3OM-1301-002.pdf - 第269页
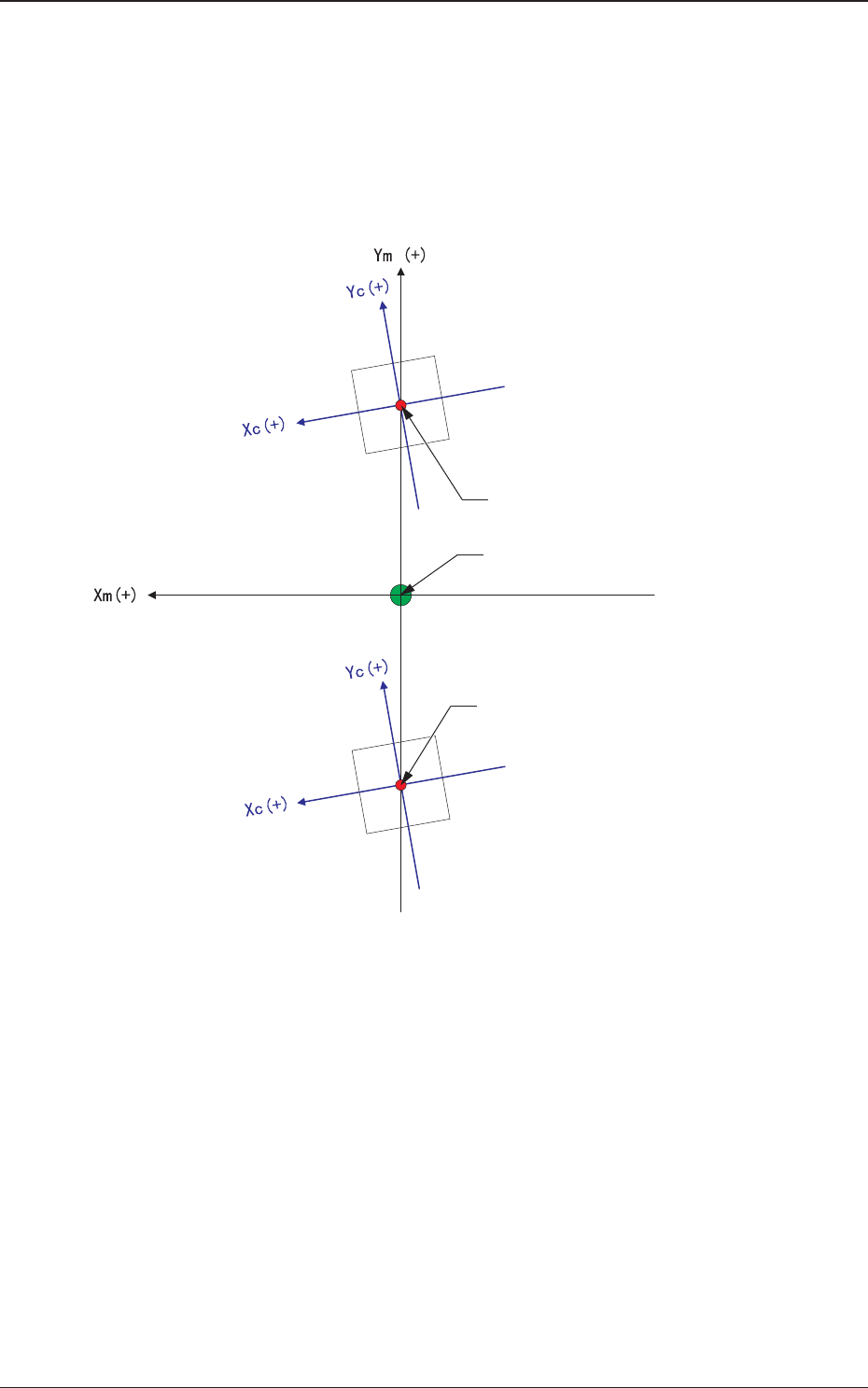
6 - 48 2.1 2.1 2.1 2.1 2.1 补正值数据 补正值数据 补正值数据 补正值数据 补正值数据 0506-001 Z( Z( Z( Z( Z( 角度 角度 角度 角度 角度 )[ )[ )[ )[ )[ ° ° ° ° ° ] ] ] ] ] 设定对装置基准 XY 坐标 (Xm-Ym 坐标 ) 的元件识别照相机扫描坐 标的角度偏离。以装置基准 XY 坐标系为基准,元件识别照相 机扫描坐标往逆时针方向倾斜时,补正值数据的…
6-47
2.1 2.1
2.1 2.1
2.1
补正值数据补正值数据
补正值数据补正值数据
补正值数据
0506-001
在各照相机设定以下补正值。
[1][1]
[1][1]
[1]
元件识别照相机元件识别照相机
元件识别照相机元件识别照相机
元件识别照相机
X(X(
X(X(
X(
横横
横横
横
))
))
)
、、
、、
、
Y(Y(
Y(Y(
Y(
纵纵
纵纵
纵
)[mm])[mm]
)[mm])[mm]
)[mm]
调整对装置基准坐标系原点到元件识别照相机中心的设计
尺寸的位置偏离。
Fig.3F39Fig.3F39
Fig.3F39Fig.3F39
Fig.3F39
Xm-YmXm-Ym
Xm-YmXm-Ym
Xm-Ym
::
::
:
装置基准坐标系装置基准坐标系
装置基准坐标系装置基准坐标系
装置基准坐标系
Xc-YcXc-Yc
Xc-YcXc-Yc
Xc-Yc
::
::
:
元件识别照相机坐标系元件识别照相机坐标系
元件识别照相机坐标系元件识别照相机坐标系
元件识别照相机坐标系
Pm.Pm.
Pm.Pm.
Pm.
装置基准坐标原点装置基准坐标原点
装置基准坐标原点装置基准坐标原点
装置基准坐标原点
元件识别照相机中心元件识别照相机中心
元件识别照相机中心元件识别照相机中心
元件识别照相机中心
元件识别照相机中心元件识别照相机中心
元件识别照相机中心元件识别照相机中心
元件识别照相机中心
6-48
2.1 2.1
2.1 2.1
2.1
补正值数据补正值数据
补正值数据补正值数据
补正值数据
0506-001
Z(Z(
Z(Z(
Z(
角度角度
角度角度
角度
)[)[
)[)[
)[
° °
° °
°
]]
]]
]
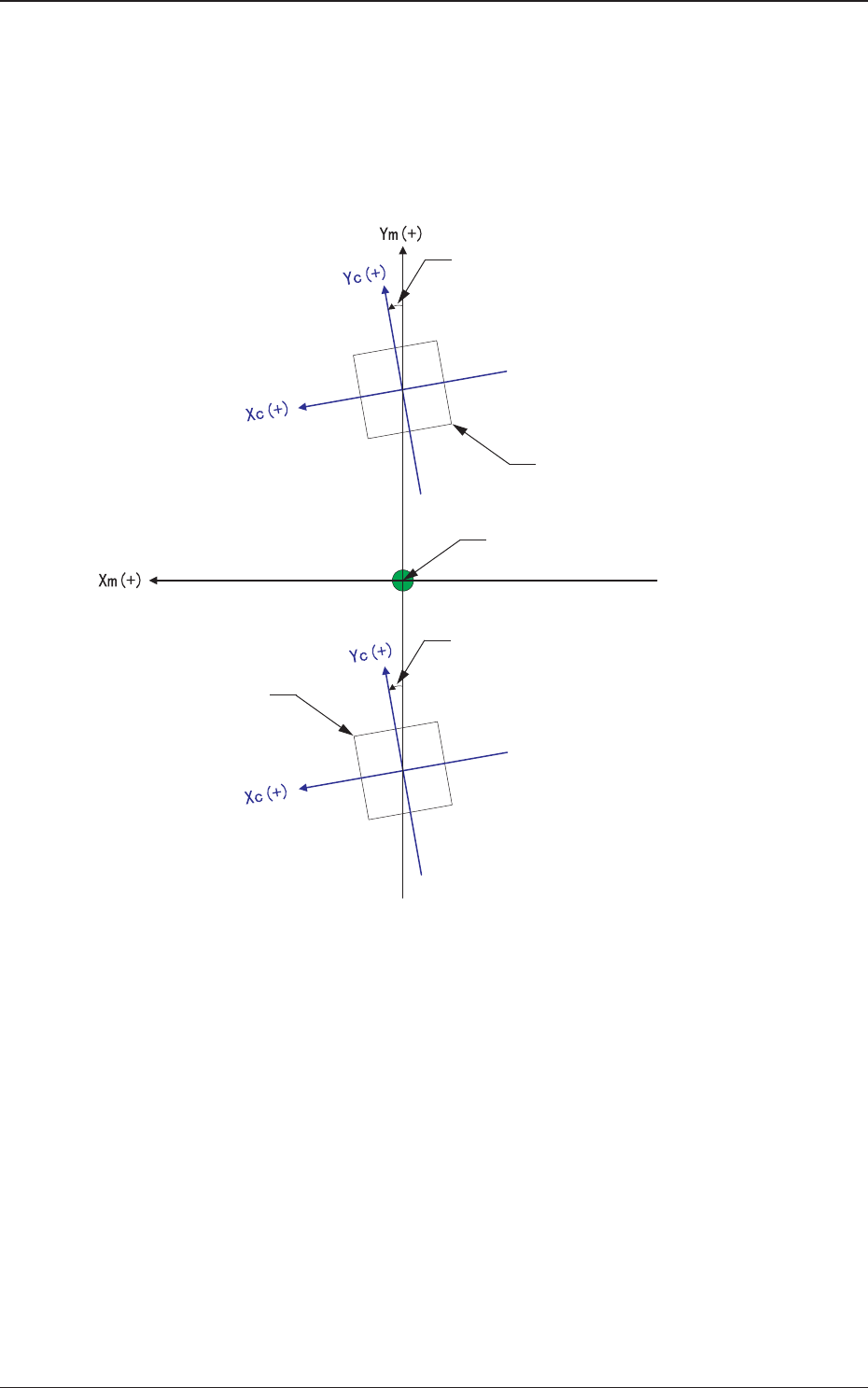
设定对装置基准 XY 坐标(Xm-Ym 坐标) 的元件识别照相机扫描坐
标的角度偏离。以装置基准 XY 坐标系为基准,元件识别照相
机扫描坐标往逆时针方向倾斜时,补正值数据的符号为 “ + ” 。
Fig.3F40Fig.3F40
Fig.3F40Fig.3F40
Fig.3F40
倍率倍率
倍率倍率
倍率
X( X(
X( X(
X(
横横
横横
横
))
))
)
、、
、、
、
Y(Y(
Y(Y(
Y(
纵纵
纵纵
纵
)[0.01)[0.01
)[0.01)[0.01
)[0.01
微米微米
微米微米
微米
((
((
( µ
m)/m)/
m)/m)/
m)/
像素像素
像素像素
像素
(pixel)](pixel)]
(pixel)](pixel)]
(pixel)]
是设定元件识别照相机倍率的数据,用来设定 1pixel 相当
于多少 µm。
该补正值在倍率测定用治具的教示操作下自动被算出。
•
初始值初始值
初始值初始值
初始值 : 6060
Xm-YmXm-Ym
Xm-YmXm-Ym
Xm-Ym
::
::
:
装置基准坐标系装置基准坐标系
装置基准坐标系装置基准坐标系
装置基准坐标系
Xc-YcXc-Yc
Xc-YcXc-Yc
Xc-Yc
::
::
:
元件识别照相机坐标系元件识别照相机坐标系
元件识别照相机坐标系元件识别照相机坐标系
元件识别照相机坐标系
Pm.Pm.
Pm.Pm.
Pm.
装置基准坐标原点装置基准坐标原点
装置基准坐标原点装置基准坐标原点
装置基准坐标原点
元件识别照相机元件识别照相机
元件识别照相机元件识别照相机
元件识别照相机
元件识别照相机角度元件识别照相机角度
元件识别照相机角度元件识别照相机角度
元件识别照相机角度
元件识别照相机元件识别照相机
元件识别照相机元件识别照相机
元件识别照相机
元件识别照相机角度元件识别照相机角度
元件识别照相机角度元件识别照相机角度
元件识别照相机角度
6-49
2.1 2.1
2.1 2.1
2.1
补正值数据补正值数据
补正值数据补正值数据
补正值数据
0506-001
对比度、对比度、
对比度、对比度、
对比度、
亮度亮度
亮度亮度
亮度
调整元件识别照相机拍摄的图像的亮度。
•
初始值初始值
初始值初始值
初始值
对比度对比度
对比度对比度
对比度 : 102
亮度亮度
亮度亮度
亮度 : 128
(a) 增加对辉度值,色彩效果好。
(b) 增加亮度值,整体变亮。
[2][2]
[2][2]
[2]
元件识别照明辉度元件识别照明辉度
元件识别照明辉度元件识别照明辉度
元件识别照明辉度
透过、透过、
透过、透过、
透过、
反射反射
反射反射
反射
1(1(
1(1(
1(
环状环状
环状环状
环状
下下
下下
下
))
))
)
、、
、、
、
反射反射
反射反射
反射
2(2(
2(2(
2(
同轴同轴
同轴同轴
同轴
))
))
)
、、
、、
、
反射反射
反射反射
反射
3(3(
3(3(
3(
环状环状
环状环状
环状
上上
上上
上
))
))
)
反射反射
反射反射
反射
1+2(1+2(
1+2(1+2(
1+2(
环状环状
环状环状
环状
下下
下下
下
++
++
+
同轴同轴
同轴同轴
同轴
))
))
)
、、
、、
、
反射反射
反射反射
反射
1+3(1+3(
1+3(1+3(
1+3(
环状环状
环状环状
环状
下下
下下
下
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
、、
、、
、
反射反射
反射反射
反射
2+3(2+3(
2+3(2+3(
2+3(
同轴同轴
同轴同轴
同轴
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
、、
、、
、
反射反射
反射反射
反射
1+2+3(1+2+3(
1+2+3(1+2+3(
1+2+3(
环状环状
环状环状
环状
下下
下下
下
++
++
+
同轴同轴
同轴同轴
同轴
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
设定元件识别照明的亮度水准。
•
初始值初始值
初始值初始值
初始值
透过透过
透过透过
透过
::
::
:
128128
128128
128
反射反射
反射反射
反射
1(1(
1(1(
1(
环状环状
环状环状
环状
下下
下下
下
))
))
)
::
::
:
160160
160160
160
反射反射
反射反射
反射
2(2(
2(2(
2(
同轴同轴
同轴同轴
同轴
))
))
)
::
::
:
160160
160160
160
反射反射
反射反射
反射
3(3(
3(3(
3(
环状环状
环状环状
环状
上上
上上
上
))
))
)
::
::
:
128128
128128
128
反射反射
反射反射
反射
1+2(1+2(
1+2(1+2(
1+2(
环状环状
环状环状
环状
下下
下下
下
++
++
+
同轴同轴
同轴同轴
同轴
))
))
)
::
::
:
160160
160160
160
反射反射
反射反射
反射
1+3(1+3(
1+3(1+3(
1+3(
环状环状
环状环状
环状
下下
下下
下
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
::
::
:
00
00
0
反射反射
反射反射
反射
2+3(2+3(
2+3(2+3(
2+3(
同轴同轴
同轴同轴
同轴
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
::
::
:
160160
160160
160
反射反射
反射反射
反射
1+2+3(1+2+3(
1+2+3(1+2+3(
1+2+3(
环状环状
环状环状
环状
下下
下下
下
++
++
+
同轴同轴
同轴同轴
同轴
++
++
+
环状环状
环状环状
环状
上上
上上
上
))
))
)
::
::
:
00
00
0
[3][3]
[3][3]
[3]
FlyFly
FlyFly
Fly
识别识别
识别识别
识别
XYXY
XYXY
XY
X(X(
X(X(
X(
横横
横横
横
))
))
)
、、
、、
、
Y(Y(
Y(Y(
Y(
纵纵
纵纵
纵
)[mm])[mm]
)[mm])[mm]
)[mm]
在元件识别照相机上求出停止摄像时与快速识别摄像时的
偏离量( 主要伺服放大器和闪控的延迟时间与因图像模糊的
影响) ,调整摄像定时的偏离。为了不让元件受延迟的影响
而导致从视野消失的数据。
Note