KE-2070_2080机器控制参数.pdf - 第46页
R e v 1 . 00c 机械控制参数 4-3 (4) 速度类别 № 类别 内 容 1 0 高速 2 1 中速 3 2 低速 4 3 超低速 5 4 高速 2 6 5 护罩开放 7 6 低速 2 (特别定制) 8 7 过去的方式 FC 速度 9 8 110: 速度 1 10 9 120:速度 2 11 10 130: 速度 3 12 11 140: 速度 4 13 12 150: 速度 5 14 13 160: 速度 6 15 14 …
Rev1.00c
机械控制参数
4-2
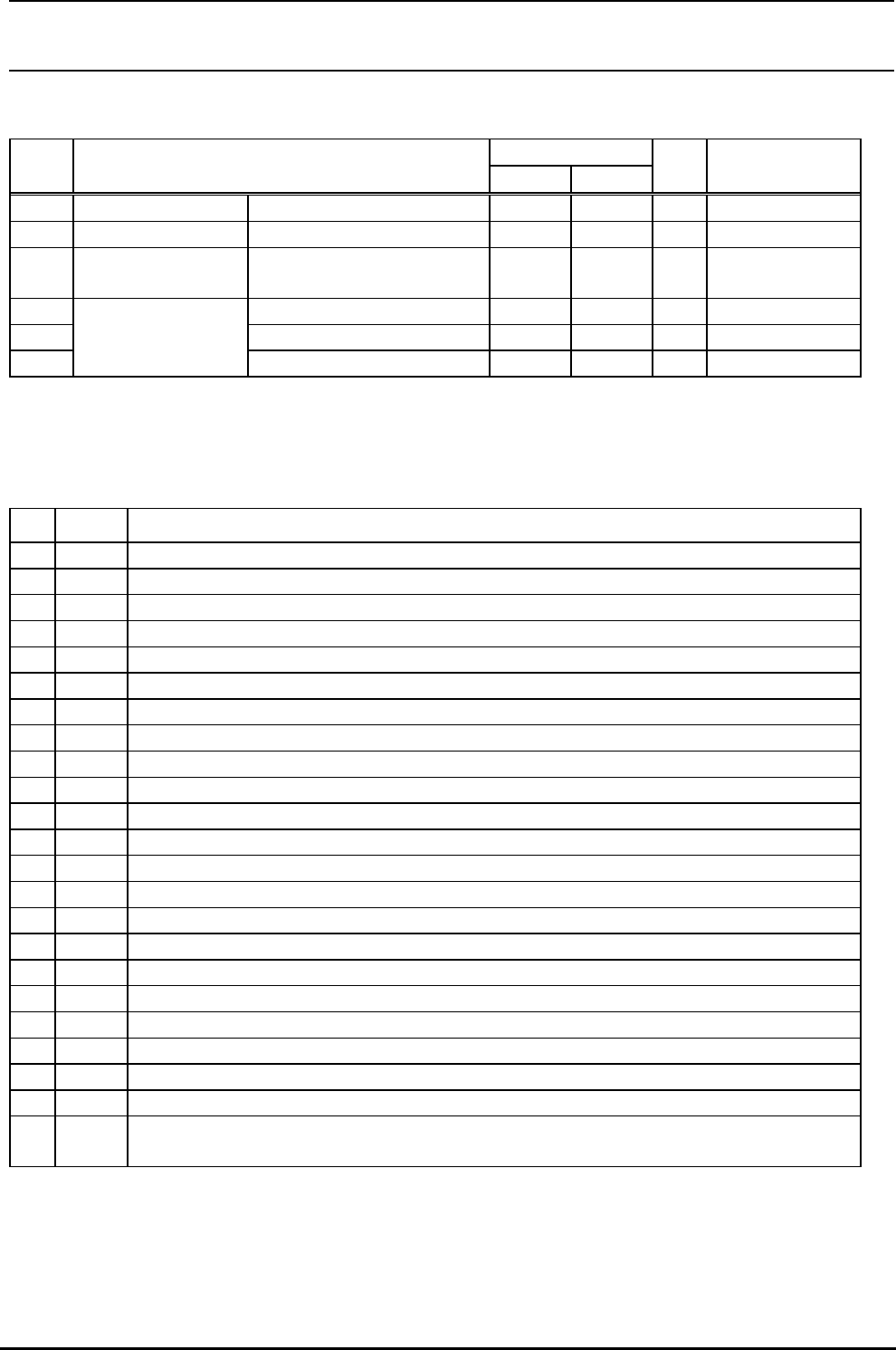
(2)设定项目(LNC60、IC Head 通用)
输入范围
№ 项目
最小值 最大值
单
位
备考
1 动作区分 0 19 参照(3)动作区分
2 速度区分 0 17 参照(4)速度区分
3 Stroke 区分 0 1
参照(5)Stroke 区
分
4 速度比(%) % 0.0∼100.0
5 加速度比(%) % 0.0∼100.0
6
Z轴 PTP 动作速度
表
减速度比(%) % 0.0∼100.0
注) 动作区分为 0-19 的情况下,速度区分可以在 0-17 内选择。动作区分在 20 以上的情况下,速度区分
的范围变为 0-7。
(3)动作类别
№ 类别 内 容
1 0 吸附下降 (XY ->PWB) A,A1,A2
2 1 预备
3 2 吸附上升 (PWB->XY ) C,C1,C2
4 3 预备
5 4 吸附上升 (PWB->LA ) E,E1,E2
6 5 识别下降 (XY ->VCS) F
7 6 预备
8 7 识别下降 (LA ->VCS) H
9 8 用 LA 识别元件 (LA->XY) I
10 9 识别上升 (VCS->XY ) J
11 10 预备
12 11 识别上升 (VCS->LA ) L
13 12 用 LA 识别元件 (XY->LA) M
14 13 贴装下降 (XY ->PWB) N,N1,N2
15 14 预备
16 15 贴装下降 (LA ->PWB) P,P1,P2
17 16 贴装上升 (PWB->XY ) Q,Q1,Q2
18 17 预备
19 18 贴装上升 (PWB->LA ) S,S1,S2
20 19 其它动作
21 20 FCS 生产吸取上升(PWB->LA)
22 21 FCS 生产吸取上升(PWB->XY)
23
22 ∼
24
预备
Rev1.00c
机械控制参数
4-3
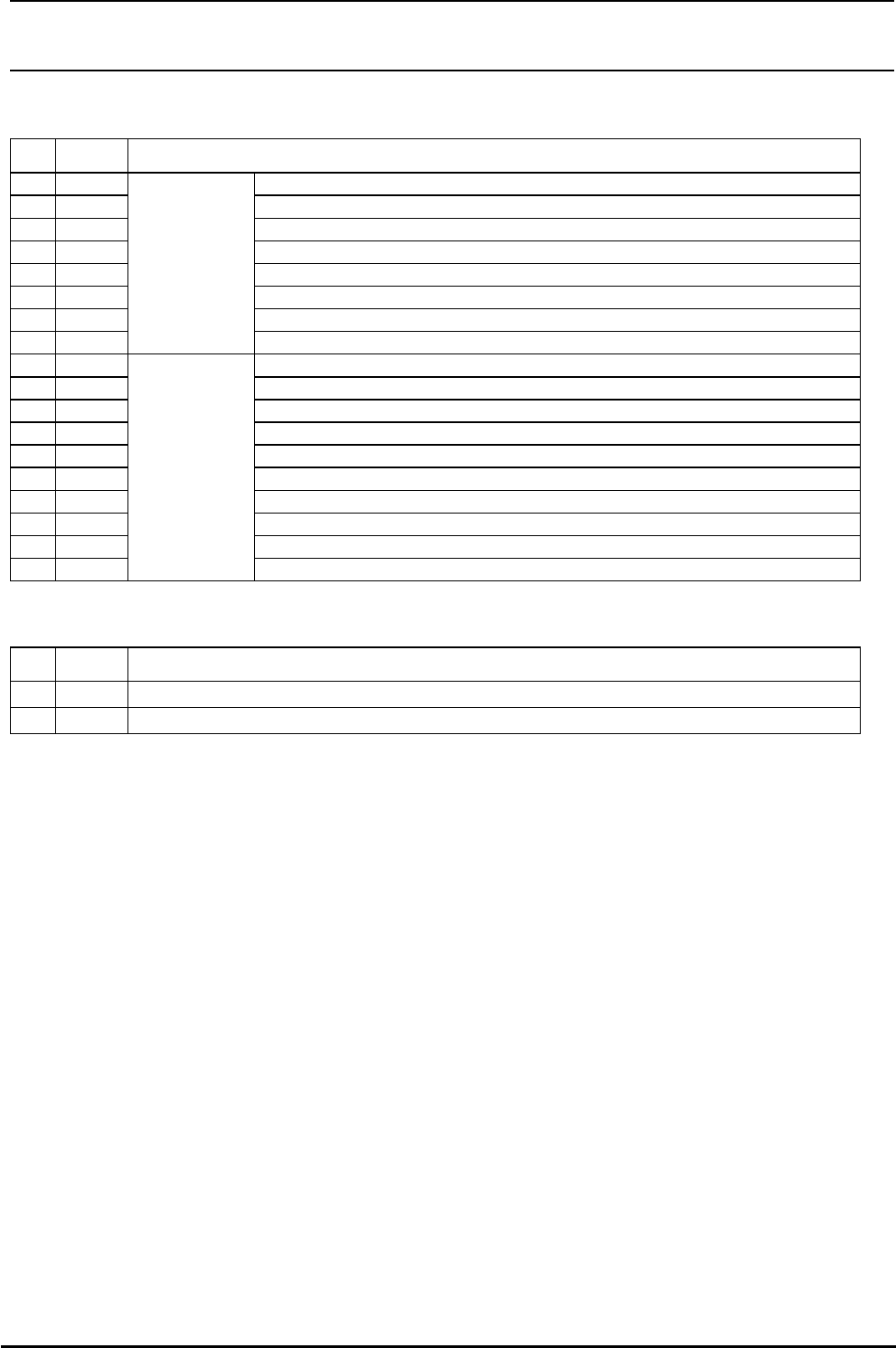
(4)速度类别
№ 类别 内 容
1 0 高速
2 1 中速
3 2 低速
4 3 超低速
5 4 高速 2
6 5 护罩开放
7 6 低速 2(特别定制)
8 7
过去的方式
FC 速度
9 8 110:速度 1
10 9 120:速度 2
11 10 130:速度 3
12 11 140:速度 4
13 12 150:速度 5
14 13 160:速度 6
15 14 170:速度 7
16 15 180:速度 8
17 16 190:速度 9
18 17
10 等级方式
200:速度 10
(5)行程类别
№ 类别 内 容
1 0 第 1 行程
2 1 第 2 行程
Rev1.00c
机械控制参数
4-4
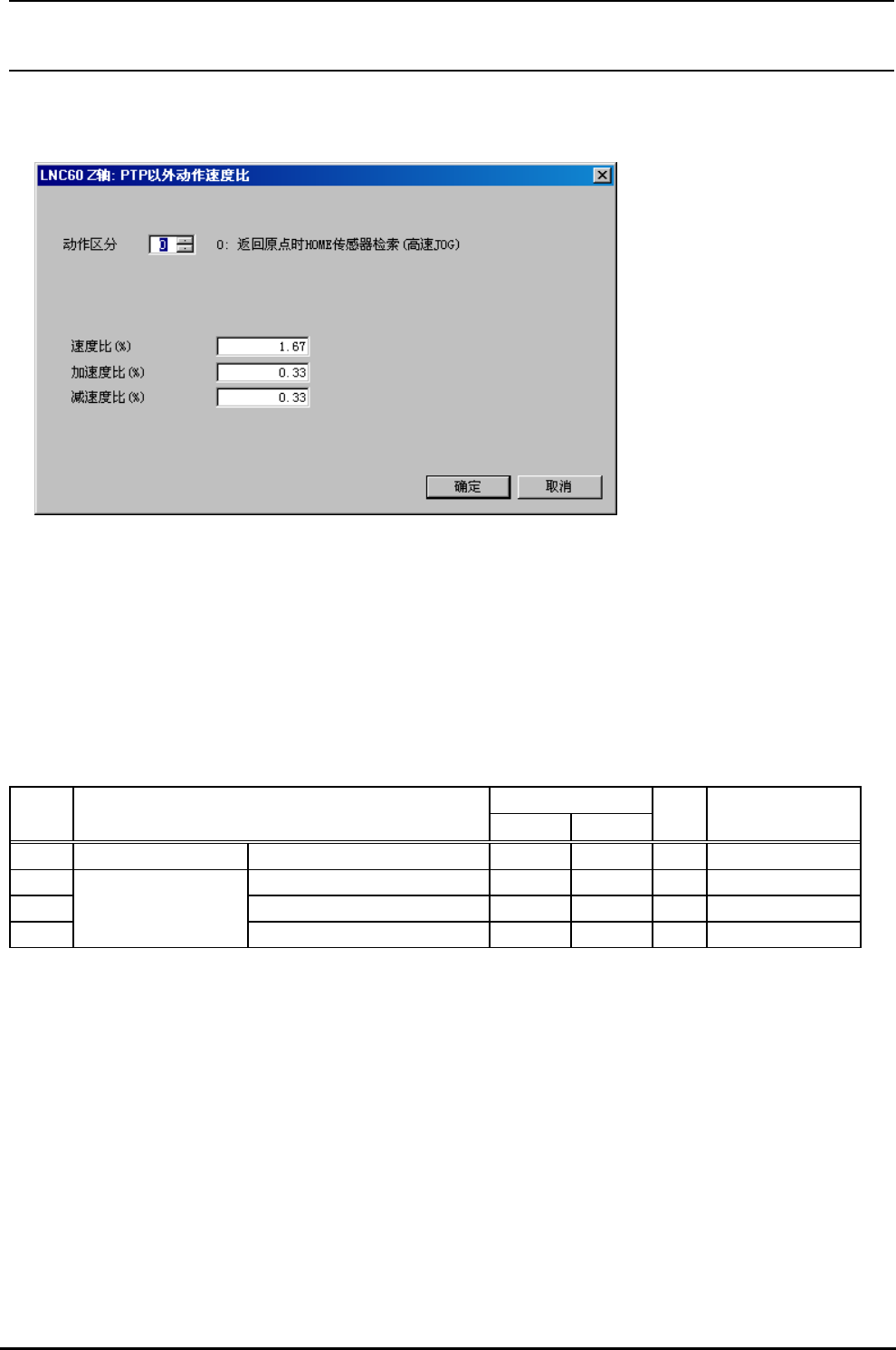
4-1-2 Z轴 PTP 以外的动作速度比
图 4-1-2 Z轴PTP 以外的动作速度比
(1)设定画面的显示方法
菜单∶ LNC60时, [输入]→[Head]→[LNC60]→[Z]→[PTP 以外]→[速度比]
IC Head时, [输入]→[Head]→[IC Head]→[Z]→[PTP 以外]→[速度比]
起动∶ LNC60时, [Head]按键→[LNC60]标标→[Z]标标→[PTP 以外]标标→[速度比]按键
IC Head时, [Head]按键→[IC Head]标标→[Z]标标→[PTP 以外]标标→[速度比]按键
(2)设定项目(LNC60、IC Head 通用)
输入范围
№ 项目
最小值 最大值
单
位
备考
1 动作区分 0 19 参照(3)动作区分
2 速度比(%) % 0.0∼100.0
3 加速度比(%) % 0.0∼100.0
4
Z轴 PTP 以外的动
作速度表
减速度比(%) % 0.0∼100.0