FX-1R_InstructionManual_C_Rev03a.pdf - 第50页
第 1 章 设备概要 1-28 1.7.4.1 激光校正定心流程 激光校正定心流程示图如下。 A D d X B C d Y E (+) 旋转 (+) 旋转 (+) 旋转 校正 吸取元件 (吸嘴中心) (元件中心) 激光校准测定 校正 贴片 寻找测量过程中阴影宽度最小的③④。 吸嘴中心,因已知,从与元件中心之差 Y 方向的偏移 dX X 方向的偏移 dy 此外可根据③或④的 θ 马达的编码输出 得到角度偏移值 d θ 。 校正位置位移 …
第 1 章 设备概要
1-27
1.7.4 定心系统
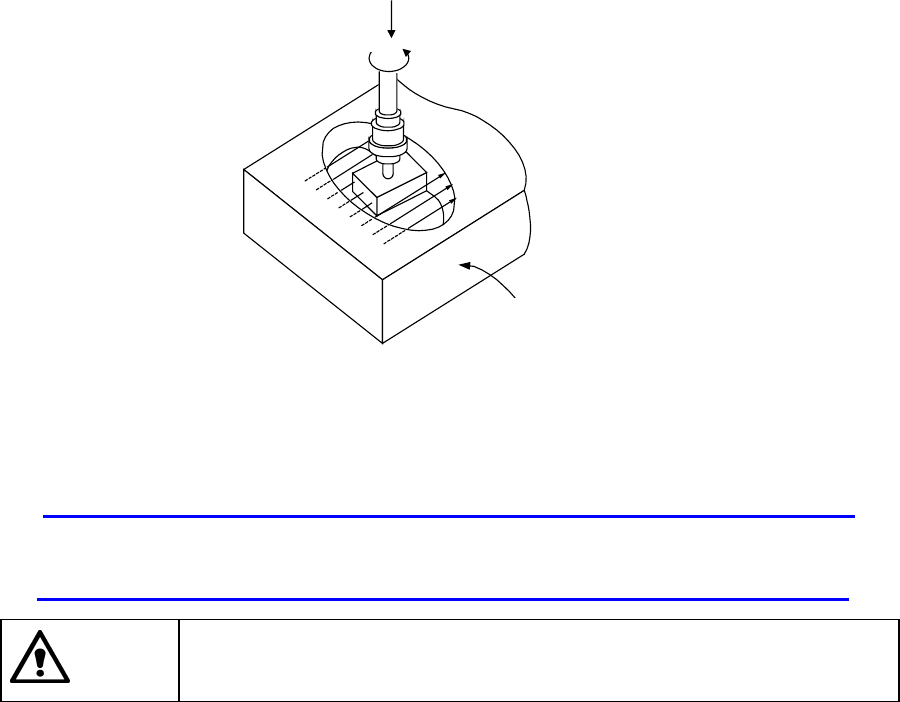
本设备采用激光校准传感器,从侧面照射激光,读取其阴影,识别元件位置、角度的非接触式
定心方式。
レーザ アラインセンサ
θ
Z
图 1.7-7 MNLA 贴片头激光校准
通过Z轴的上下移动、真空吸取元件后,投射激光。
元件遮住激光的部分成为阴影,以
θ
轴旋转元件时,显示阴影宽度的变化。可从阴影
宽度的变化求出所吸取元件的位置偏移及角度偏移,校正该偏移量后进行贴片。
L 激光校准传感器基准为 IEC 825-1 class I 及 CFR 21 class I。
按本说明书指示操作,可以安全使用。
注意
使用本说明书没有记载的步骤进行控制、调整与操作,有引起危险的辐射曝
光的可能性。
激光校准传感器
第 1 章 设备概要
1-28
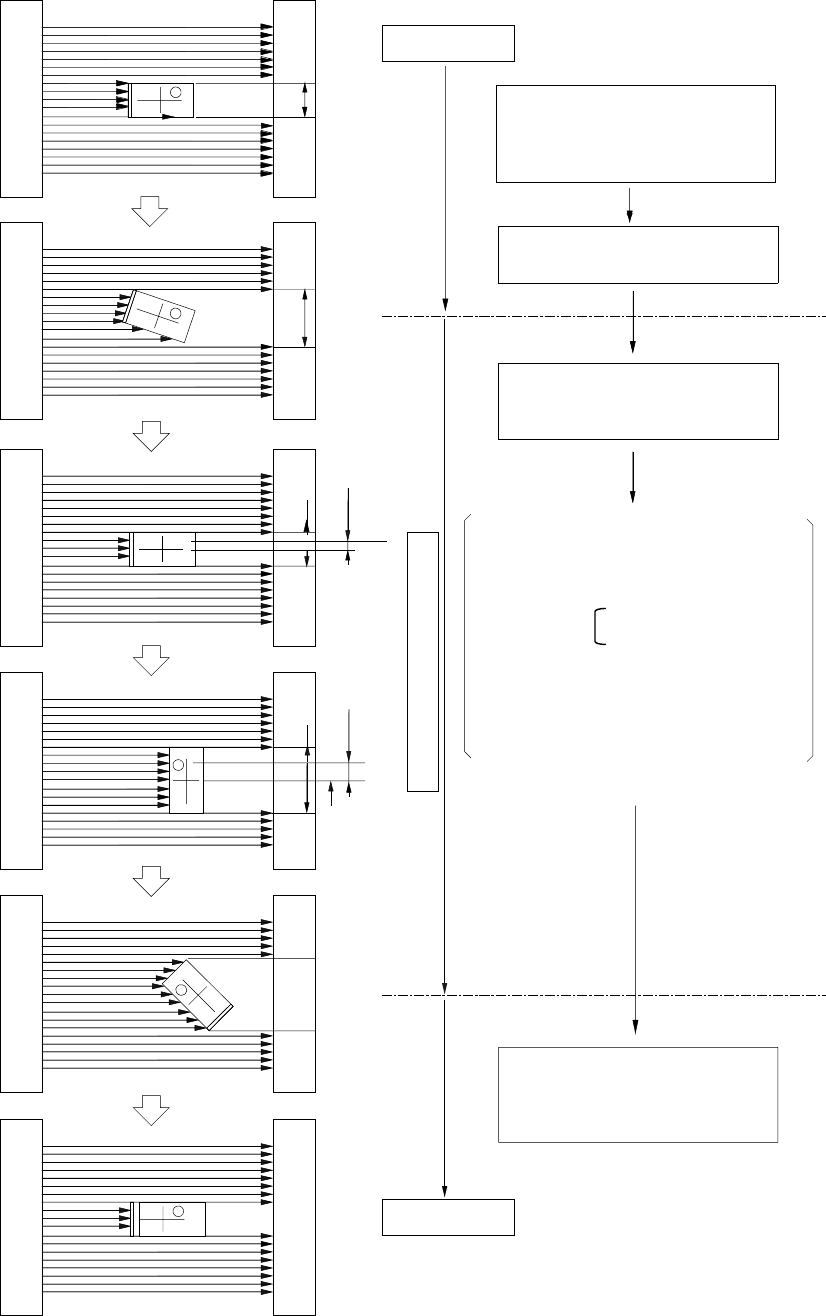
1.7.4.1 激光校正定心流程
激光校正定心流程示图如下。
A
D
d X
B
C
d Y
E
(+) 旋转
(+)旋转
(+)
旋转
校正
吸取元件
(吸嘴中心)
(元件中心)
激光校准测定
校正
贴片
寻找测量过程中阴影宽度最小的③④。
吸嘴中心,因已知,从与元件中心之差
Y 方向的偏移 dX
X 方向的偏移 dy
此外可根据③或④的
θ
马达的编码输出
得到角度偏移值 d
θ
。
校正位置位移 (dX、dY)
校正角度偏移 (d
θ
)
后并贴片
预旋转
通过 Z 轴的驱动来吸取元件,
使元件符合激光校准高度
然后按(-)方向旋转θ轴
(预旋转)
按(+)方向旋转θ轴,
开始激光校准的测定
(-)旋转
(预旋转)
便可知
①
②
③
④
⑤
⑥
第 1 章 设备概要
1-29
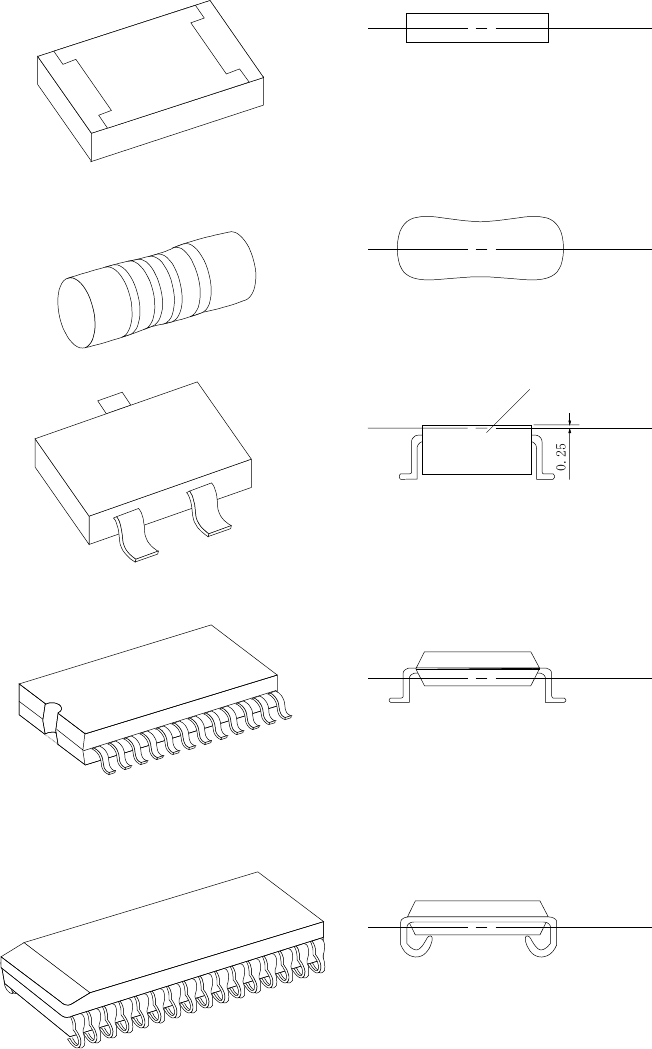
1.7.4.2 主要元件的激光校准测定位置
方形芯片
圆筒形芯
SOT
SOP・TSOP
SOJ
(
元件上下面的中间
)
激光校准测定位置
(元件中心)
模部
(从元件上面向下 0.25mm 的位置)
激光校准测定位置
激光校准测定位置
(元件下底面与脚根部)
(元件下底面与脚根部)
激光校准测定位置
激光校准测定位置