JM-50_MS.pdf - 第70页
MS 参数 6-1 3D 传感器 参数 6-1 3D 传感器焦点偏差 6-1-1 功能 取得 3D 传感器焦点偏 差。 6-1-2 使用模具 • 焦点偏差用 高度模 具 (402 15939) 为了 判別正反,进 行了凹洞 加工 。使用 时 请把有凹洞 的一面 作为 下侧 凹洞 6-1-3 操作 从菜单中选择 “ 3D 传感器 参数” - “ 调整 3D 传感器焦点偏 差” 后, 会显示 3D 传感器 焦点高度偏 移量的对话框。
MS
参数
5-20
选择要测量的Head。
<操作>
请在裸芯片平台上放置裸芯片。
请选择要测量的贴片头,选择执行。在所选择贴片头的较新贴片头上安装吸嘴,取得偏移量。
在裸芯片的图像识别发生错误时,请执行裸芯片吸取坐标的示教。
在全部贴片头测量结束后,请选择OK,并保存设定。
・测量内容
① 贴片头角度设为 0 度。
② 打开贴片头的真空,吸取裸芯片,并将其移动至校准台。
③ 通过 OCC 识别裸芯片的位置,计 算 出 中心位置和倾斜。此时,如果无法识别裸芯片则
报错。报错时,确认裸芯片的位置。
④ 使贴片头动作,使③测定的裸芯片中心位置与设定的贴片头中心一致,吸取裸芯片。
⑤ 旋转裸芯片并重新放置,使裸芯片角度为 0 度。
⑥ 使贴片头的θ轴旋转-630 度。
⑦ 吸取裸芯片,使θ角度较现在角度旋转+90 度,将裸芯片贴片在吸着坐标上。
⑧ 对贴装的裸芯片进行图像识别,把握姿势。
⑨ 重复⑦⑧的动作直至 540 度。(+方向移动的偏移量)
⑩ 吸取裸芯片,使θ角度旋转到 630 度后旋转到 540 度,贴装到吸取坐标上。
⑪ 对贴装的裸芯片进行图像识别,把握姿势。
⑫ 吸取裸芯片,使θ角度旋转到当前角度-90 度,把裸芯片贴装到吸取坐标上。
⑬ 对贴装的裸芯片进行图像识别,把握姿势。
⑭ 重复⑫⑬的动作直至-540 度。(-方向移动的偏移量)
⑮ ⑥~⑭的动作重复 2 次。
⑯ 对上述方法取得的 2 次偏移量计算平均值,以+方向移动和-方向移动的 0 度上的偏
移量之平均值为基准从各偏移量值中减去。
⑰ 因为-540 度和+540 度是相同的皮带位置,所以将取得的最大角度(540 度)为基
准,分别去除+方向移动、-方向移动的倾斜。
MS
参数
6-1
3D 传感器参数
6-1 3D 传感器焦点偏差
6-1-1 功能
取得3D传感器焦点偏差。
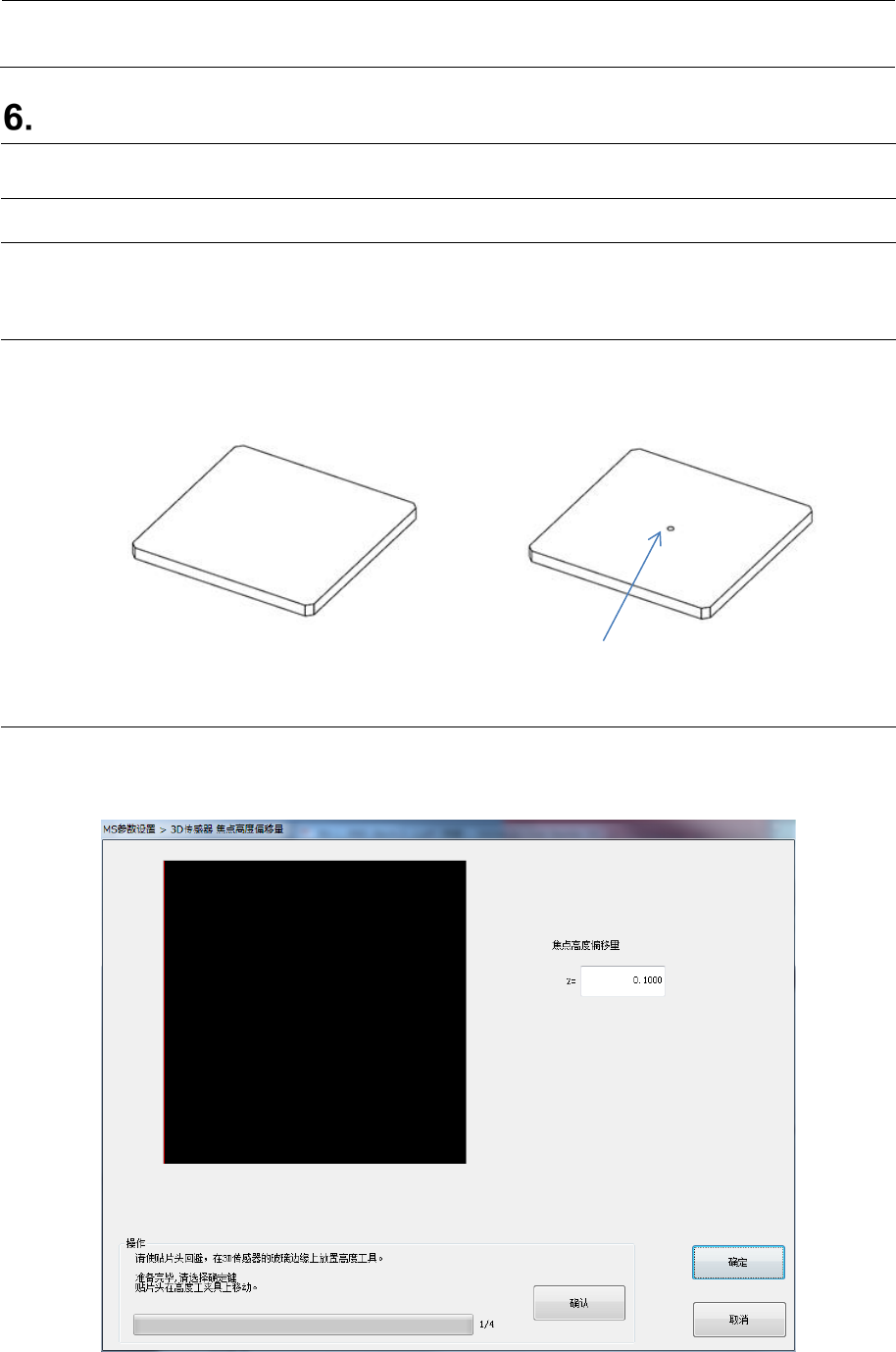
6-1-2 使用模具
• 焦点偏差用高度模具 (40215939)
为了判別正反,进行了凹洞加工。使用时请把有凹洞的一面作为下侧
凹洞
6-1-3 操作
从菜单中选择“3D传感器参数”-“调整3D传感器焦点偏差”后,会显示3D传感器焦点高度偏
移量的对话框。
MS
参数
6-2
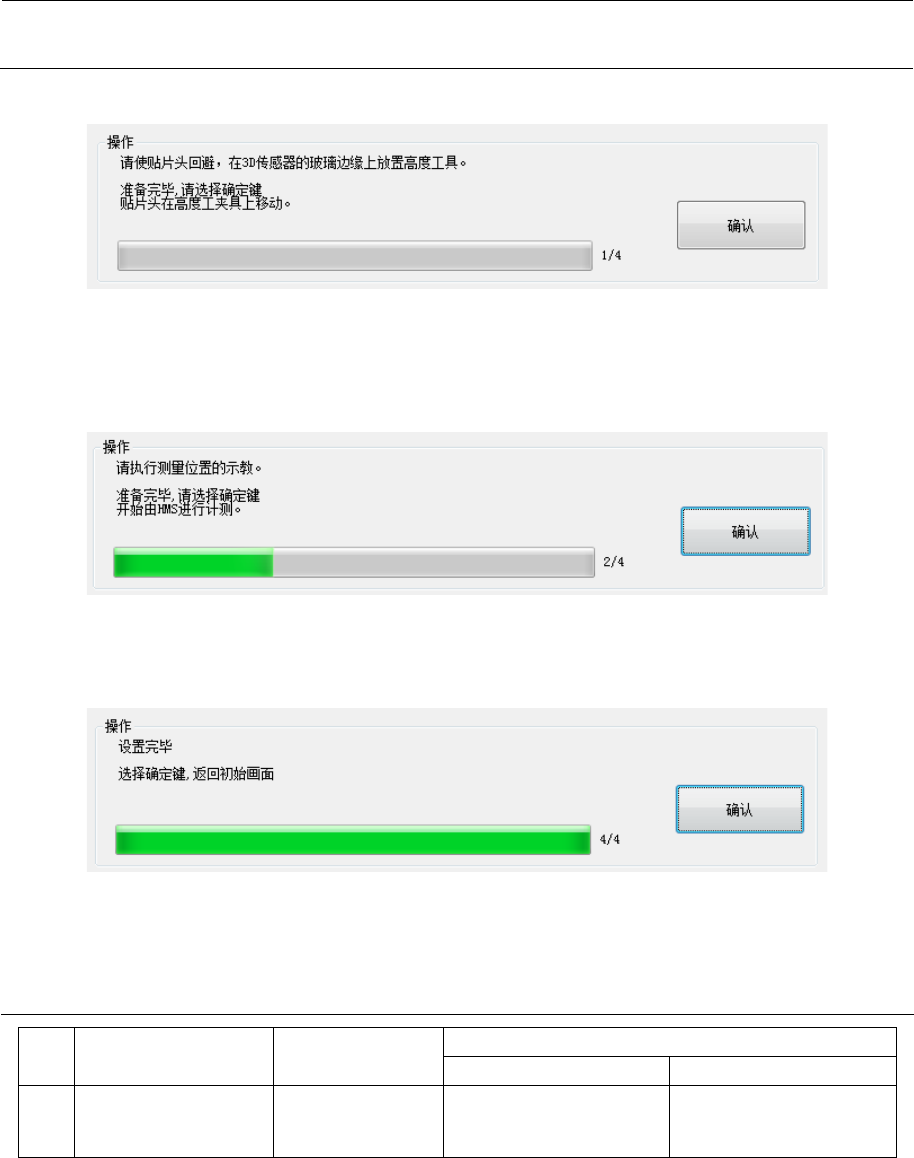
<操作・1/4>
请把高度模具放在3D传感器的玻璃边框上。
准备完成后请选择确认。选择确认后,贴裝头以HMS基准移动到高度模具上。
此时,请注意不要使高度模具碰撞玻璃面。
<操作・2/4>
如测量位置出现偏离,请进行测量位置的示教。
完成准备后,请选择确认。利用HMS取得3D传感器裝置的焦点偏移量。
<操作・4/4>
设定结束。选择“确认”,即返还初始画面。
要退出画面时请去除高度模具。
6-1-4 MSP 容许值
No.
项目 MSP容许值
MSP
值不良时
出现的问题
调整(检测)项目
1
焦点偏移量
±
3.0mm
测定不良
3D
传感器裝置的装配