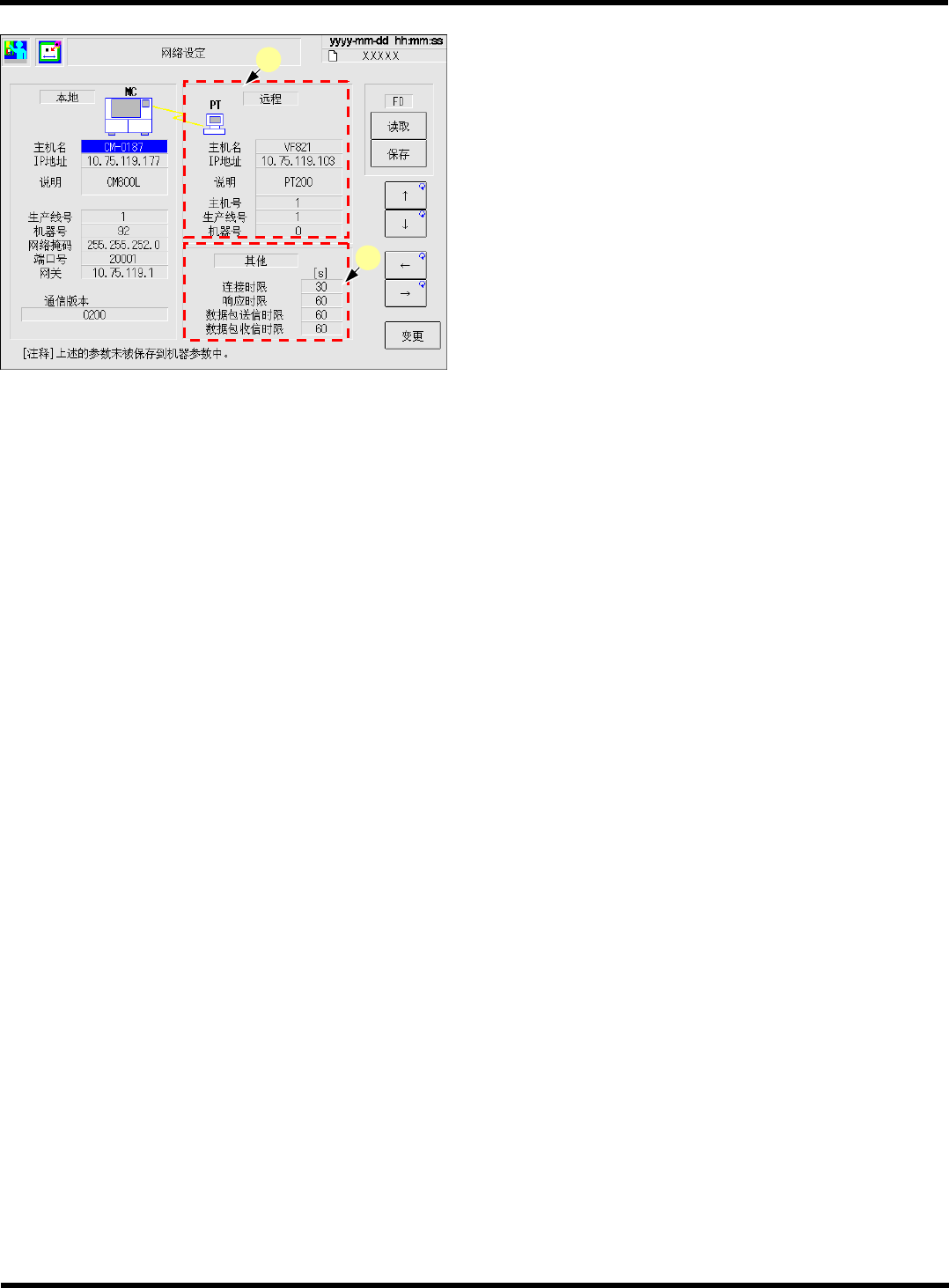
远程
’
‘
主机名
’
与该贴装机连接的上位主机
(PT)
的贴装机网
络上使用的名称。
‘IP
地址
’
各机器是用
TCP/IP
进行通信的。
IP
地址是为了用
TCP/IP
连接网络,对各机器给
予的固定地址。
‘
主机号
’
是对各上位主机
(PT)
给予的固定号码
(01 ~
FE)
。该贴装机通常是
“00”
。
‘
生产线号
’
对与该贴装机连接的
PT
来管理的贴装机生产线
给予的生产线固有号码
(01 ~ FE)
。
c. ‘
其他
’
‘
连接时限
’
从该贴装机上发出的通信要求在与
PT
连接之前
的时限。
‘
响应时限
’
通信连接之后直到接收应答为止的时限。
‘
数据包送信时限
’
传送机器数据等文件时的每
1
个数据包的时限。
‘
数据包收信时限
’
接收机器数据等文件时的每
1
个数据包的时限。
EJM8A-C-MMC02-A01-01
EJM4A-Mp-0018
b
c
CM602-L
维修手册
2.1
关于机器参数
Page 2-27
2.1.11
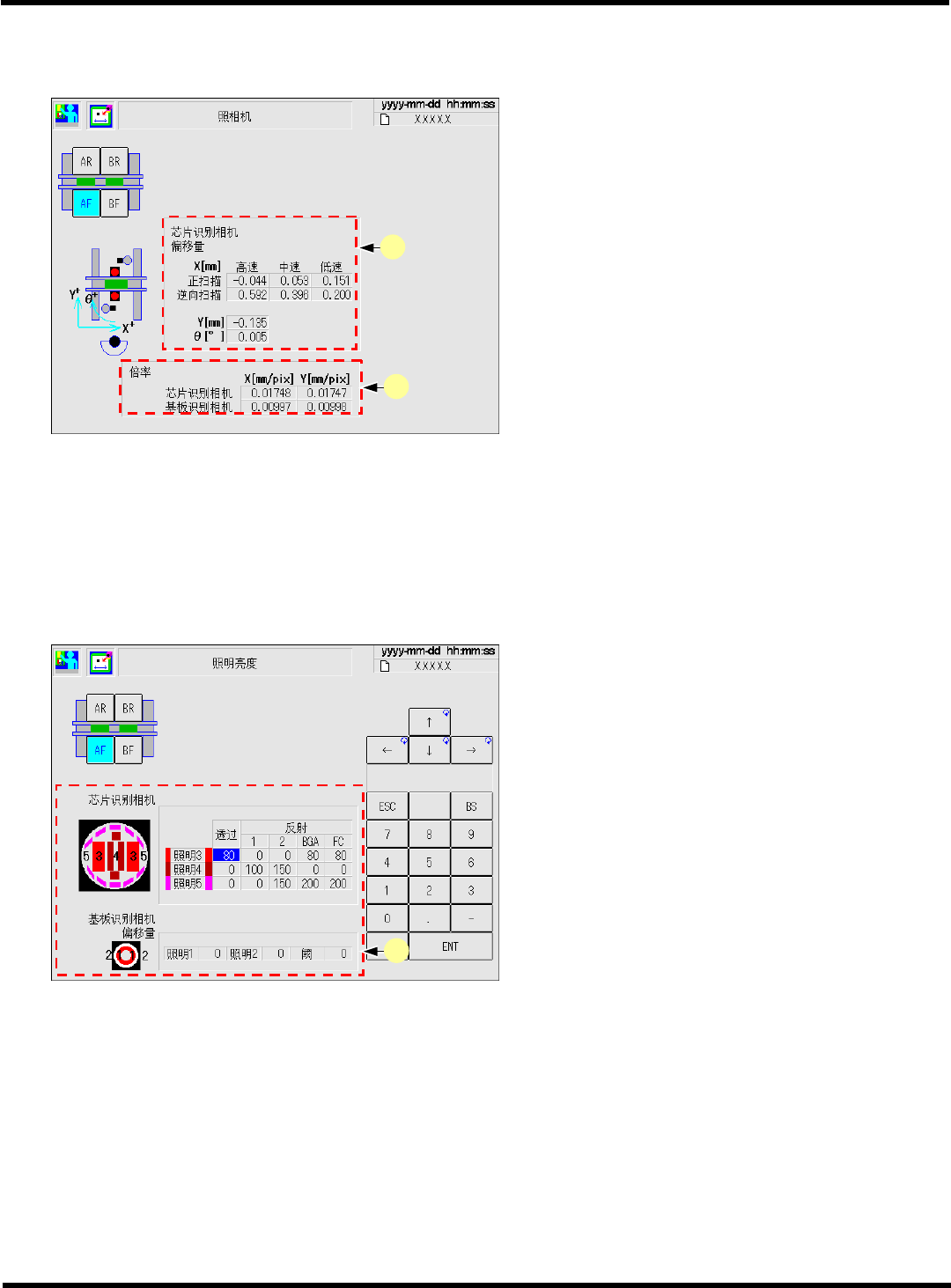
照相机
a. ‘
芯片识别相机
偏移量
’
显示芯片识别照相机的位置和倾斜度。
‘
正扫描
’
用于芯片识别位置的补正以及芯片识别的计算。
‘
逆向扫描
’
是芯片识别逆向扫描时的偏移量。
用于逆向扫描时的芯片识别的计算。
b. ‘
倍率
’
‘
芯片识别相机
’
显示芯片识别相机的像素率。
在计算芯片识别时使用。
‘
基板识别相机
’
显示基板识别相机的像素率。
在计算基板识别时使用。
2.1.12
照明亮度
a.
照明亮度偏移量
显示每个识别种类的各自照明亮度的增减度。
在决定芯片识别时的亮度时使用。
EJM8A-C-MMC02-A01-01
EJM4A-Mp-0019
a
b
EJM4A-Mp-0020
a
CM602-L
维修手册
2.1
关于机器参数
Page 2-28
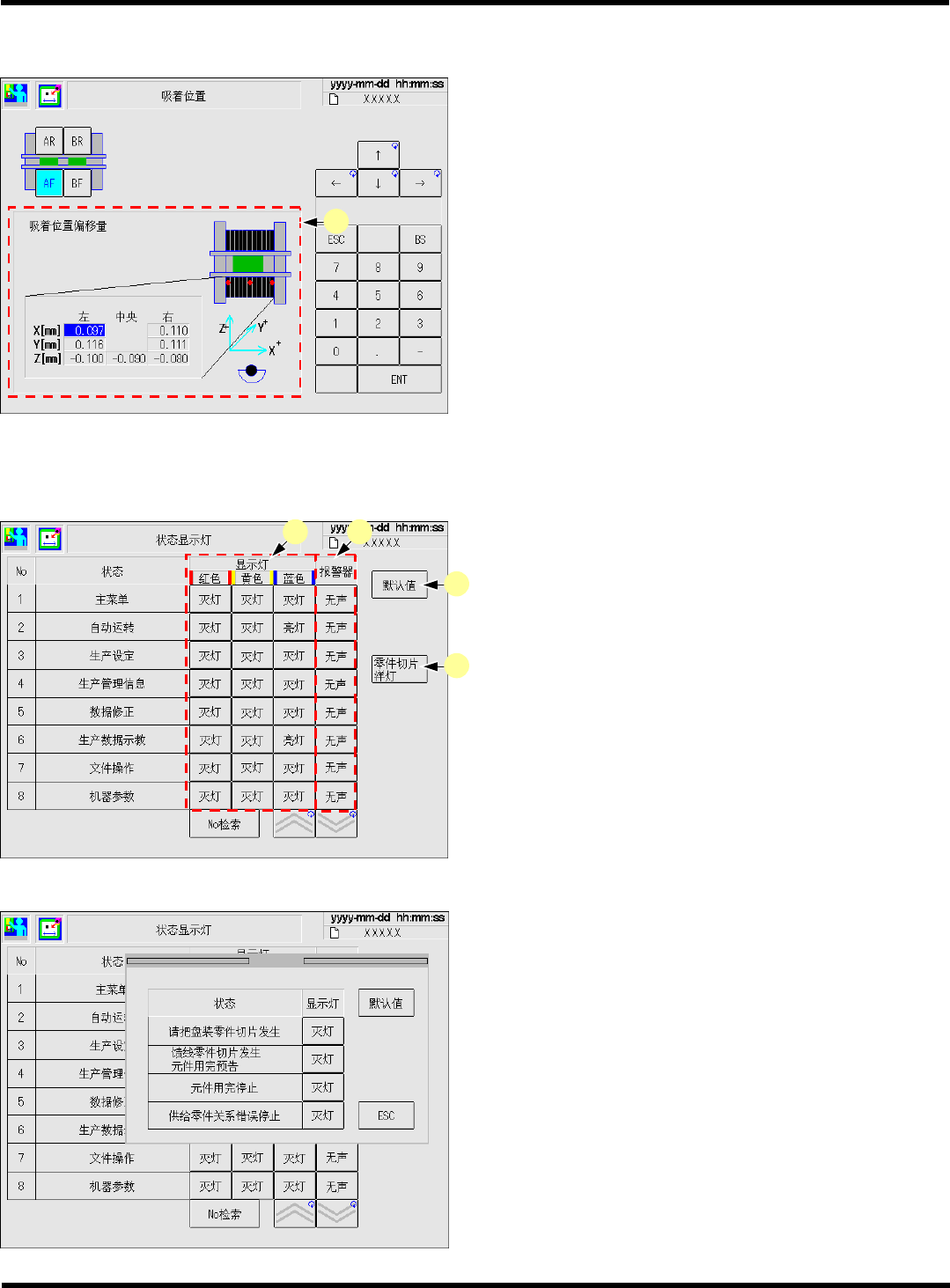
2.1.13
吸着位置
a. ‘
吸着位置偏移量
’
表示每个供料器工作台的吸着位置。
作为吸着位置学习的初始值发挥作用。
2.1.14
状况显示灯
可以设定各状况上的显示灯及报警器的状态。
a. ‘
显示灯
’
可按
[
灭灯
]
→
[
亮灯
]
→
[
闪烁
]
的顺序转换。
b. ‘
报警器
’
可按
[
连续
]
→
[
间断
]
→
[
无声
]
的顺序转换。
c. [
默认值
]
按该键所有的设定都将被初始化为标准规格。
d. [
零件切片洋灯
]
按此处,画面将被显示。在此进行元件用完灯的
设定。
关于详情,请参照如下说明。
[
零件切片洋灯
]
画面详情
EJM8A-C-MMC02-A01-01
EJM4A-Mp-0095
a
EJM4A-Mp-0077
EJM4A-Mp-0021
c
a b
d