KE-2070_2080机器控制参数.pdf - 第80页
R e v 1 . 00c 机械控制参数 4-37 输入范围 № 项目 简称 最小值 最大值 单位 备考 79 厂商设置用 Pr.No 025E 80 厂商设置用 Pr.No 025F 81 直线插补组号 LGRP Pr.No 0260 82 直线插补选项 LOP Pr.No 0261 83 直线插补速度限制值 LSL Pr.No 0262 84 并联驱动组 TGRP Pr.No 0264 85 并联驱动同步校正有效宽度 TEV 指令 …
Rev1.00c
机械控制参数
4-36
输入范围
№ 项目 简称
最小值 最大值
单位 备考
42 厂商设置用 Pr.No 0232
43 厂商设置用 Pr.No 0233
44 厂商设置用 Pr.No 0234
45 干涉检测选项 IOP Pr.No 0235
46 干涉检测偏置 IOF
指令
单位
Pr.No 0236
47 干涉检测幅度 IW Pr.No 0238
48 厂商设置用 Pr.No 023A
49 厂商设置用 Pr.No 023B
50 厂商设置用 Pr.No 023C
51 厂商设置用 Pr.No 023D
52 厂商设置用 Pr.No 023E
53 厂商设置用 Pr.No 023F
54 原点复归选项 1 OPZ1 Pr.No 0240
55 原点复归选项 2 OPZ2 Pr.No 0241
56 原点复归速度 ZSP
速度
单位
Pr.No 0242
57 原点复归加速时间常数 ZTCA ms Pr.No 0244
58 原点复归减速时间常数 ZTCD ms Pr.No 0245
59 原点坐标 ZPS
指令
单位
Pr.No 0246
60 原点移位量 ZST
指令
单位
Pr.No 0248
61 原点搜索界限 ZL Pr.No 024A
62 爬行速度 CRF
速度
单位
Pr.No 024C
63 原点多次旋转数据 LSO Pr.No 024D
64 原点 1 转内位置 CYO Pr.No 024E
65 厂商设置用 Pr.No 0250
66 厂商设置用 Pr.No 0251
67 厂商设置用 Pr.No 0252
68 厂商设置用 Pr.No 0253
69 厂商设置用 Pr.No 0254
70 厂商设置用 Pr.No 0255
71 厂商设置用 Pr.No 0256
72 厂商设置用 Pr.No 0257
73 厂商设置用 Pr.No 0258
74 厂商设置用 Pr.No 0259
75 厂商设置用 Pr.No 025A
76 厂商设置用 Pr.No 025B
77 厂商设置用 Pr.No 025C
78 厂商设置用 Pr.No 025D
Rev1.00c
机械控制参数
4-37
输入范围
№ 项目 简称
最小值 最大值
单位 备考
79 厂商设置用 Pr.No 025E
80 厂商设置用 Pr.No 025F
81 直线插补组号 LGRP Pr.No 0260
82 直线插补选项 LOP Pr.No 0261
83 直线插补速度限制值 LSL Pr.No 0262
84 并联驱动组 TGRP Pr.No 0264
85 并联驱动同步校正有效宽度 TEV
指令
单位
Pr.No 0265
86 并联驱动同步校正速度 TES Pr.No 0266
87 并联驱动偏差过大幅度 TEO
指令
单位
Pr.No 0267
88 并联驱动轴单位倍率 TMAG Pr.No 0268
89
并联驱动偏差过大检测开始时
滞
TED ms Pr.No 0269
90 并联驱动偏差校正允许幅度 TOFL
指令
单位
Pr.No 026A
91 并联驱动原点信号偏置 TZOF Pr.No 026B
92 厂商设置用 Pr.No 026C
93 厂商设置用 Pr.No 026E
94 厂商设置用 Pr.No 026F
95 厂商设置用 Pr.No 0270
96 厂商设置用 Pr.No 0271
97 厂商设置用 Pr.No 0272
98 厂商设置用 Pr.No 0273
99 厂商设置用 Pr.No 0274
100 厂商设置用 Pr.No 0275
101 厂商设置用 Pr.No 0276
102 厂商设置用 Pr.No 0277
103 厂商设置用 Pr.No 0278
104 厂商设置用 Pr.No 0279
105 厂商设置用 Pr.No 027A
106 厂商设置用 Pr.No 027B
107 厂商设置用 Pr.No 027C
108 厂商设置用 Pr.No 027D
109 厂商设置用 Pr.No 027E
110 厂商设置用 Pr.No 027F
Rev1.00c
机械控制参数
4-38
4-3 传送
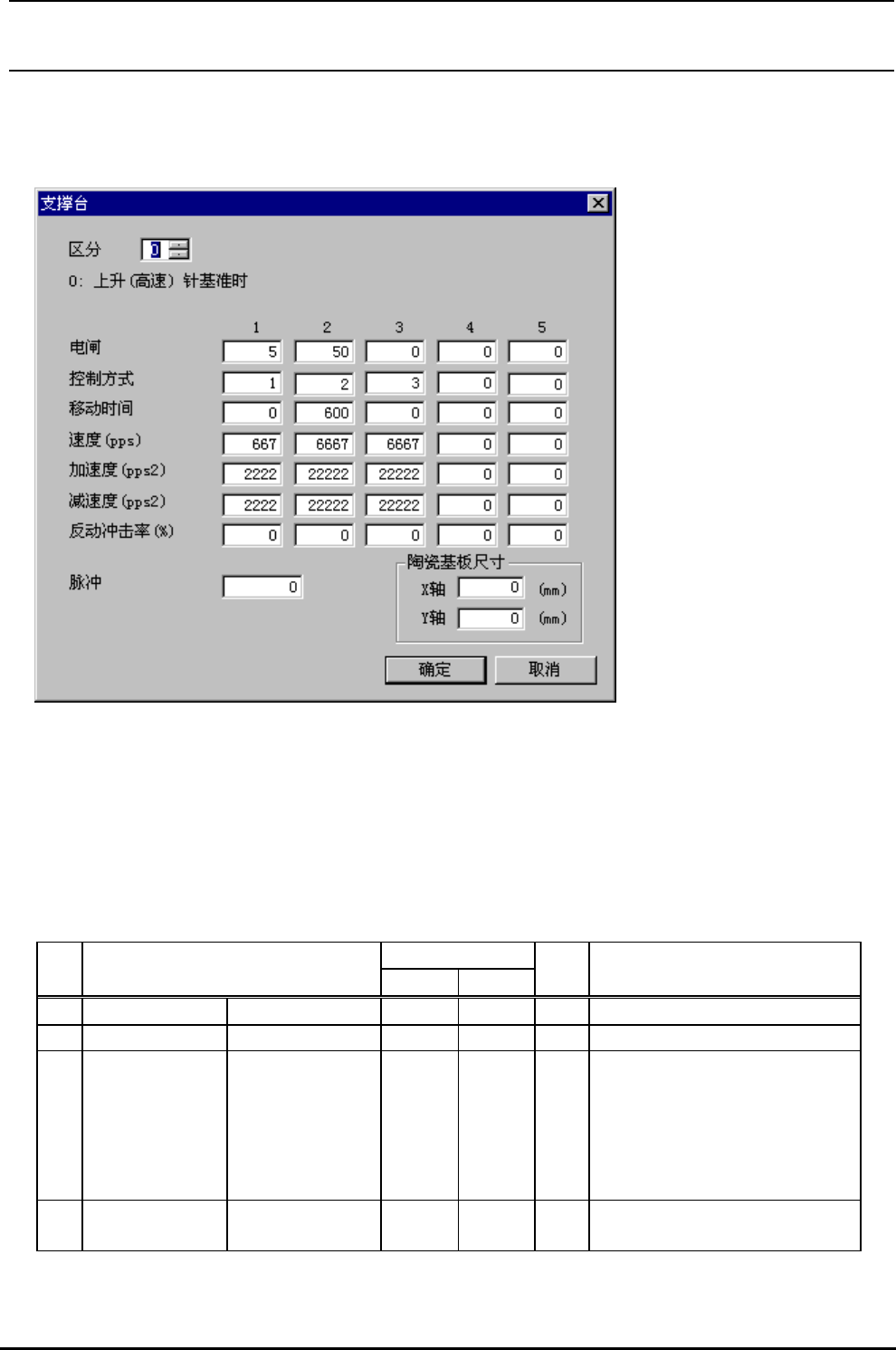
4-3-1 支撑台
图4-3-1 支撑台
(1)设定画面的显示方法
菜单∶ [输入]→[传送]→[支撑台]
起动∶ [传送]按键→[支撑台]按键
(2)设定项目
输入范围
№ 项目
最小值 最大值
单
位
备考
1 区分 0 16 参照(3)区分
2 控制变换 Stroke mm
3 控制方式
1: 加速度固定(速度・时间可
变),
2: 时间固定(速度・加速度可
变),
3: 台形驱动(时间可变/速度・
加速度固定)
4 移动时间 ms
控制方式选择2的时间固定时
设定