F4000N_revD.pdf - 第105页
F4000N Series Operating Manual Section 7: Error M essages and Specifications Part # 562187N - 1 Rev . D Sep 2012 104 © 20 12 Fisnar Inc. 2.5 Input / Outp ut Schematic 2.6 Input / Outp ut Power Specif ications F43 00 N/ F…
F4000N Series Operating Manual
Section 7: Error Messages and Specifications
Part # 562187N-1
Rev. D Sep 2012
103
© 2012 Fisnar Inc.
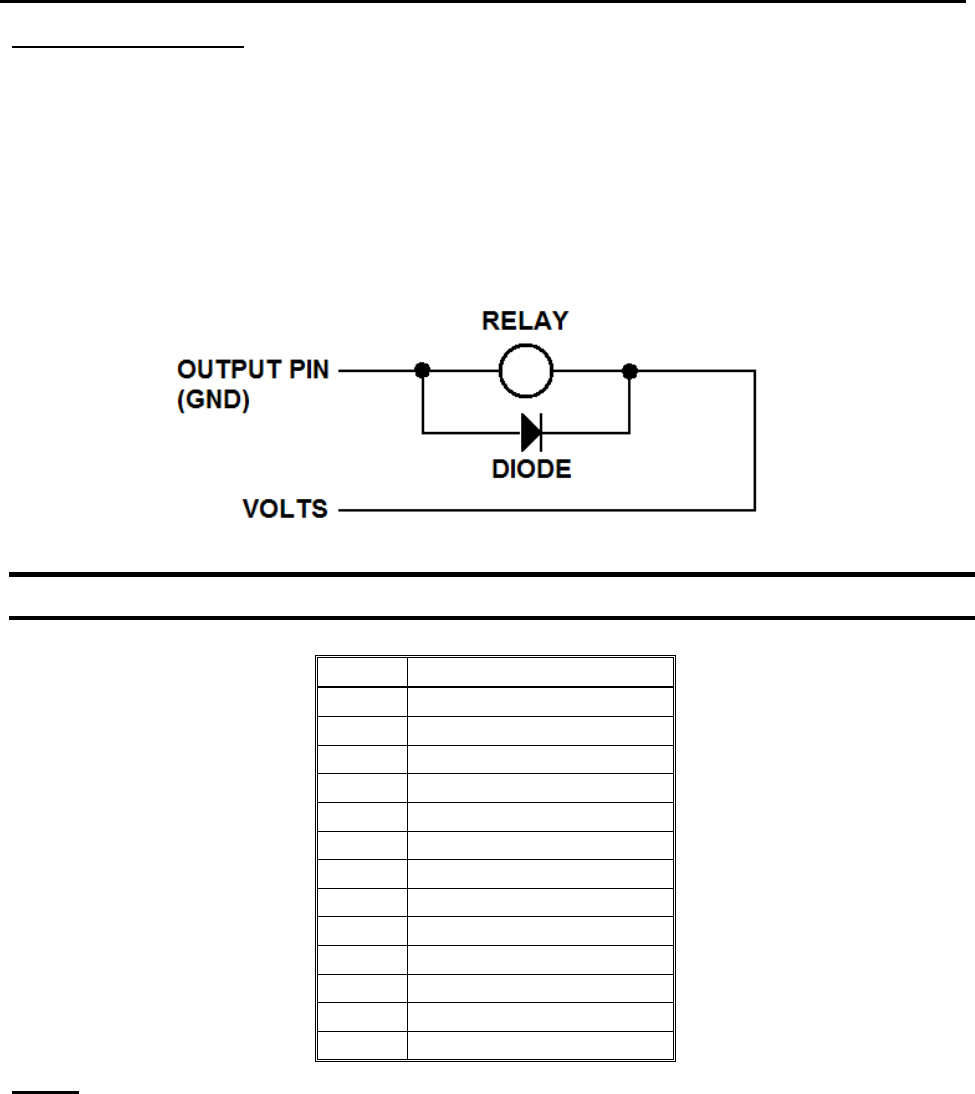
IMPORTANT NOTES:
1. Output signals should be used only to drive external relays. Do not power external
devices directly through output signals. Electrical noise will damage the output
signal relay.
2. If an inductive load (such as a relay) is connected to an output signal, be sure to
install a diode as shown to prevent damage to the output photocoupler:
2.4 Input Signals
Pin #
Description
1
IN # 1
2
IN # 2
3
IN # 3
4
IN # 4
5
IN # 5
6
IN # 6
7
IN # 7
8
IN # 8
9
Reserve
10
Reserve
11
GND
12
GND
13
GND
Notes:
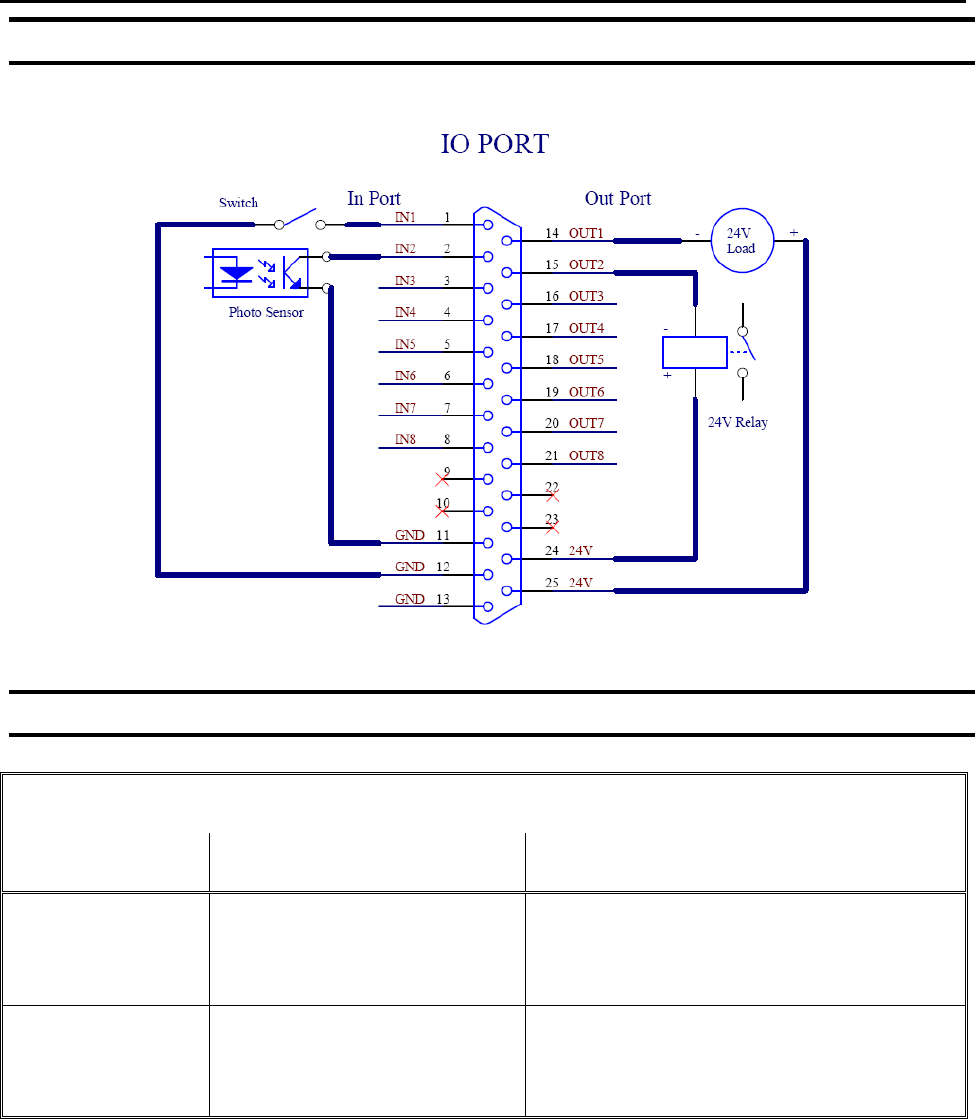
1. To close an input signal, short the circuit between the input pin (1 – 8) and a
GND(ground) pin (pins #11 - 13).
2. Input signals are powered by the robot‟s internal power supply: 24 volts, maximum 2.5
mA
3. Check the status of an input signal using the SET I/O command (see
SECTION 5:1.15 - Set I/O). When the input pin (pin 1 – 8) is connected to a GND pin
(pin #11 - #13), the value of the input is 0.
+24
F4000N Series Operating Manual
Section 7: Error Messages and Specifications
Part # 562187N-1
Rev. D Sep 2012
104
© 2012 Fisnar Inc.
2.5 Input / Output Schematic
2.6 Input / Output Power Specifications
F4300N/ F4400N/ F4500N
Inputs
(Internal Power Supply)
Outputs
(Internal Power Supply)
MAXIMUM
Voltage
24 VDC
24 VDC
MAXIMUM
Current
2.5 mA
250 mA

F4000N Series Operating Manual
Section 7: Error Messages and Specifications
Part # 562187N-1
Rev. D Sep 2012
105
© 2012 Fisnar Inc.
2.7 Robot External I/O Card
The F4000N robots have an optional accessory I/O Card (P/N: A113005103-C) which can
be used to power external devices for longer periods of time.
Please contact Fisnar for more details.
Dispenser
Connected to
OUTPUT# 2
Dispenser
Connected to
OUTPUT# 5
Dispenser
Connected to
OUTPUT# 8
Robot
I/O
COM2
NO2
COM5
NO5
COM8
NO8
Dispenser
Connected to
OUTPUT# 2