KE-2070_2080机器控制参数.pdf - 第71页
R e v 1 . 00c 机械控制参数 4-28 输入范围 № 项目 简称 最小值 最大值 单位 备考 82 误差过大报警级别 1 MBR 0.1rev Pr.No 0150 83 电磁闸程序输出 MBR ms Pr.No 0151 84 检测器脉冲输出选择 ENRS Pulse/ rev Pr.No 0152 85 功能选择 C-1 COP1 Pr.No 0153 86 功能选择 C-2 COP2 Pr.No 0154 87 厂商设…
Rev1.00c
机械控制参数
4-27
输入范围
№ 项目 简称
最小值 最大值
单位 备考
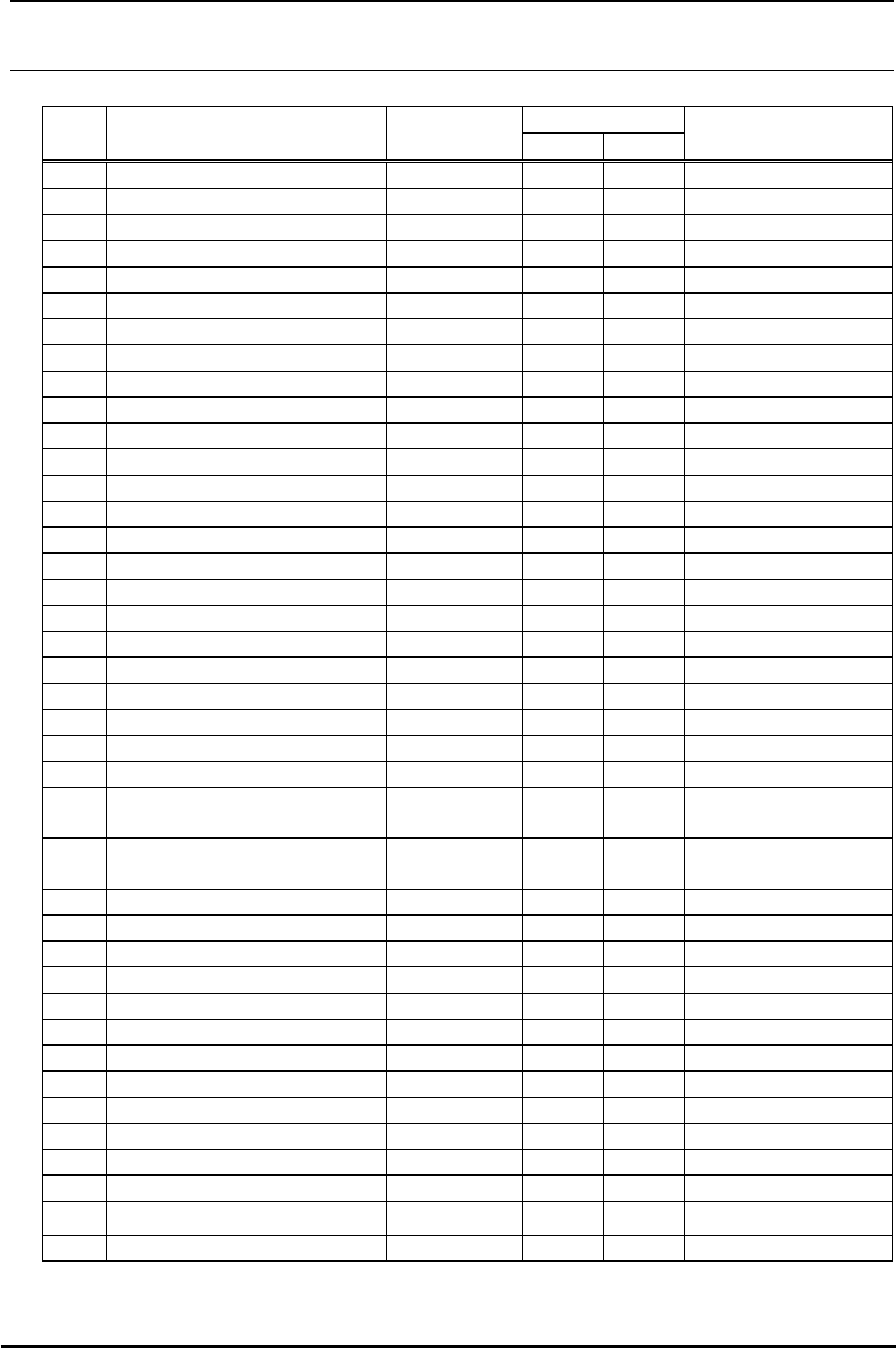
42 速度控制增益 VG2 Rad/s Pr.No 0128
43 速度积分补偿 VIC ms Pr.No 0129
44 速度微分补偿 VDC ms Pr.No 012A
45 厂商设置用 Pr.No 012B
46 机械共振抑制滤波器 1 NH1 Pr.No 012C
47 缺口形状选择 1 NHQ1 Pr.No 012D
48 机器共振抑制滤波器 2 NH2 Pr.No 012E
49 缺口形状选择 2 NHQ2 Pr.No 012F
50 轴共振控制滤波器 NHF Pr.No 0130
51 低通滤波器 LPF Pr.No 0131
52 减振控制 振动频率设置 VRF1 Pr.No 0132
53 减振控制 共振频率设置 VRF2 Pr.No 0133
54 厂商设置用 Pr.No 0134
55 厂商设置用 Pr.No 0135
56 低通滤波器选择 VFBF Pr.No 0136
57 微振抑制控制选择 MVS Pr.No 0137
58 厂商设置用 Pr.No 0138
59 增益切换 选择 CDP Pr.No 0139
60 增益切换 条件 CDL Pr.No 013A
61 增益切换 时间常数 CDT Pr.No 013B
62 增益切换 负荷惯性力矩比 GD2B % Pr.No 013C
63 增益切换 位置控制增益 PG2B Rad/s Pr.No 013D
64 增益切换 速度控制增益 VG2B Rad/s Pr.No 013E
65 增益切换 速度积分补偿 VICB Pr.No 013F
66
增益切换 减振控制 振动频率
设置
VRF1B Pr.No 0140
67
增益切换 减振控制 共振频率
设置
VRF2B Pr.No 0141
68 厂商设置用 Pr.No 0142
69 厂商设置用 Pr.No 0143
70 厂商设置用 Pr.No 0144
71 厂商设置用 Pr.No 0145
72 厂商设置用 Pr.No 0146
73 厂商设置用 Pr.No 0147
74 厂商设置用 Pr.No 0148
75 厂商设置用 Pr.No 0149
76 厂商设置用 Pr.No 014A
77 厂商设置用 Pr.No 014B
78 厂商设置用 Pr.No 014C
79 厂商设置用 Pr.No 014D
80 厂商设置用
Pr.No 014E
81 厂商设置用 Pr.No 014F
Rev1.00c
机械控制参数
4-28
输入范围
№ 项目 简称
最小值 最大值
单位 备考
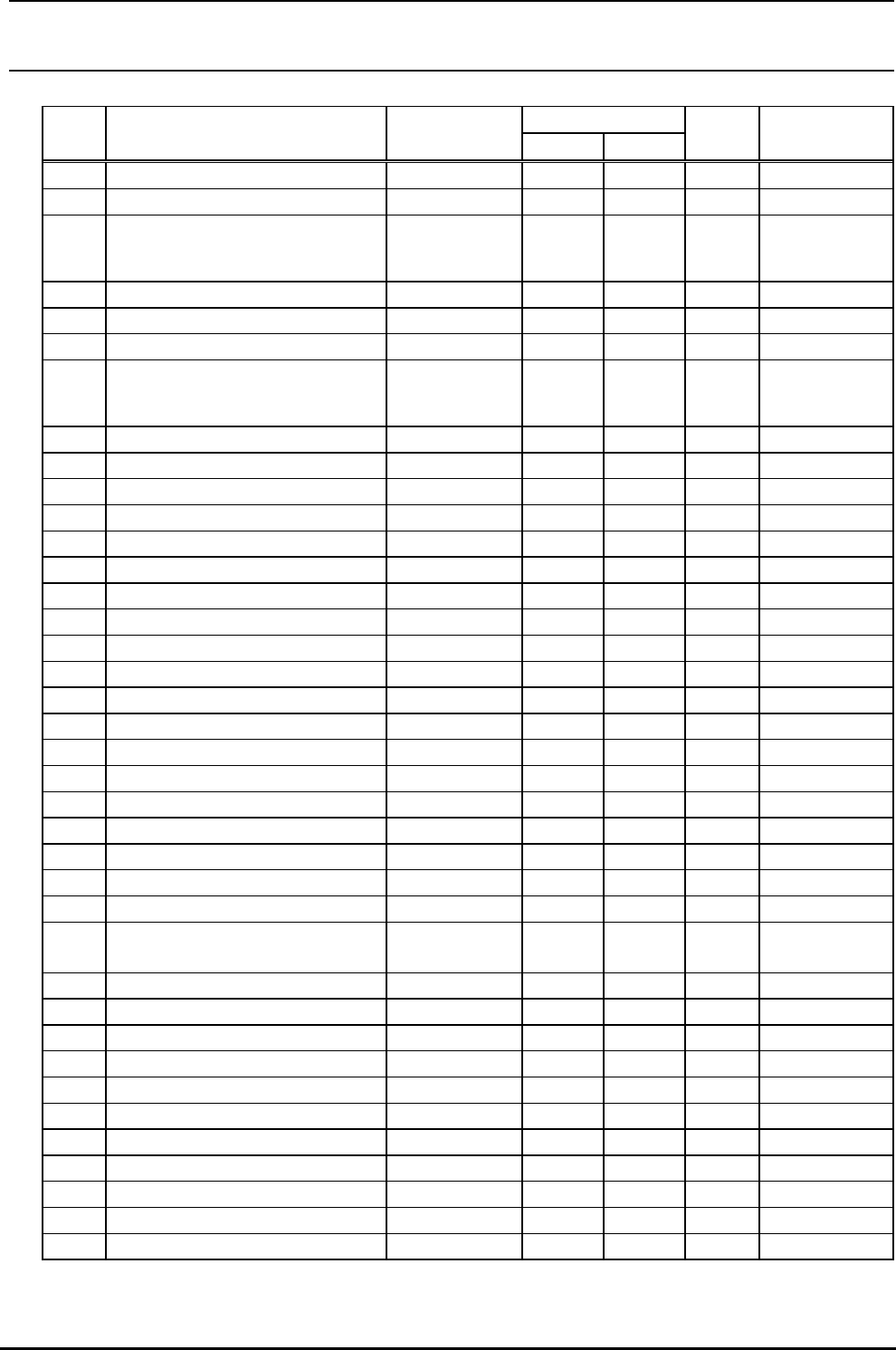
82 误差过大报警级别 1 MBR 0.1rev Pr.No 0150
83 电磁闸程序输出 MBR ms Pr.No 0151
84 检测器脉冲输出选择
ENRS
Pulse/
rev
Pr.No 0152
85 功能选择 C-1 COP1 Pr.No 0153
86 功能选择 C-2 COP2 Pr.No 0154
87 厂商设置用 Pr.No 0155
88 零速度
ZRSP
R/
min
Pr.No 0156
89 厂商设置用 Pr.No 0157
90 模拟监视器 1 输出 MOD1 Pr.No 0158
91 模拟监视器 2 输出 MOD2 Pr.No 0159
92 模拟监视器 1 偏置 MO1 mv Pr.No 015A
93 模拟监视器 2 偏置 MO2 mv Pr.No 015B
94 厂商设置用 Pr.No 015C
95 厂商设置用 Pr.No 015D
96 厂商设置用 Pr.No 015E
97 厂商设置用 Pr.No 015F
98 功能选择 C-4 COP4 Pr.No 0160
99 厂商设置用 Pr.No 0161
100 厂商设置用 Pr.No 0162
101 厂商设置用 Pr.No 0163
102 清除警报历史记录 BPS Pr.No 0164
103 厂商设置用 Pr.No 0165
104 厂商设置用 Pr.No 0166
105 厂商设置用 Pr.No 0167
106 厂商设置用 Pr.No 0168
107 厂商设置用 Pr.No 0169
108
线性编码器脉冲方向(设置增
减)
Pr.No 016A
109 厂商设置用 Pr.No 016B
110 厂商设置用 Pr.No 016C
111 厂商设置用 Pr.No 016D
112 厂商设置用 Pr.No 016E
113 厂商设置用 Pr.No 016F
114 输入信号自动接通选择 1 DIA1 Pr.No 0170
115 输入信号自动接通选择 2 DIA2 Pr.No 0171
116 厂商设置用 Pr.No 0172
117 厂商设置用 Pr.No 0173
118 厂商设置用 Pr.No 0174
119 厂商设置用 Pr.No 0175
Rev1.00c
机械控制参数
4-29
输入范围
№ 项目 简称
最小值 最大值
单位 备考
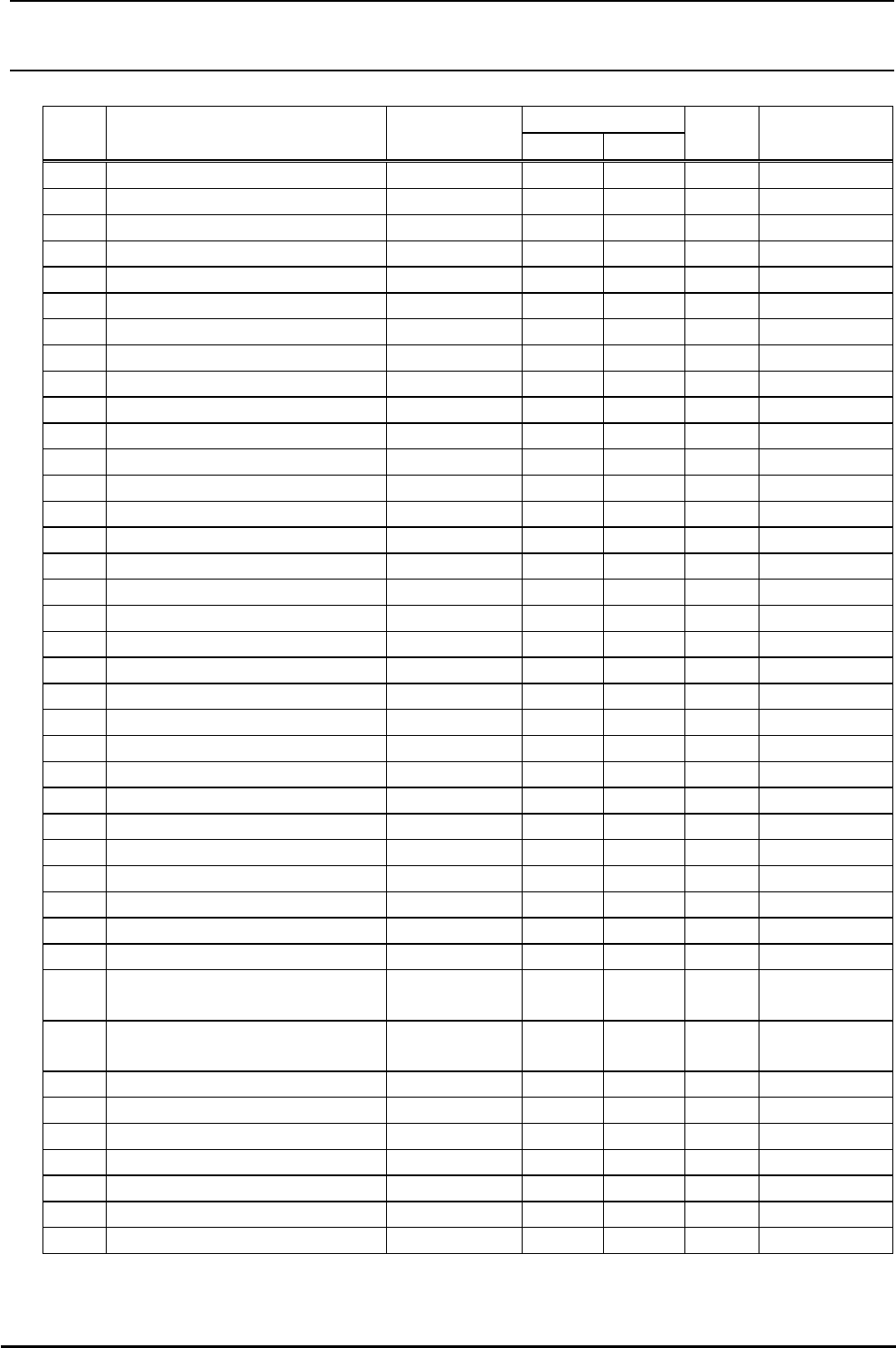
120 输出设备选择 1 DO1 Pr.No 0176
121 输出设备选择 2 DO2 Pr.No 0177
122 输出设备选择 3 DO3 Pr.No 0178
123 厂商设置用 Pr.No 0179
124 厂商设置用 Pr.No 017A
125 厂商设置用 Pr.No 017B
126 厂商设置用 Pr.No 017C
127 功能选择 D-3 DOP3 Pr.No 017D
128 厂商设置用 Pr.No 017E
129 厂商设置用 Pr.No 017F
130 厂商设置用 Pr.No 0180
131 厂商设置用 Pr.No 0181
132 厂商设置用 Pr.No 0182
133 厂商设置用 Pr.No 0183
134 厂商设置用 Pr.No 0184
135 厂商设置用 Pr.No 0185
136 厂商设置用 Pr.No 0186
137 厂商设置用 Pr.No 0187
138 厂商设置用 Pr.No 0188
139 厂商设置用 Pr.No 0189
140 厂商设置用 Pr.No 018A
141 厂商设置用 Pr.No 018B
142 厂商设置用 Pr.No 018C
143 厂商设置用 Pr.No 018D
144 厂商设置用 Pr.No 018E
145 厂商设置用 Pr.No 018F
146 全闭环功能选择 1 Pr.No 0190
147 厂商设置用 Pr.No 0191
148 全闭环控制故障检测功能 Pr.No 0192
149 全闭环电子齿轮 1 分子 Pr.No 0193
150 全闭环电子齿轮 1 分母 Pr.No 0194
151
全闭环控制速度偏差异常检测
电平
Pr.No 0195
152
全闭环控制位置偏差异常检测
电平
Pr.No 0196
153 双反馈滤波器 Pr.No 0197
154 厂商设置用 Pr.No 0198
155 厂商设置用 Pr.No 0199
156 厂商设置用 Pr.No 019A
157 厂商设置用 Pr.No 019B
158 厂商设置用 Pr.No 019C
159 厂商设置用 Pr.No 019D