KE-2070_2080机器控制参数.pdf - 第21页
R e v 1 . 00c 机械控制参数 2-14 (8) 真空 ( a ) 进行对于各种元件的各种真空同步时间的设定。 ( b ) 进行真空校准的设定。 (c) 对于各元件的适用最大元件尺寸和各种元件真空同步时间表的目录的设定。 ( d ) 进行过滤不良判断值的设置。 (9)CDS 进行触点传感器阈值的设置。设置 CDS 高度数据。 (10)LNC60 进行 LNC60 的设置。设置元件形状的阈值。 (11) 其它 ( a ) 进行吸…
Rev1.00c
机械控制参数
2-13
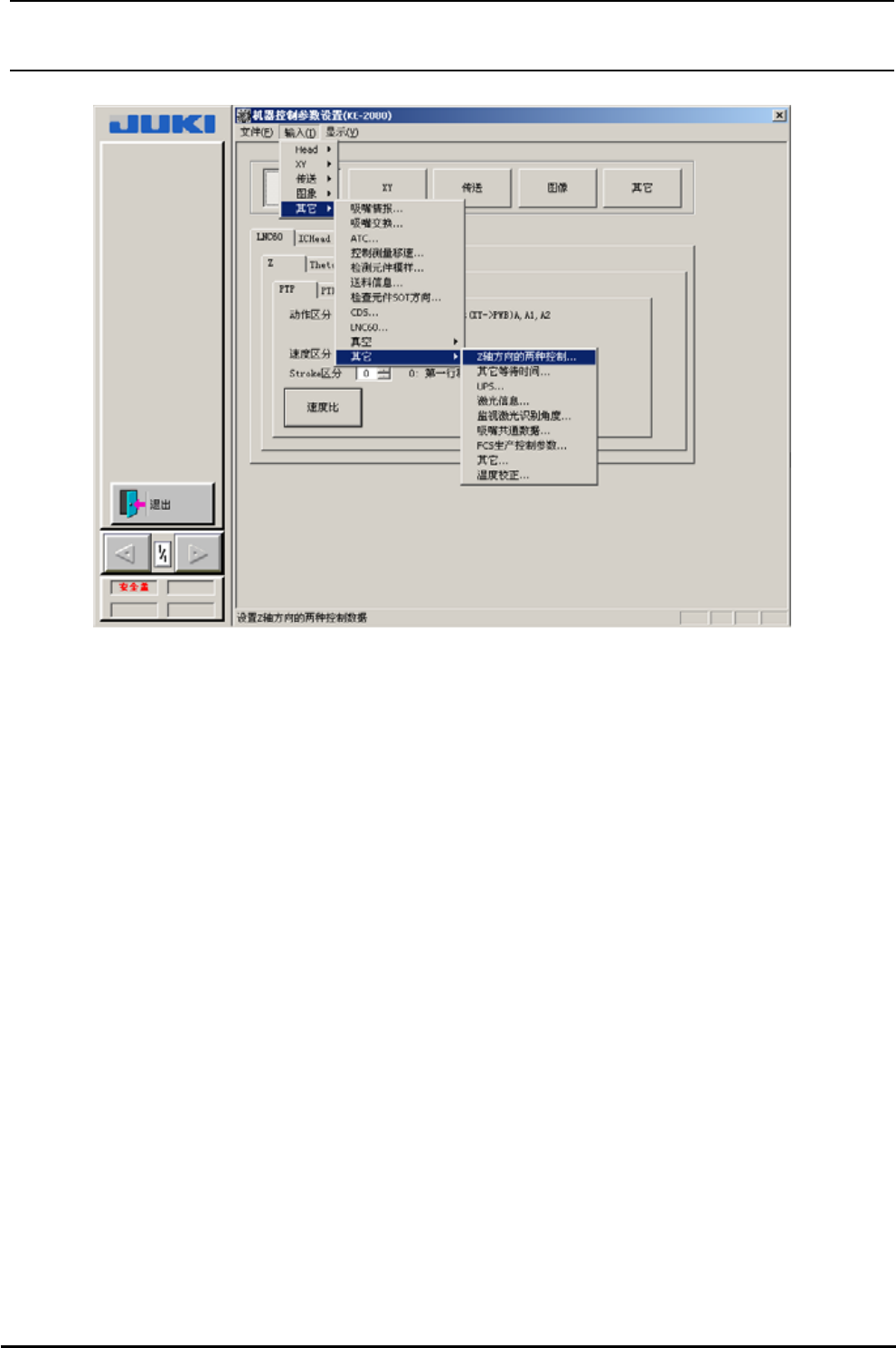
图 2-2-11 其他菜单(其他)
(1)吸嘴情报
进行吸嘴信息的设定。
(2)吸嘴交换
进行同时更换吸嘴的范围、更换吸嘴时的吸嘴长度检测高度等的设定。
(3)ATC
进行 ATC 的设定。
(4)控制测量移速
进行示教步骤控制的设定。
(5)检测元件模样
进行元件姿势检测的设定。
(6)送料信息
进行供料器敲击信息的设定。
(7)检测元件 SOT 方向
进行元件 SOT 方向检查的设定。

Rev1.00c
机械控制参数
2-14
(8)真空
(a) 进行对于各种元件的各种真空同步时间的设定。
(b) 进行真空校准的设定。
(c) 对于各元件的适用最大元件尺寸和各种元件真空同步时间表的目录的设定。
(d) 进行过滤不良判断值的设置。
(9)CDS
进行触点传感器阈值的设置。设置 CDS 高度数据。
(10)LNC60
进行 LNC60 的设置。设置元件形状的阈值。
(11)其它
(a) 进行吸附贴装Z轴 2 级控制用数据的设定。
(b) 进行其他待机时间的设定。
(c) 进行停电时的待机时间的设定。
(d) 进行激光信息的设定。
(e) 进行速度偏差限度/DAC 限度的设定。
(f) 进行激光识别角度监视参数的设定。
(g) 进行吸嘴通用信息参数的设定。
(h) 进行 FCS 生产控制参数的设定。
(i) 进行以下的参数的设定。
・芯片站立判断高度计算系数
・吸附位置自动修正的更新同步时间
・供料器传送间隔偏移判定值
・吸附上升时的θ轴开始转动的可能高度
・Z轴上升时的 XY 轴开始动作的可能高度
・芯片站立检测高度偏差
・校准块标记直径
・校准块识别结果界限
・小型元件的长边
・分割识别时的视野间距离
(j) 进行温度校正的设置
(k) 进行 LNC 用户定义的设置。
*1
*1. 用于测试评估,所以通常不显示。
Rev1.00c
机械控制参数
2-15
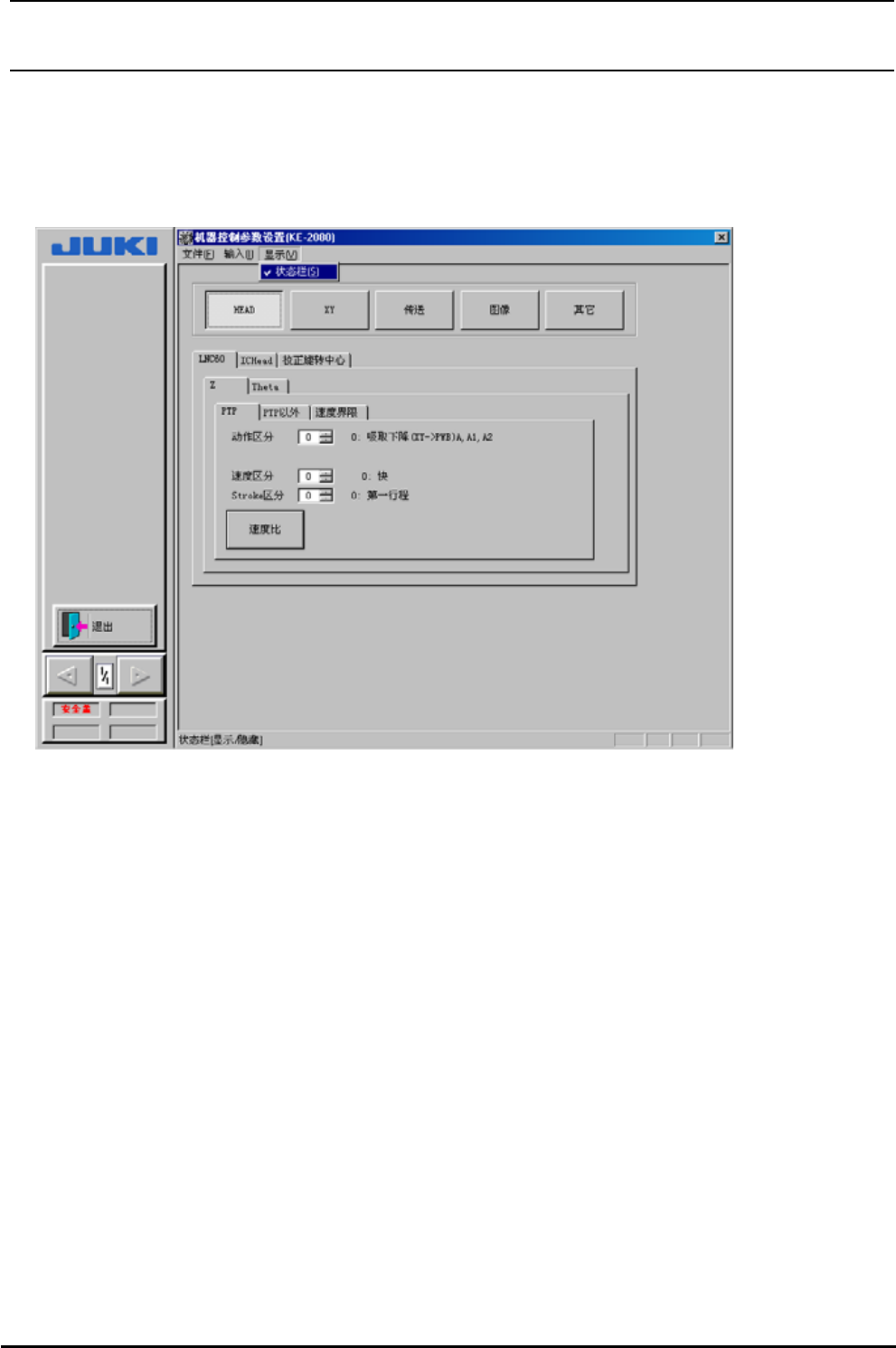
2-3 显示
选择了菜单条的[显示]之后,就会显示出如图 2-3-1 所示的显示菜单。
图 2-3-1 显示菜单
进行状态条的显示/非显示的选择。