YSM10安装调整(eng).pdf - 第87页
For Ser v ice E n gineer Service Information SI1610004E -000= YSM10_Proced ures for the adjustmen ts required after installing a machine 87/107 1 1.2 Workflow for when “AMF Index 1“ fal ls below 1.000 After check ing the…
For Service Engineer
Service Information
SI1610004E-000= YSM10_Procedures for the adjustments required after installing a machine
86/107
11. Basic adjustments required when “AMF index 1” falls below 1.000
In the ACP-Chip accuracy check, if the “AMF index 1” value falls below 1.000 even after feeding
back the correction values twice, analyze the measured data on the “VgChart” and perform the
necessary adjustments.
If the mounting is unstable, the AMF index cannot be improved no matter how many times the
adjustment by the ACP-Chip is performed. Check the cause of the problem referring to the
analysis result, and perform the related basic adjustments again.
In case the cause of the problem cannot be identified, perform the “” adjustment for all the
fiducial cameras and the component recognition cameras.
When “AMF Index 1” falls below 1.000 only for the multi camera, perform the “” adjustment
for the multi camera.
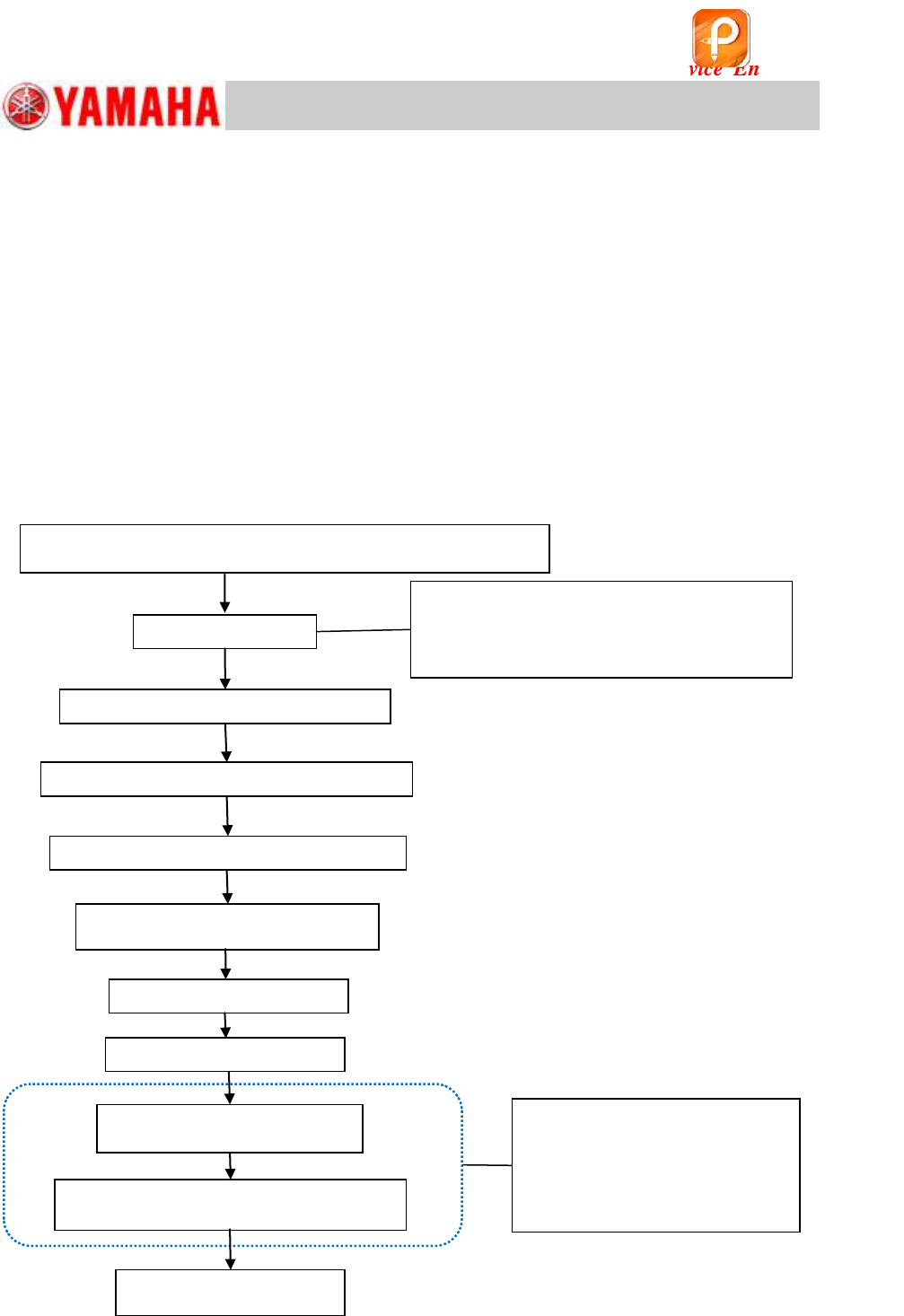
11.1 Flow of the basic adjustment
Figure 129
The result does not fall within the spec even after feeding
back the correction values twice or more in ACP-Chip
Check the VgChart
“Fiducial camera” – “Lightness” adjustment
“Scan camera” – “Lightness” adjustment
整
“Fiducial camera” – “” adjustment
(Option) “Multi Camera” –
“” & “Dual Rec Offset” adjustments
(Option) “Multi Camera” –
“Lightness” adjustment
・ Does the deviation occur to the specific
head?
・ Does the deviation occur repeatedly?
Check the related parts.
When the result does not fall
within the spec. only in the
multi camera, perform the
basic adjustments only for the
multi camera.
“Head Offset Z” adjustment
“PCB Height” adjustment
“Scan camera (Main)” – “” &
“Dual Rec Offset” adjustment
Mounting adjustment
(ACP-Chip)
该文档是极速PDF编辑器生成,
如果想去掉该提示,请访问并下载:
http://www.jisupdfeditor.com/

For Service Engineer
Service Information
SI1610004E-000= YSM10_Procedures for the adjustments required after installing a machine
87/107
11.2 Workflow for when “AMF Index 1“ falls below 1.000
After checking the VgChart and finding the problem, identify the cause of the problem and take
appropriate measures. And then perform the ACP-Chip adjustment again.
If the cause of the problem cannot be identified, perform the adjustment of all the items in “11.3
Adjustments related to the mounting accuracy” a g a i n .
After readjusting the basic adjustments, perform the ACP-Chip adjustment again.
1. Identify the cause of the problem on the VgChart.
Check the tendency of the deviation of the mounting positions on the VgChart.
・ Does the deviation occur repeatedly?
・ Does the deviation occur to all the heads in the same way?
2. Check the following possible causes of the problems assumed by the mounting result on
the VgChart.
・ Is the machine installed properly?
・ Is the board clamped properly?
・ Is the attached to the head properly?
・ Are the components and the mark recognized properly?
・ Any abnormality found in the recognition unit?
(Is the camera installed properly? Are the lenses clean?)
・ Others
3. Readjust the basic data.
If the cause of the problem can be identified, readjust the related basic data.
See “11.3 Adjustments related to the mounting accuracy” for the adjustment items.
When any error occurs in the ACP-Chip adjustment by the main camera
Perform the adjustment for all the cameras.
When any error occurs in the ACP-Chip adjustment by the sub camera
Perform the adjustment only for the sub camera.
When any error occurs in the ACP-Station adjustment by the sub camera.
Feedback the correction values instead of readjusting the basic data.
4. Check the mounting accuracy after feeding back the correction values.
After saving the correction values in the machine data, perform the ACP-Chip accuracy check
again.
该文档是极速PDF编辑器生成,
如果想去掉该提示,请访问并下载:
http://www.jisupdfeditor.com/
For Service Engineer
Service Information
SI1610004E-000= YSM10_Procedures for the adjustments required after installing a machine
88/107
11.3 Adjustments related to the mounting accuracy
When performing the basic adjustments for the machine, read the board data for adjustment
“MCH_SETUP” beforehand.
11.3.1 Fiducial camera - “” adjustment
Perform the “” adjustment by recognizing the
0.5mm mark on the board.
1. Set the board for the adjustment on the conveyor.
2. Trace the “Board offset” position (
0.5mm mark on the board).
Caution:
If the machine is equipped with the optional sub camera, the camera closer to the mark is automatically
selected. Check the camera that has moved to the mark position.
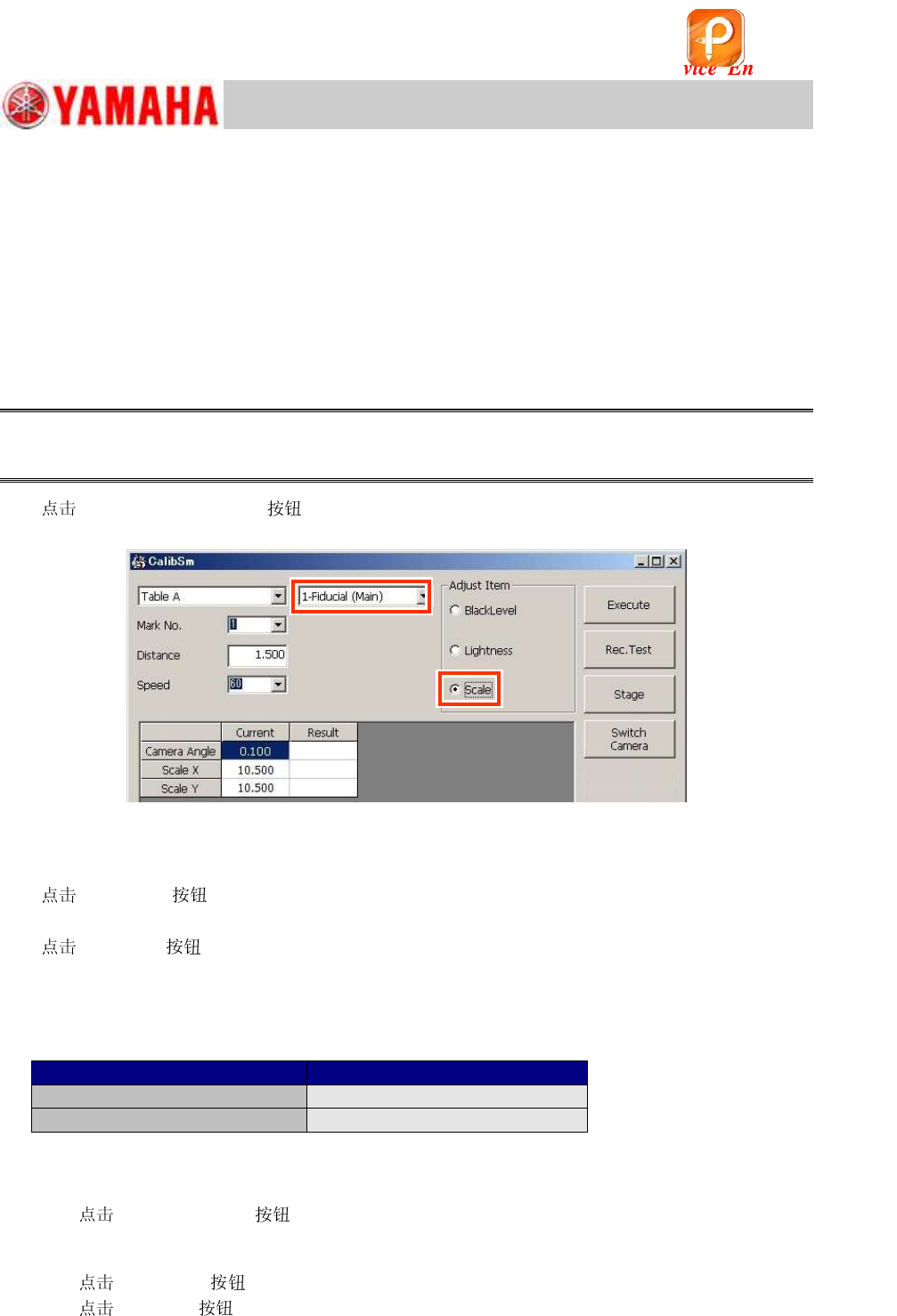
3.
[007 Fiducial camera] on the CalibSm main menu, and select “” from
“Adjust Item”.
Figure 130
4. Select the camera.
Select the camera that has moved to above the
0.5mm mark (“Board offset” position).
5.
[Rec Test] .
After the mark is recognized, the camera moves to the center of the mark.
6.
[Execute] .
The camera moves 1.5mm to the X and to the Y directions, and the and the camera angle
are measured.
7. Check the measurement results and save the data.
Make sure that the values meet the specification and save them.
Item
Specified value
Fiducial Camera X, Y
10.280 ~ 10.880
m
Camera Angle
0.000 +/- 0.500 degrees
Table 39
8. If the machine is equipped with the optional sub camera, perform the adjustment for both
the cameras.
1) [Switch Camera] .
The other camera moves to above the
0.5mm mark and the setting of the Camera type is
switched automatically.
2)
[Rec. Test] .
3)
[Execute] .
4) Check the measurement results and save the data.
该文档是极速PDF编辑器生成,
如果想去掉该提示,请访问并下载:
http://www.jisupdfeditor.com/