F4000N_revD.pdf - 第23页
F4000N Series Operating Manual Section 3: T eaching Overview Part # 562187N - 1 Rev . D Sep 2012 22 © 20 12 Fisnar Inc. 3.4 Menu 2 (F3) Below is a list of functions, which are found under the F3 key: Function Description…
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
21
© 2012 Fisnar Inc.
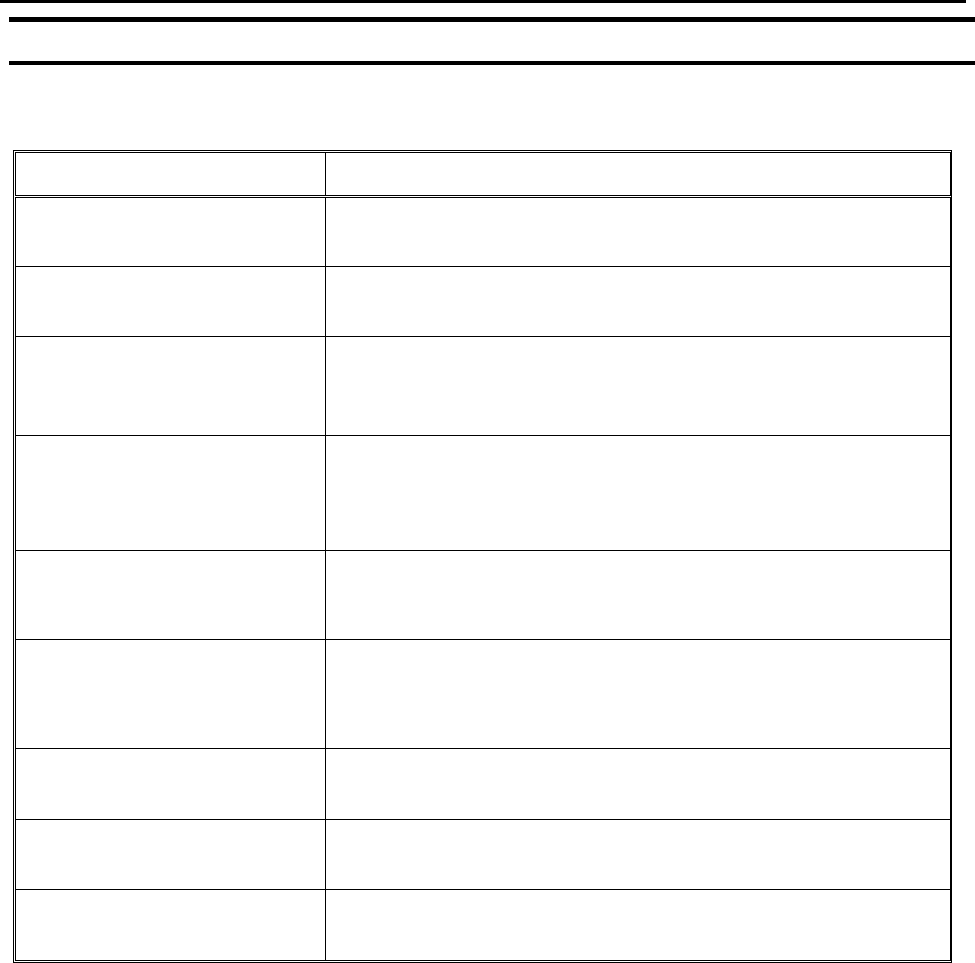
3.3 Utility Menu (Within Menu1)
Below is a list of functions, which are found under Menu 1 (F2) -> Utility Menu:
Function
Description
Program
Opens the Program utility menu. Allows programs to be
copied, backed up, restored, or cleared.
Memory
Opens the Memory utility menu. Allows the robot
memory to be backed up, restored, or cleared.
Teach Pendant
Opens the Teach Pendant utility menu. Allows the
current program to be copied to the Teach Pendant for
transferring to another robot.
Relocate Data
Allows the position of a program to be corrected using
two reference points. Corrects for X offset, Y offset and
angle of rotation.
Lock Program
Locks or unlocks a program to enable or disable
program editing.
Password Setup
Allows the password to be set or reset for the current
program. Protects the program from unauthorized
editing.
Cycle Counter
Allows the operator to set a number to the program
cycle to run the program a number of times.
Key Beep
Enabling Key Beep to produce a beep every time a key
in the Teach Pendant is touched.
Test Function
Testing the Robot Sensor, Panel Connector, Input
Output signal, Teach Pendant and Motor.
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
22
© 2012 Fisnar Inc.
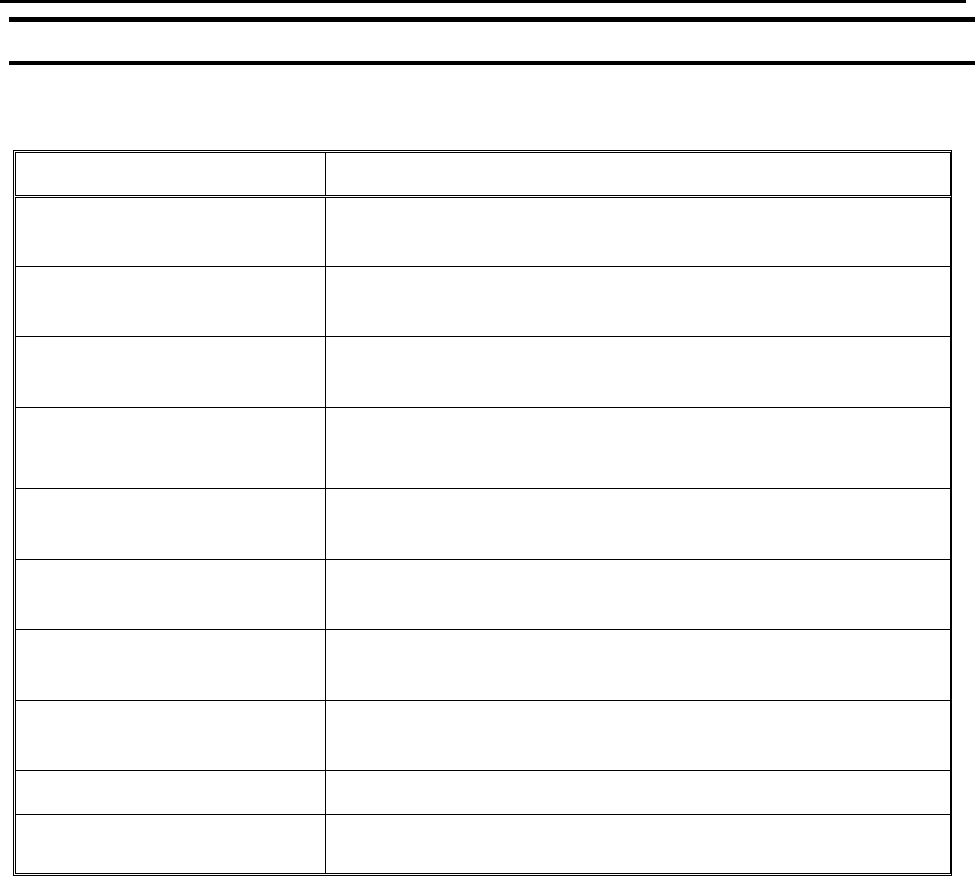
3.4 Menu 2 (F3)
Below is a list of functions, which are found under the F3 key:
Function
Description
Numerical Move
Allows the tip to be positioned numerically by entering a
number for the X, Y and Z values.
Save Temp Point
Saves the current XYZ position in a temporary memory
area numbered 1 – 9.
Move To Temp Point
Retrieves a XYZ position, which was stored with Save
Temp Point.
Undo Program
Cancels the last change to the program. Returns to the
program state prior to the last change.
Redo Program
Restores the last change to the program, which was
canceled with Undo.
Debug Program
Runs the program in Debug mode starting at the current
point location.
Move To Home Position
Causes the tip to move to the home position. The default
home position is X=0, Y=0, Z=0.
System Information
Displays system information, including software version
number, work area size and control board version.
Execute Point
Runs a selected command.
Program List
Allows the operator to see all programs in the memory.
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
23
© 2012 Fisnar Inc.
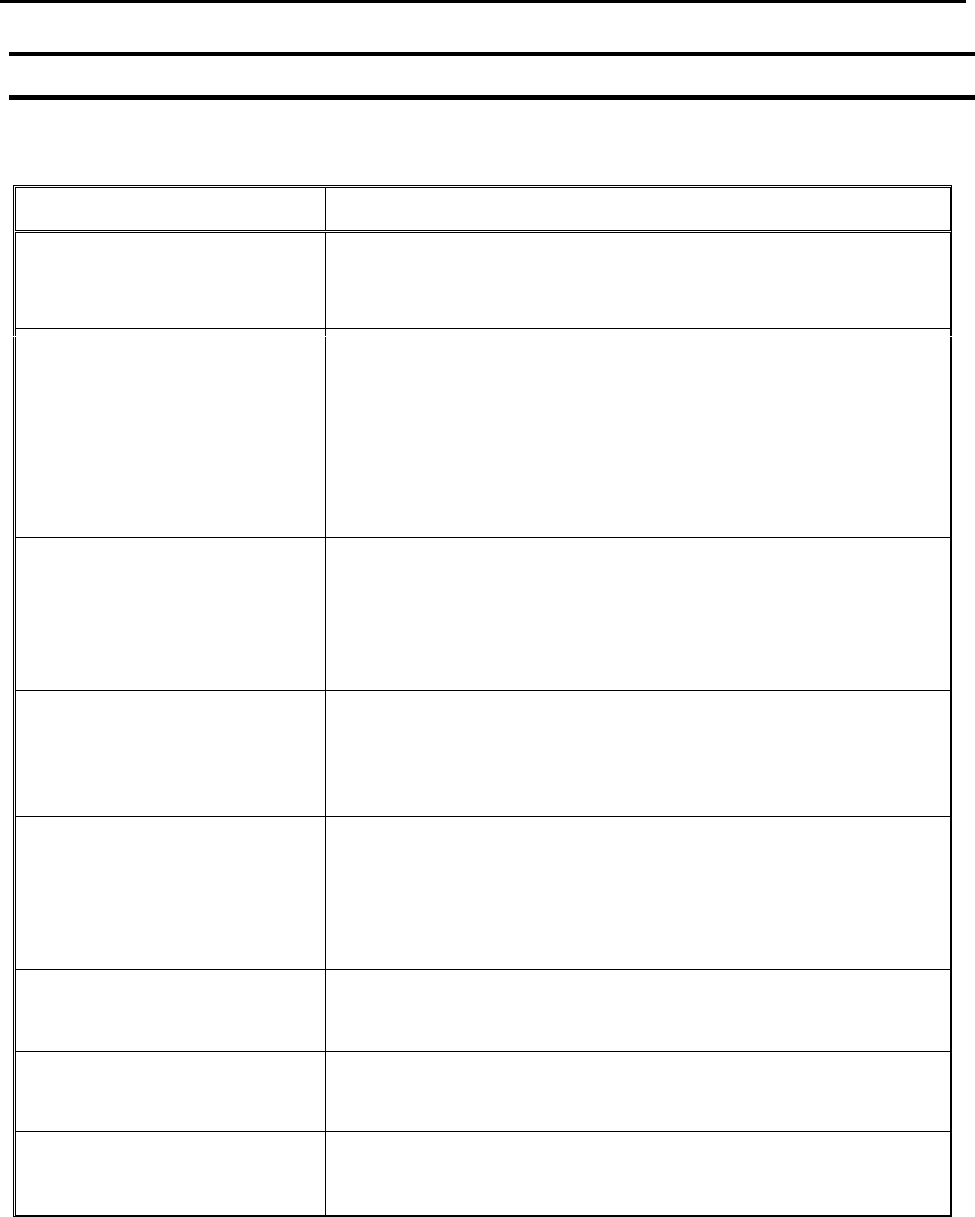
3.5 Setup Menu (F4)
Below is a list of functions, which are found under the F4 key (Setup menu):
Function
Description
Line Speed
Registers the LINE SPEED used for all lines from the
current memory address forward until another Line
Speed instruction is found.
Line Dispense Setup
Registers the LINE DISPENSE SETUP values which
sets dispensing wait time at the start of lines („head‟
time), wait time at the passing points („Node‟ time) and
waiting time at the end of lines („tail‟ time). The
registered values will be used from the current memory
address forward until another Line Dispense Setup
instruction is found.
Point Dispense Setup
Registers POINT DISPENSE SETUP values, which sets
dispensing time and waiting time at the end of
dispensing („tail‟ time) for dots. The registered values will
be used from the current memory address forward until
another POINT DISPENSE SETUP instruction is found.
Dispense End Setup
Registers the height and speed the tip should raise at
the end of dispensing. The registered values will be
used from the current memory address forward until
another DISPENSE END SETUP instruction is found.
Z Clearance
Registers the additional distance the tip should rise,
beyond the height set in Dispense End Setup, to allow
obstacles to be cleared as the tip moves from one figure
to another. Values will be used until another Z Clearance
instruction is found.
XY Move Speed
Sets the movement speed of the X and Y axes when
moving from one figure to another in the program.
Z Move Speed
Sets the movement speed of the Z-axis when moving
from one figure to another in the program.
Home Position Setup
Changes the position the robot moves to at the end of a
program cycle.