KE-2070_2080机器控制参数.pdf - 第53页
R e v 1 . 00c 机械控制参数 4-10 4-1-6 θ 轴速度限制 图 4-1-6 θ 轴速度限制 (1) 设定画面的显示方法 菜单∶ L N C 6 0 时, [ 输入 ]→[Head]→[LNC60]→[T]→[ 速度界限 ] I C H e a d 时, [ 输入 ]→[Head]→[IC Head]→[T]→[ 速度界限 ] 起动∶ L N C 6 0 时, [ H e a d ] 按键 →[LNC60] 标 标 →…
Rev1.00c
机械控制参数
4-9
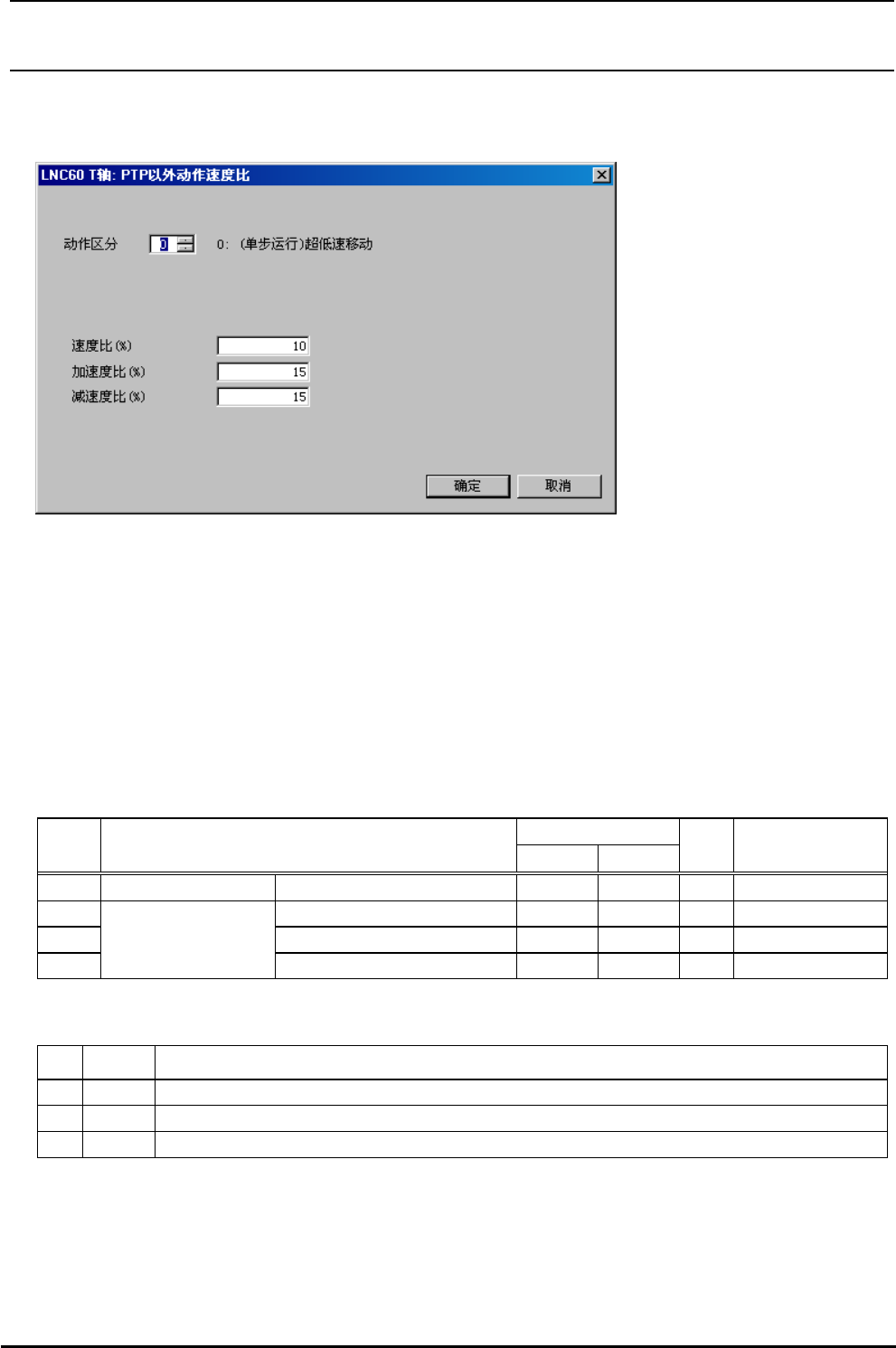
4-1-5 θ轴 PTP 以外的动作速度比
图 4-1-5 θ轴PTP 以外的动作速度比
(1)设定画面的显示方法
菜单∶ LNC60时, [输入]→[Head]→[LNC60]→[T]→[PTP 以外]→[速度比]
IC Head时, [输入]→[Head]→[IC Head]→[T]→[PTP 以外]→[速度比]
起动∶ LNC60时, [Head]按键→[LNC60]标标→[T]标标→[PTP 以外]标标→[速度比]按键
IC Head时, [Head]按键→[IC Head]标标→[T]标标→[PTP 以外]标标→[速度比]按键
(2)设定项目(LNC60、IC Head 通用)
输入范围
№ 项目
最小值 最大值
单
位
备考
1 动作区分 0 9 参照(3)动作区分
2 速度比(%) % 0.0∼100.0
3 加速度比(%) % 0.0∼100.0
4
θ轴 PTP以外动作
的速度表
减速度比(%) % 0.0∼100.0
(3)动作类别
№ 类别 内 容
1 0 微小步进
2 1 高速步进
3 2∼9 预备
Rev1.00c
机械控制参数
4-10
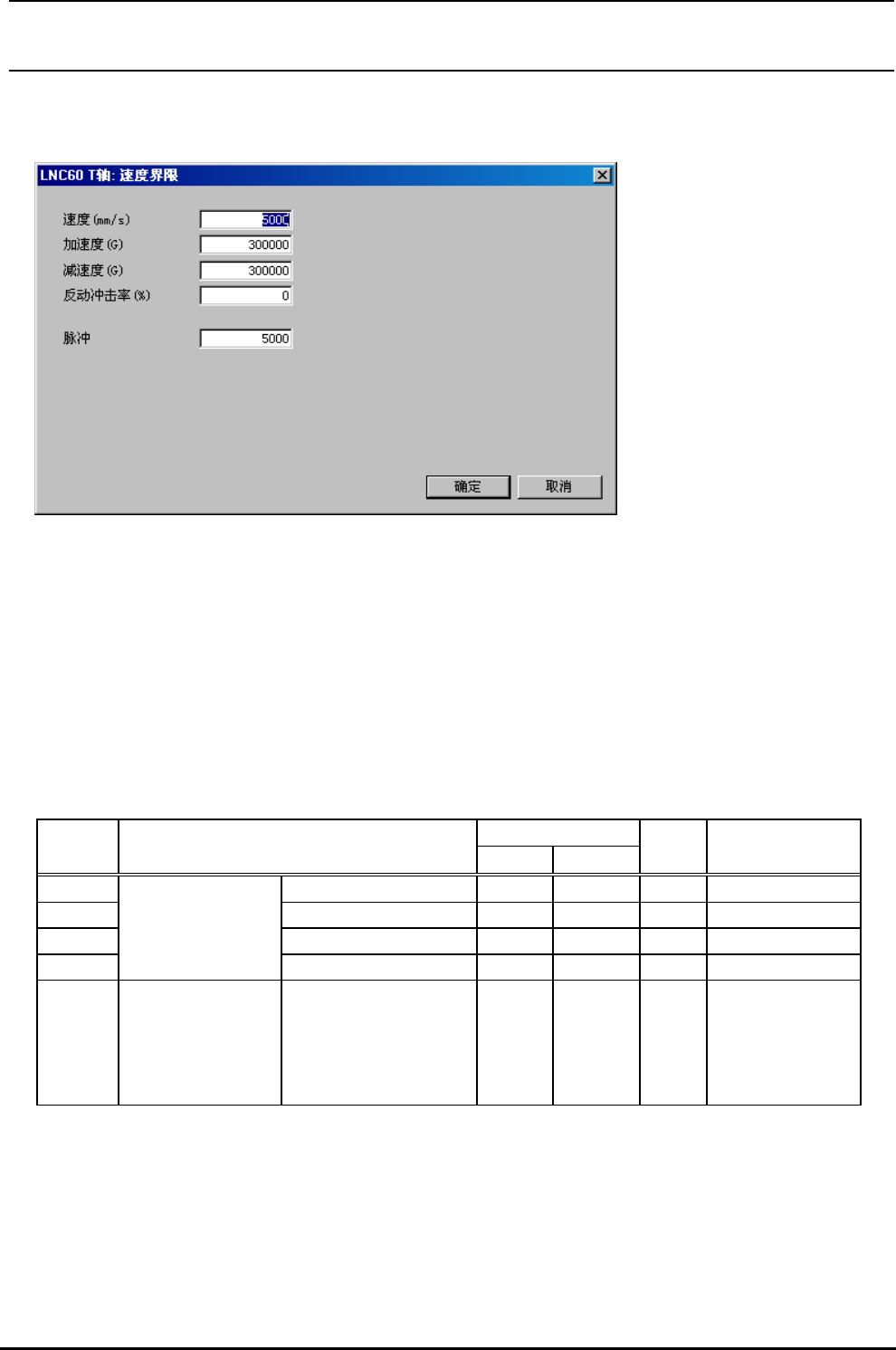
4-1-6 θ轴速度限制
图 4-1-6 θ轴速度限制
(1)设定画面的显示方法
菜单∶ LNC60时, [输入]→[Head]→[LNC60]→[T]→[速度界限]
IC Head时, [输入]→[Head]→[IC Head]→[T]→[速度界限]
起动∶ LNC60时, [Head]按键→[LNC60]标标→[T]标标→[速度界限]标标→[速度界限]按键
IC Head时, [Head]按键→[IC Head]标标→[T]标标→[速度界限]标标→[速度界限]按键
(2)设定项目(LNC60、IC Head 通用)
输入范围
№ 项目
最小值 最大值
单位 备考
1 速度(mm/s) mm/s
2 加速度(G) G
3 减速度(G) G
4
θ轴速度界限
(轴控制参数)
反动冲击率(%) % 0∼100
5 分辨率 脉冲
0.000
001°
LNC60 Head:
5000
(0.005゚)
IC Head: 5000
(0.005゚)
Rev1.00c
机械控制参数
4-11
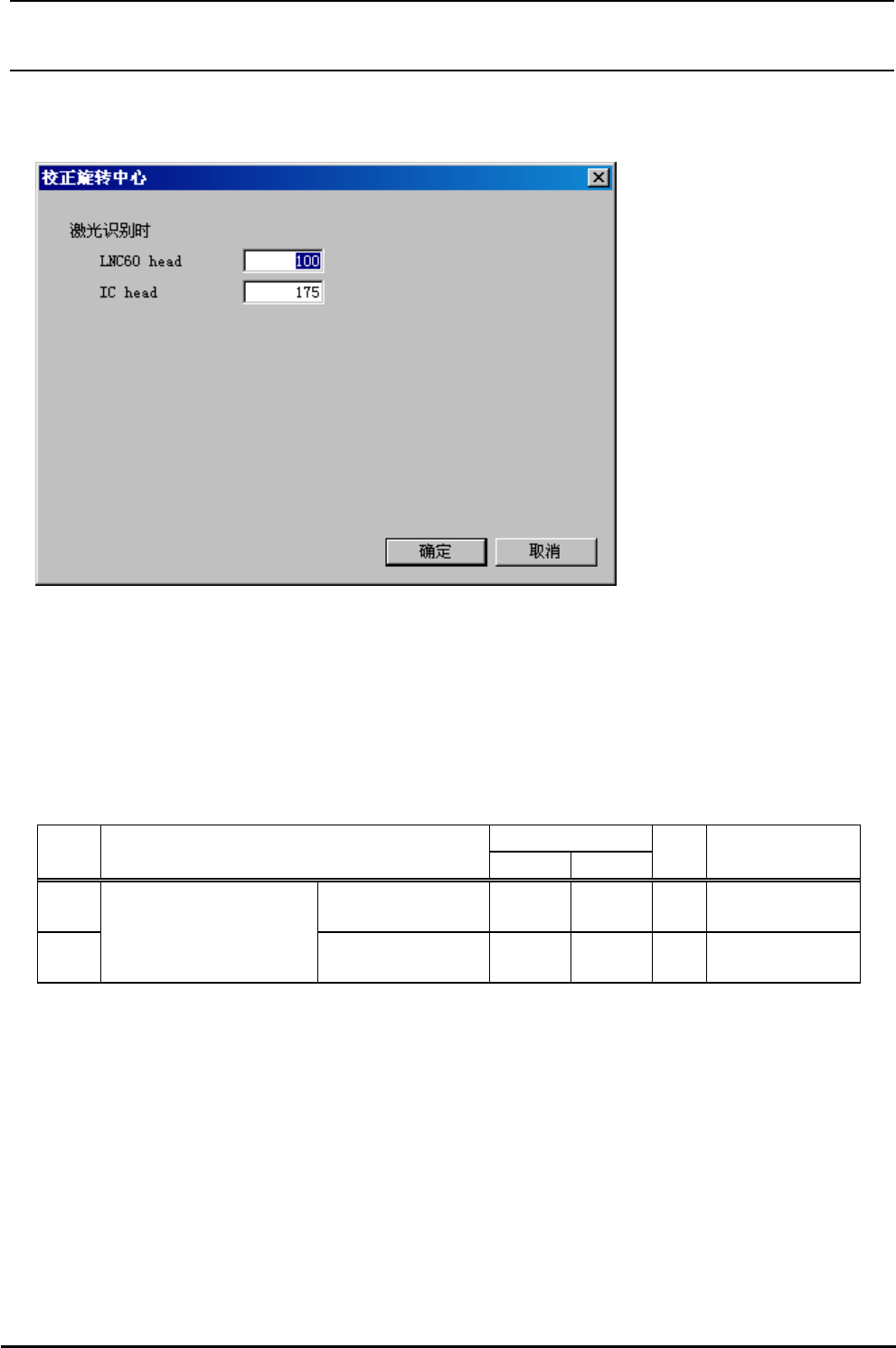
4-1-7 校正旋转中心
图 4-1-7 校正旋转中心
(1)设定画面的显示方法
菜单∶ [输入]→[Head]→[校正旋转中心]
起动∶ [输入]按键→[校正旋转中心]标标→[校正旋转中心值]按键
(2)设定项目
输入范围
№ 项目
最小值 最大值
单
位
备考
1 LNC60 Head
0.1
μm
初期值:100
(10μm)
2
激光识别时校正吸嘴旋
转中心最大(X轴移动中
的 G 的旋转中心偏差校
正值)
IC Head
0.1
μm
初期值:
(0μm)