F4000N_revD.pdf - 第65页
F4000N Series Operating Manual Section 5: Point T ype & Function Reference Part # 562187N - 1 Rev . D Sep 201 2 64 © 20 12 Fisnar Inc. 2.6 Debug Speed (mm/s) Debug Speed allows the debug speed to be set. This speed i…
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
63
© 2012 Fisnar Inc.
2.3 Program Name
Program Name allows the user to register a name for the current program. If a program
name is registered, it will appear on the display when that program is selected in Run
mode.
2.4 Z-axis Limit (mm)
Z-axis Limit allows the user to limit the range of the Z-axis.
Use the Z and Z keys to bring the Z-axis to the highest and lowest point the Z-axis
should be allowed to travel (the highest Z-axis numeric value), then select F2 (Menu 1), 4.
Z-axis Limit. (mm)
The Z-axis range of motion will be limited to the current value.
2.5 Initial Output Port
Initial Output Port sets the ON/OFF status of the output signals at the start of each
program cycle.
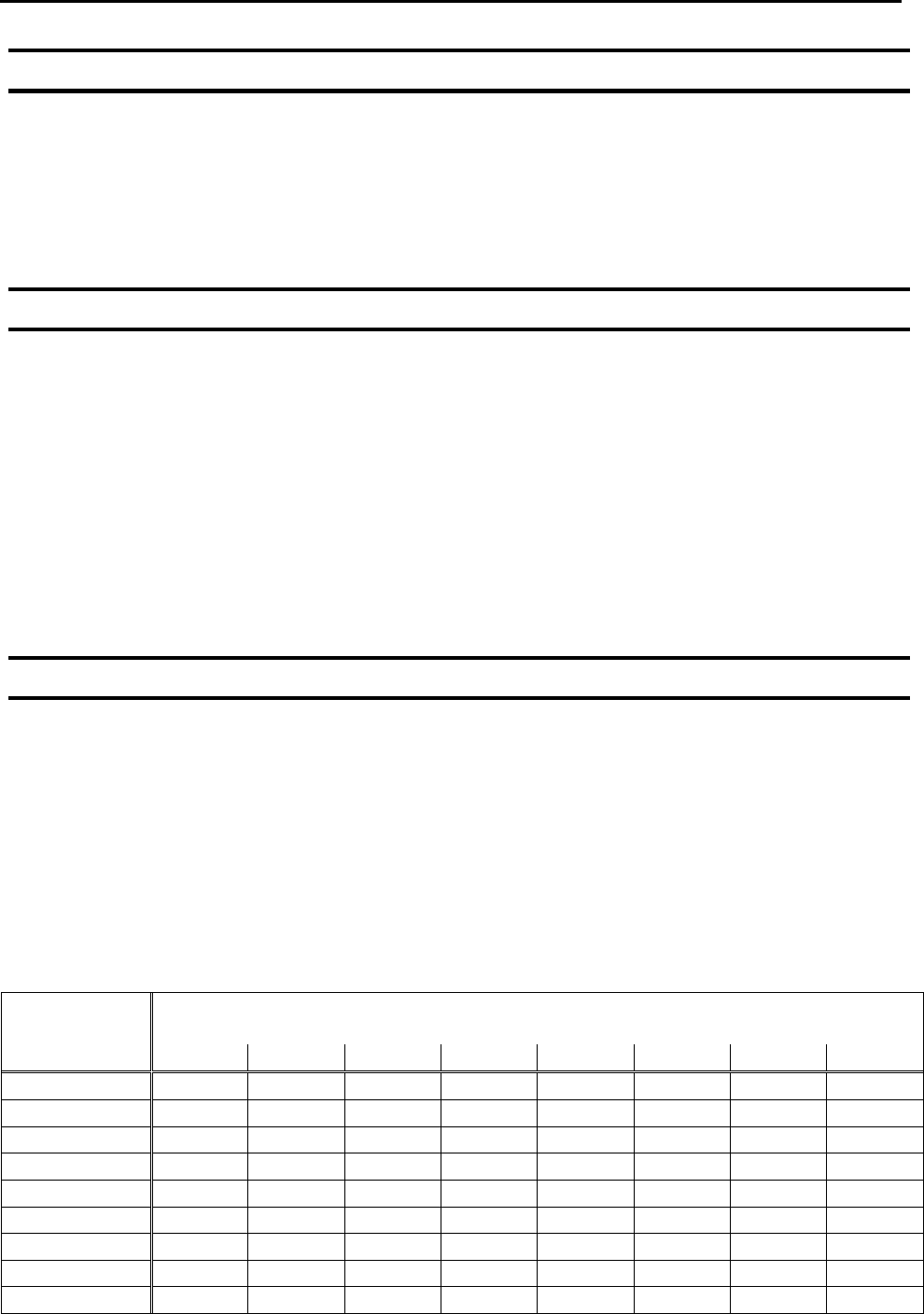
Initial Output Port value is the decimal representation of an 8 binary bit values controlling
the 8 output signals.
For example,
Decimal
Value
Output Status
(X = on, blank = OFF)
#1
#2
#3
#4
#5
#6
#7
#8
0
1
X
2
X
4
X
8
X
16
X
32
X
64
X
128
X
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
64
© 2012 Fisnar Inc.
2.6 Debug Speed (mm/s)
Debug Speed allows the debug speed to be set. This speed is the speed at which the tip
will move when running in Debug mode. See also SECTION 5:4.6 Debug Program
2.7 Utility Menu
Opens the Utility Menu. See SECTION 5:3 Utility Menu (within menu 1).
2.8 Jog Speed
The Jog Speed setting allows the user to select the jog speed for programming in Teach
mode. The Jog speed can be set to Low, Middle or High speed.
The default value is 2. Middle.
2.9 Adjust Origin
Allows the position of a program to be corrected using the reference points. Corrects: X
offset, Y offset. Please refer to SECTION 5:5.9 Adjust Position Setup
2.10 Control by RS232
This command allows the robot to be controlled via the RS232 port. This is possible with
the Fisnar Windows software package Robot Edit feature.
To enable or disable this functionality, select F2 (Menu 1) Control by RS232 and select
Enable or Disable.

F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
65
© 2012 Fisnar Inc.
2.11 Resume
Once a program has been interrupted, the Resume setting will determine if the program
restarts from point # 1 or from the point at which it was interrupted, such as the middle of a
program.
If Resume is set to 1 and a program is stopped by an emergency stop signal or by the
enclosure door switch open signal, the program will restart from the point at which it was
interrupted when the start button is pressed.
If Resume is set to 2 and a program is stopped by an emergency stop signal or by the
enclosure door switch open signal, the program will restart from point #1.
The default value is 2.