JM-50_QA表.pdf - 第19页
QA 表 机种 确认方法 1. 测量各传感器(左 1 处,右 1 处)与 X-LMT 传感器碰块的距离,确认在 0.8 ~ 1.5mm 的范围内。 调整方法 各传感器与 X_LMT 感器碰块的距离在 0.8 ~ 1.5mm 的范围内(目标 1.0mm ) 1. 进行调整,使 X-LMT 传感器碰块与传感器表面的距离为 0.8 ~ 1.5mm (目标 1.0mm )。 原点及极限位置的检测 1. 原点复归不良 2. Y 轴失控时伺服不断开…
QA表
机种
确认方法
1.
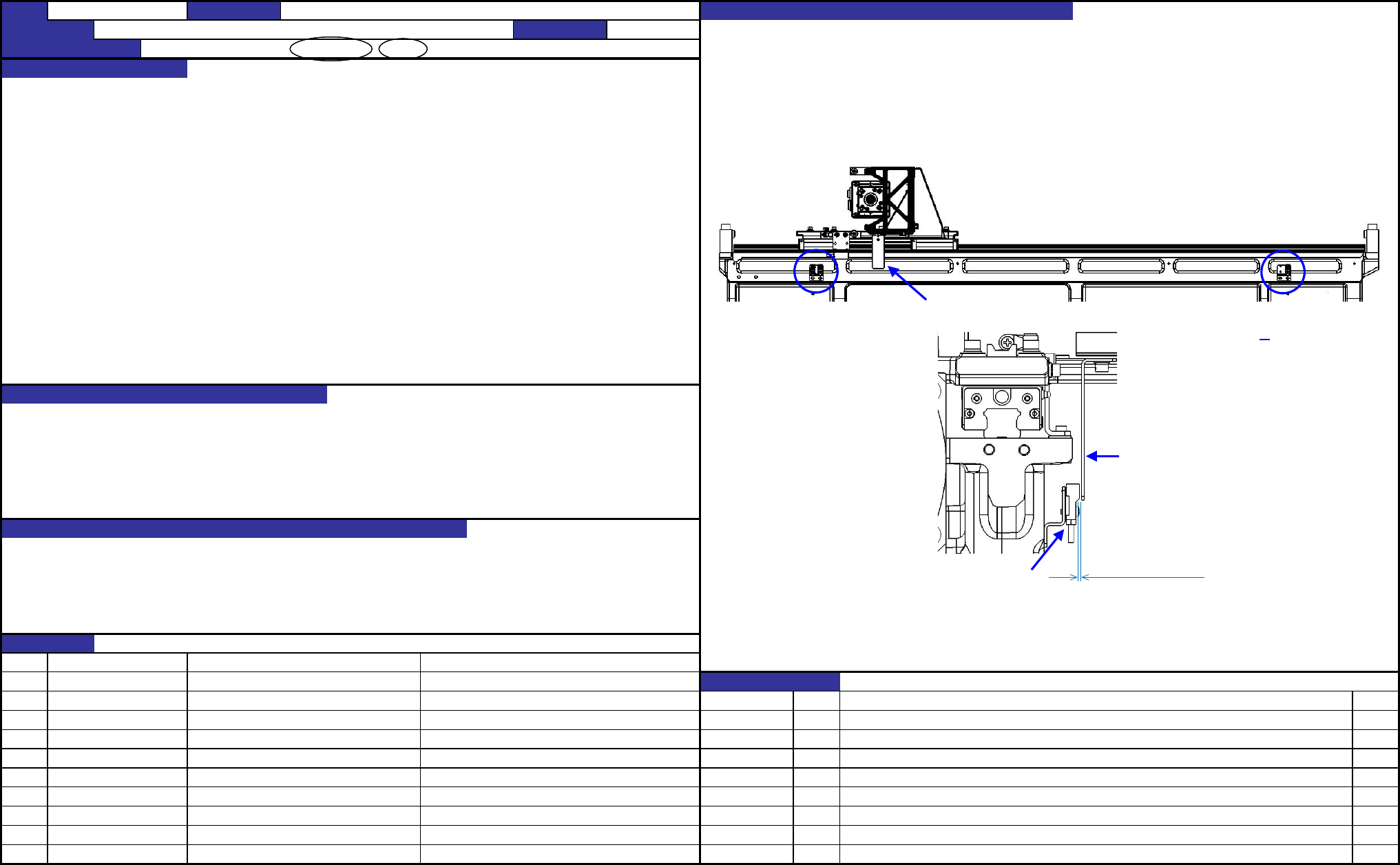
测量各传感器(前
1
处,后
1
处)与
Y
传感器碰块的距离,确认在
0.8
~
1.5mm
的范围内。
调整方法
各传感器与
Y
传感器碰块的距离在
0.8
~
1.5mm
的范围内(目标
1.0mm
)
1.
调整
Y
传感器碰块的位置,使与传感器的距离为
0.8
~
1.5mm
(目标
1.0mm
)。
用
Y
传感器碰块无法调整到位时,要调整
Y
传感器
BR
位置。
原点及极限位置的检测
1.
原点复归不良
2. X
轴失控时伺服不断开,因超負荷而导致损坏
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
预想故障(应规格调整值不良而发生的故障)
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
JM-50
装置名称
XY装置
确认方法及调整方法(故障处理方法)
功能名称
传感器碰块位置(1/
3
)
编制日期
对象元件
内容
日期
40146924
Y_SENSOR_DOG
变更履历
货号
品名
有关质量特性
Y_SENSOR_BR_F_ASM
Y_SENSOR_BR_R_ASM
Y_SENSOR_DOG
0.8~1.5(目标1.0mm)
Y_SENSOR_BR_F_ASM
Y_SENSOR_BR_R_ASM
Y_SENSOR_DOG
1-13
QA表
机种
确认方法
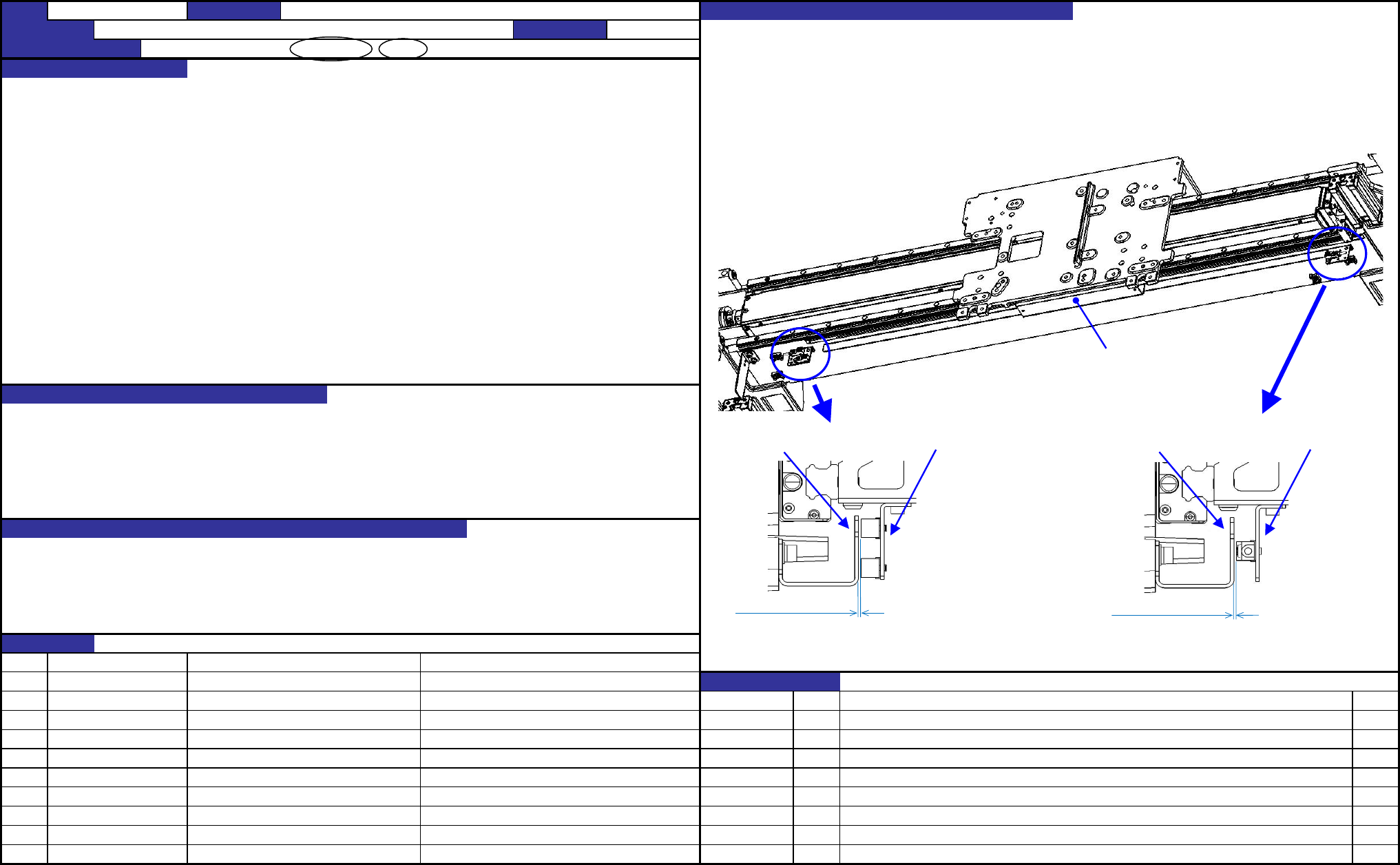
1.
测量各传感器(左
1
处,右
1
处)与
X-LMT
传感器碰块的距离,确认在
0.8
~
1.5mm
的范围内。
调整方法
各传感器与
X_LMT
感器碰块的距离在
0.8
~
1.5mm
的范围内(目标
1.0mm
)
1.
进行调整,使
X-LMT
传感器碰块与传感器表面的距离为
0.8
~
1.5mm
(目标
1.0mm
)。
原点及极限位置的检测
1.
原点复归不良
2. Y
轴失控时伺服不断开,因超負荷而导致损坏
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
JM-50
装置名称
XY装置
确认方法及调整方法(故障处理方法)
预想故障(应规格调整值不良而发生的故障)
质量特性(规格调整值)
功能作用(规格调整值的意义)
功能名称
传感器碰块位置(2/
3
)
编制日期
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
对象元件
内容
40146909
X_LMT_SENSOR_DOG_10A
日期
40146896
X_LMT_SENSOR_DOG_20VA
变更履历
货号
品名
有关质量特性
0.8~1.5(目标1.0mm)
X_MINUS_LMT_SENSOR_ASSY
X_LMT_SENSOR_DOG
0.8~1.5(目标1.0mm)
X_PLUS_LMT_SENSOR_ASSY
X_LMT_SENSOR_DOG
X_LMT_SENSOR_DOG
1-14
QA表
机种
1
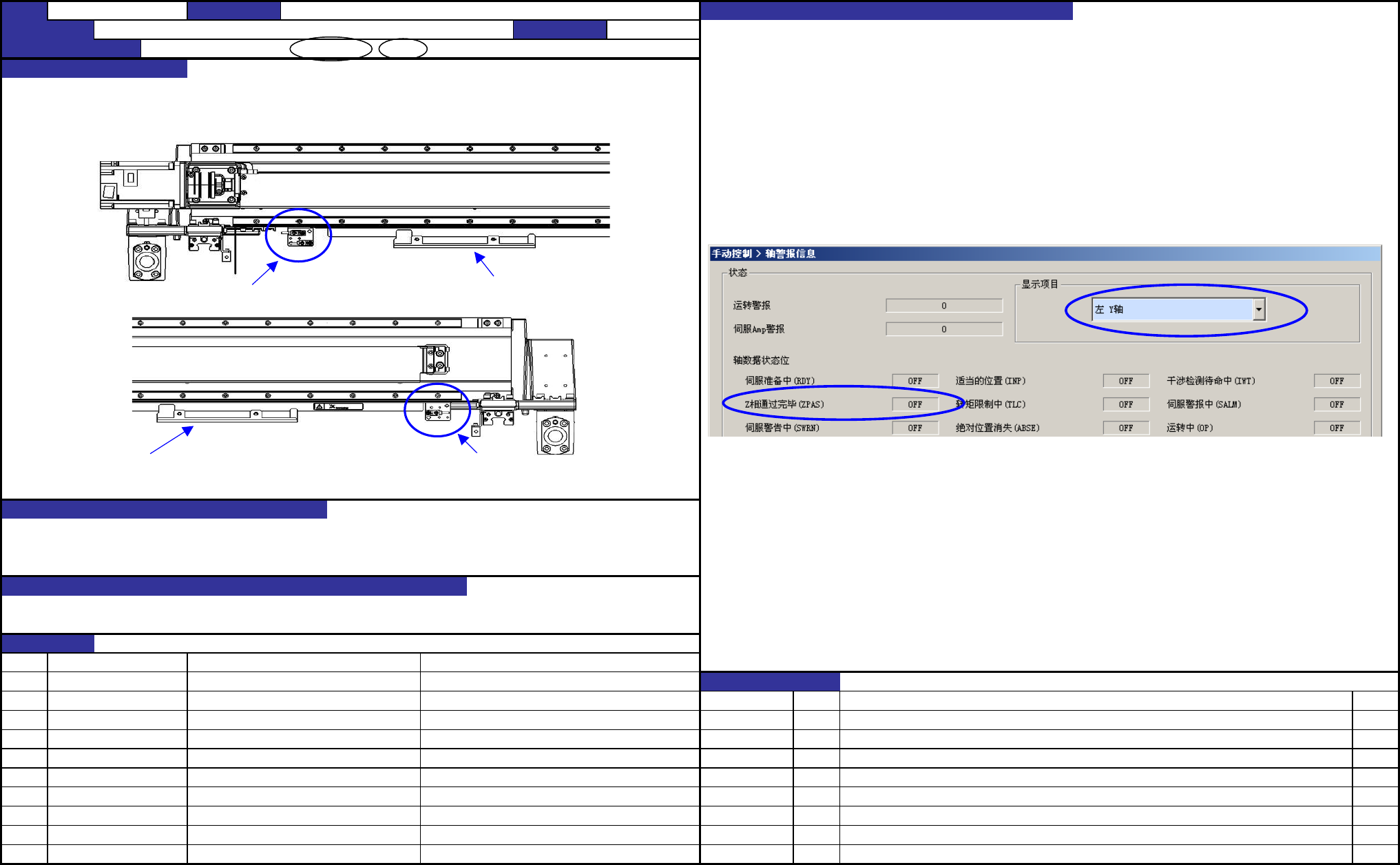
. 给装置接通电源,在进行原点复归动作前以手动进行确认。
2
.
将贴装头向左侧缓慢地移动,当接近传感器的
LED
亮灯时在该位置上停止。
3
.
向
X
方向动作时,测出
X
磁尺原点后传感器碰块应处于不会检测到接近传感器的位置。
4
. 为
OFF
时,移动
X
极限传感器碰块的位置从新启动装置,从操作顺序
1
开始检查。
5.
如为ON,再次从新启动装置。(原点复归不进行)
6. 将贴装头向左侧缓慢地移动,在“②Z相通过完毕(ZPAS)”为ON的位置上停止。
7.
确认接近传感器的LED未亮灯。
原点及极限位置的检测
1.
接通电源时在原点复归动作中发生错误
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
日期
货号
品名
功能作用(规格调整值的意义)
内容
对象元件
变更履历
有关质量特性
预想故障(应规格调整值不良而发生的故障)
确认方法及调整方法(故障处理方法)
功能名称
传感器碰块位置(
3
/
3
)
编制日期
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
装置名称
XY装置
JM-50
质量特性(规格调整值)
通过手动控制→其他→驱动器状況→轴警报状況(下图),选择①X轴,确认
“②Z相通过完毕(ZPAS)”这一项目已为ON。
①
②
X_MINUS_LMT_SENSOR_ASSY
X_LMT_SENSOR_DOG
X_PLUS_LMT_SENSOR_ASSY
X_LMT_SENSOR_DOG
1-15