KE-2070_2080机器控制参数.pdf - 第152页
R e v 1 . 00c 机械控制参数 4-109 4-5-24 其他(其他) 图 4-5-24 其他 (1) 设定画面的显示方法 菜单∶ [ 输入 ]→[ 其它 ]→[ 其它 ]→[ 其它 ] 起动∶ [ 其它 ] 按键 →[ 其它 ] 标 标 →[ 其它 ] 按键
Rev1.00c
机械控制参数
4-108
(2)设定项目
输入范围
№ 项目
最小值 最大值
单
位
备考
1 定中心方式 0 3
0:激光
1:视觉
2,3:备用
※1
2 用户设置有效/无效
0:无效
1:有效(初期值)
※2
3 照明的种类
255:用户定义(初
期值)
4 OCC 的选择
0:L_OCC
1:R_OCC
5 照明模式有效/无效
0:无效
1:有效
※3
6 模式
0:垂直照明
1:角度照明
7 编辑标记
0:不可编辑
1: 可编辑( 初期
值)
8 装置开/关
0:OFF
1:ON
初期值垂直:1
角度:0
9
照明模式
亮度
初期值垂直:100
角度:0
※1 按下照明控制按钮时所选择的定中心方式即成为初期值。如果选择了在 FCS 生产控制参数对话框
中的各定心控制参数的“数据有效/无效”项目中已设置为“无效”的定中心方式,则此后的项目
不能编辑。
※2 若在“用户设置有效/无效”项目中选择了“无效”,则此后的项目不能编辑。
※3 若在“照明模式有效/无效”项目中选择了“无效”,则此后的项目不能编辑。
Rev1.00c
机械控制参数
4-109
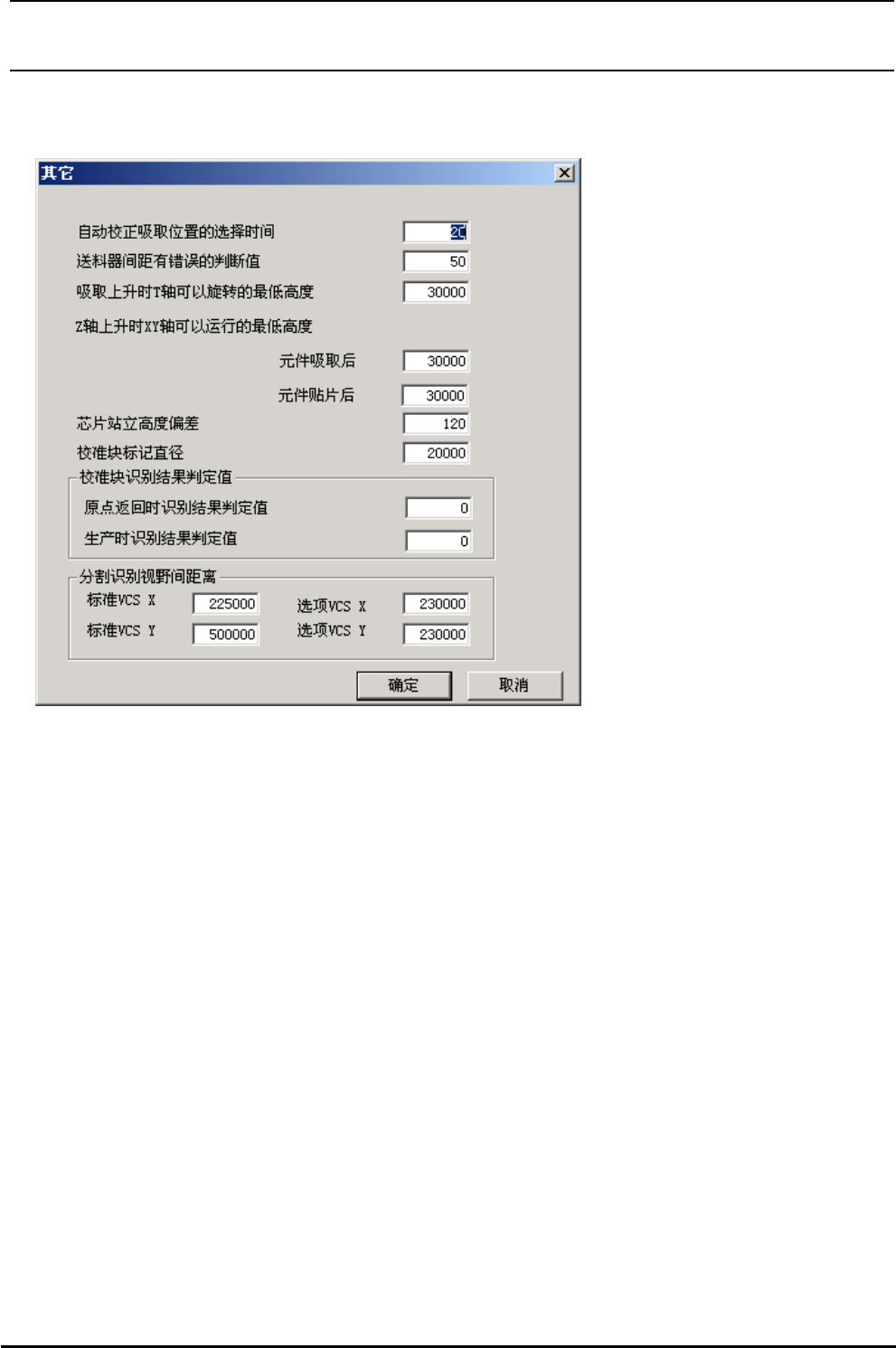
4-5-24 其他(其他)
图 4-5-24 其他
(1)设定画面的显示方法
菜单∶ [输入]→[其它]→[其它]→[其它]
起动∶ [其它]按键→[其它]标标→[其它]按键
Rev1.00c
机械控制参数
4-110
(2)设定项目
输入范围
№ 项目
最小值 最大值
单位 备考
1 芯片站立判断高度计算系数 0 7
0: w>=0.45
1:
0.25<=w<0.45
2: w<0.25
3∼7: 预备
2 自动校正吸取位置的选择时间 每次 初期值:20
3 送料器间距有错误的判断值 % 初期值:70
4
吸取上升时θ轴可以旋转的高度
(基板上面/吸附高度/托盘上面的
偏差)
0.1
μm
初期值:30000
(3mm)
5
元件吸取后(从最大元件高度到元
件下面位置的偏差)
0.1
μm
初期值:30000
(3mm)
6
Z 轴上升时的
XY 轴动作开始
可能高度
元件贴片后(最大元件高度到吸嘴
前端位置的偏差)
0.1
μm
初期值:30000
(3mm)
7 芯片站立高度偏差
0.1
μm
8 校准块标记直径
0.1
μm
初期值:20000
(2mm)
9 标准 VCS X
10 标准 VCS Y
11 选项 VCS(高分辨率摄像机) X
12
分割识别时的
视野间距
选项 VCS(高分辨率摄像机) Y
13 小型元件的长边
0.1
μm
初期值:150000