KE-2070_2080机器控制参数.pdf - 第65页
R e v 1 . 00c 机械控制参数 4-22 4-2-6 XY 轴分解能 图 4-2-6 XY 轴分解能 (1) 设定画面的显示方法 菜单∶ [ 输入 ]→[XY]→[XY 轴分解能 ] 起动∶ [ X Y ] 按键 →[XY 轴分解能 ] 标 标 →[XY 轴分解能 ] 按键 (2) 设定项目 № 项目 输入范围 最小值 最大值 单 位 备考 1 X 0.00 1μ m 初期值 :1000 (1μm) 2 分解能 Y 0.00 …
Rev1.00c
机械控制参数
4-21
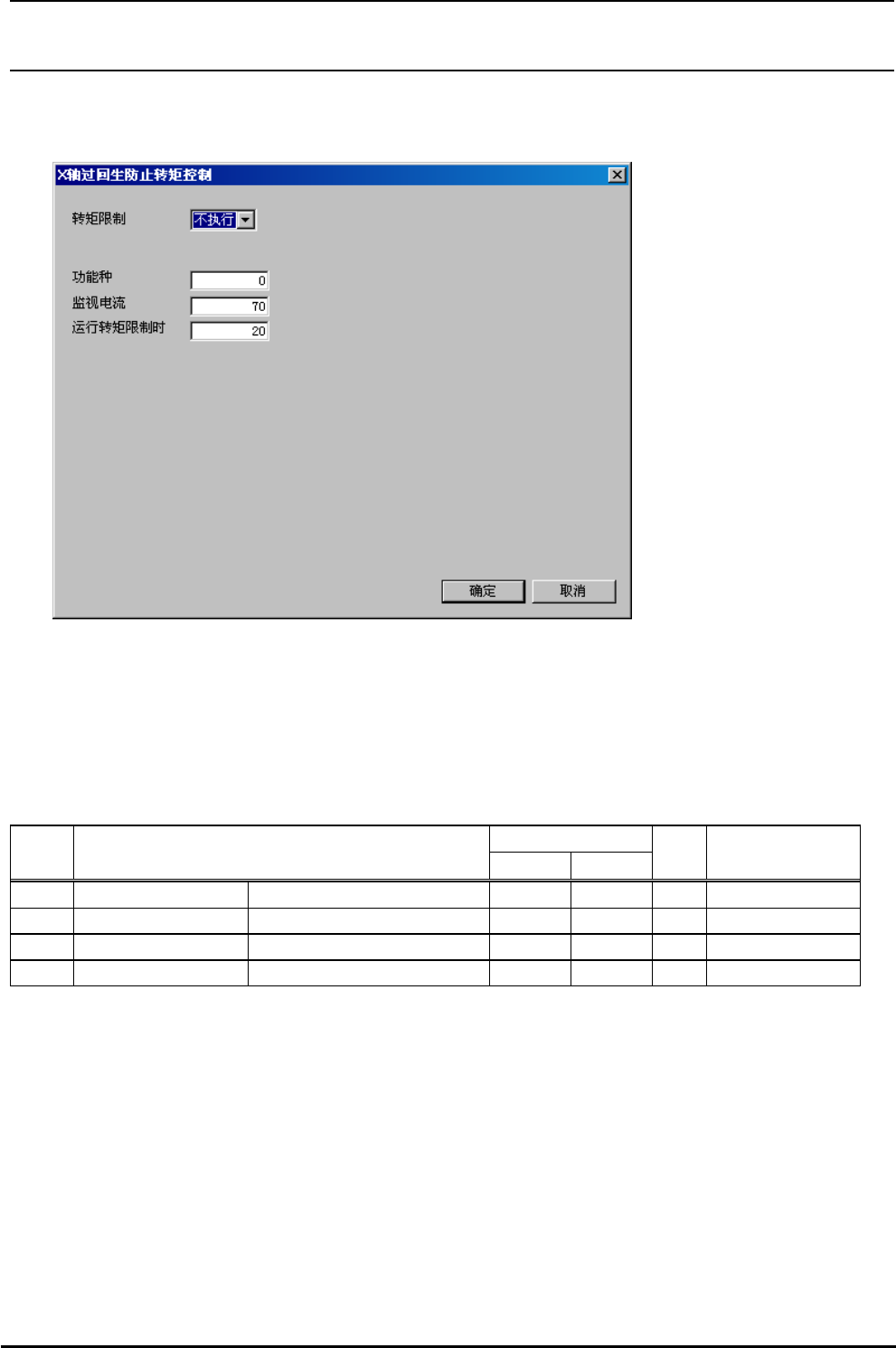
4-2-5 X 轴过回生防止转矩控制
图4-2-5 X 轴过回生防止转矩控制
(1)设定画面的显示方法
菜单∶ [输入]→[XY]→[X]→[电流监视]→[转矩限制]
起动∶ [XY]按键→[X]标标→[电流监视]标标→[转矩限制]按键
(2)设定项目(X 轴、Y 轴通用)
输入范围
№ 项目
最小值 最大值
单
位
备考
1
转矩控制
初期值:不控制
2
功能种类
初期值:0
3
监视电流值
初期值:20
4
进行转矩限制的时间
初期值:70
Rev1.00c
机械控制参数
4-22
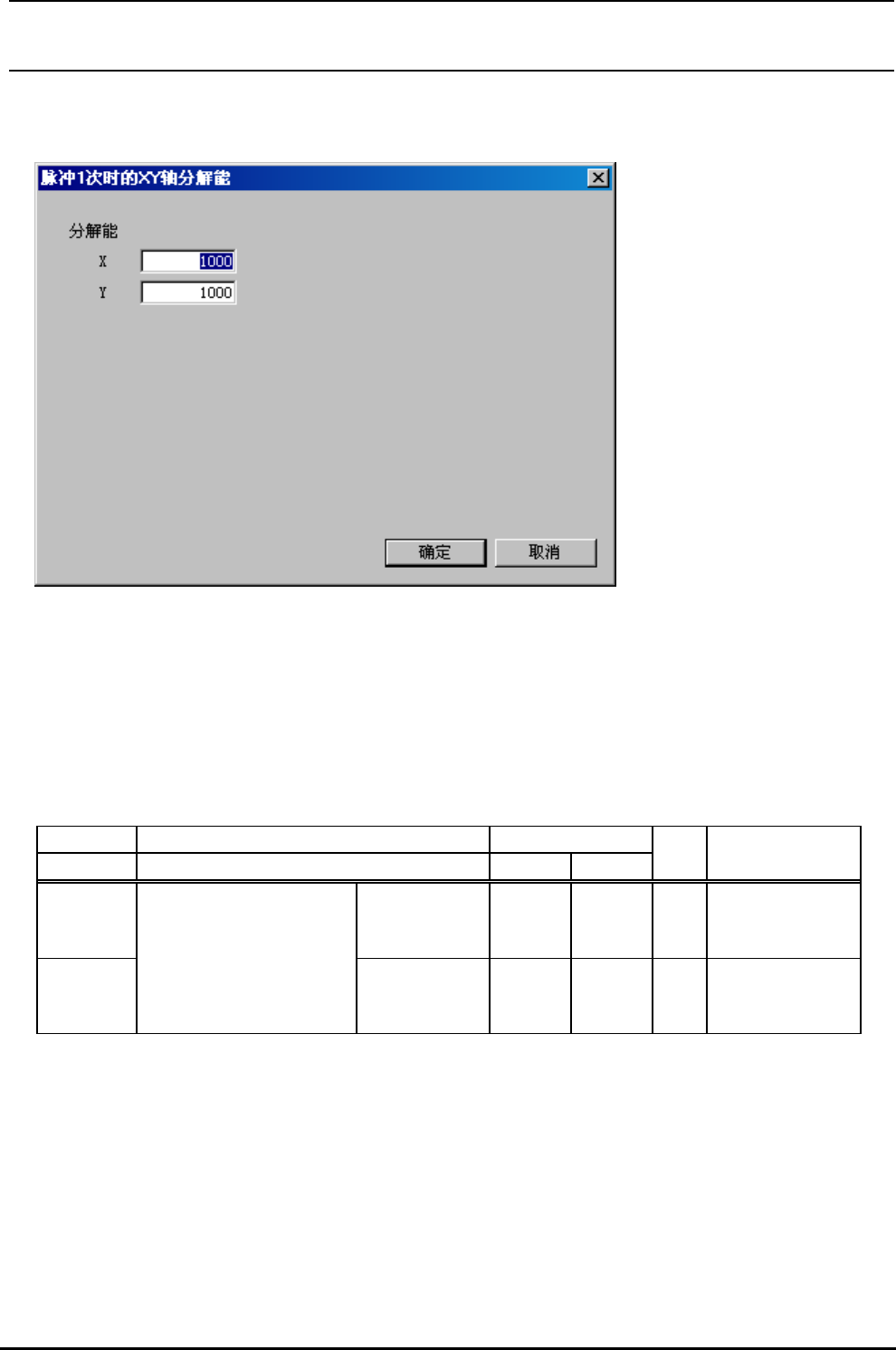
4-2-6 XY 轴分解能
图4-2-6 XY 轴分解能
(1)设定画面的显示方法
菜单∶ [输入]→[XY]→[XY 轴分解能]
起动∶ [XY]按键→[XY 轴分解能]标标→[XY 轴分解能]按键
(2)设定项目
№ 项目 输入范围
最小值 最大值
单
位
备考
1 X
0.00
1μ
m
初期值:1000
(1μm)
2
分解能
Y
0.00
1μ
m
初期值:1000
(1μm)
Rev1.00c
机械控制参数
4-23
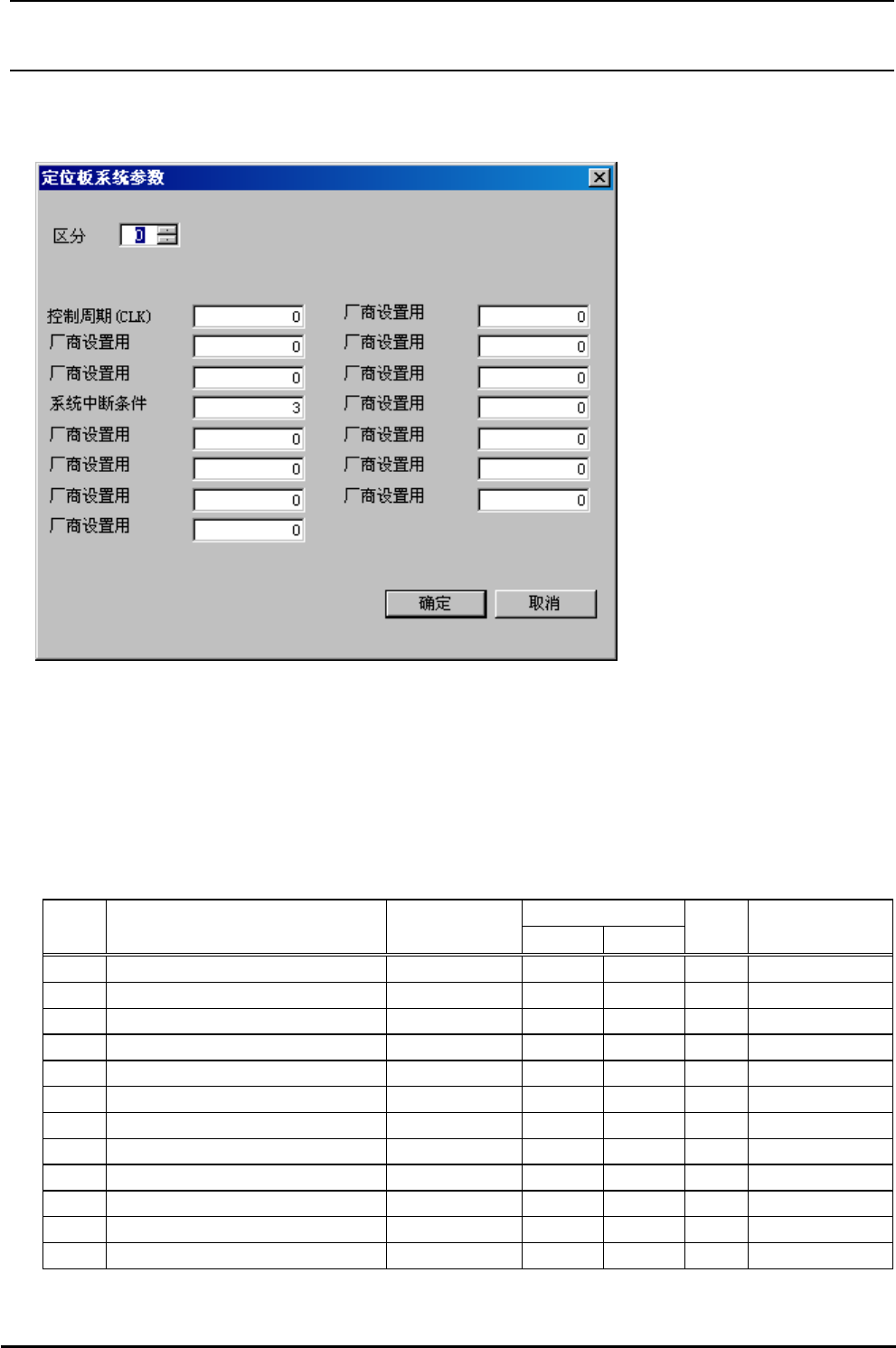
4-2-7 定位板系统参数
图4-2-7 定位板系统参数
(1)设定画面的显示方法
菜单∶ [输入]→[XY]→[伺服参数]→[定位板系统参数]
起动∶ [XY]按键→[伺服参数]标标→[定位板系统参数]按键
(2)设定项目(定位板系统参数按键)
输入范围
№ 项目 简称
最小值 最大值
单位 备考
1 设置 0 1
参照(5)设置
2 控制周期 CLK
Pr.No 001
3 厂商设置用
Pr.No 002
4 厂商设置用
Pr.No 003
5 系统中断条件 SITM
Pr.No 004
6 厂商设置用
Pr.No 005
7 厂商设置用
Pr.No 006
8 厂商设置用
Pr.No 007
9 厂商设置用
Pr.No 008
10 厂商设置用
Pr.No 009
11 厂商设置用
Pr.No 00A
12 厂商设置用
Pr.No 00B