Service Manual HS60.pdf - 第249页
HS -60 Se rvic e Ma nual 7 DLM2 Co l lect&Plac e Head 03/ 2 003 U S Iss ue 7.1 Ov erv ie w 247 7 DLM2 Collect&Place Head 7.1 Overvie w The HS-60 au tomatic pl acem ent system has four 12-segment type DLM 2, o r 6…

6 Modular PCB conveyor system Service Manual HS-60
6.18 Final steps and functions test 03/2003 US Issue
246
6.18 Final steps and functions test
DANGER
During the following functions test, adhere strictly to the safety instructions in Chapter 2.
Æ If the cutter has been removed, you will have to reinstall it, as described in the service man-
ual, Chapter „Cutter, pneumatic“ (see safety instructions in the above mentioned chapter).
Æ If the nozzle changer has been removed, you will have to recalculate the nozzle changer
positions after the changer has been reinstalled (SITEST program).
Æ Remove all tools etc. from the working area of the machine.
Æ Carry out all necessary adjustments and a functions test, depending on how the problems
were solved:
– with the station software, transport menu / width adjustment system,
– with the aid of the SITEST program and according to the „Setting Instructions for HS-60“.
HS-60 Service Manual 7 DLM2 Collect&Place Head
03/2003 US Issue 7.1 Overview
247
7 DLM2 Collect&Place Head
7.1 Overview
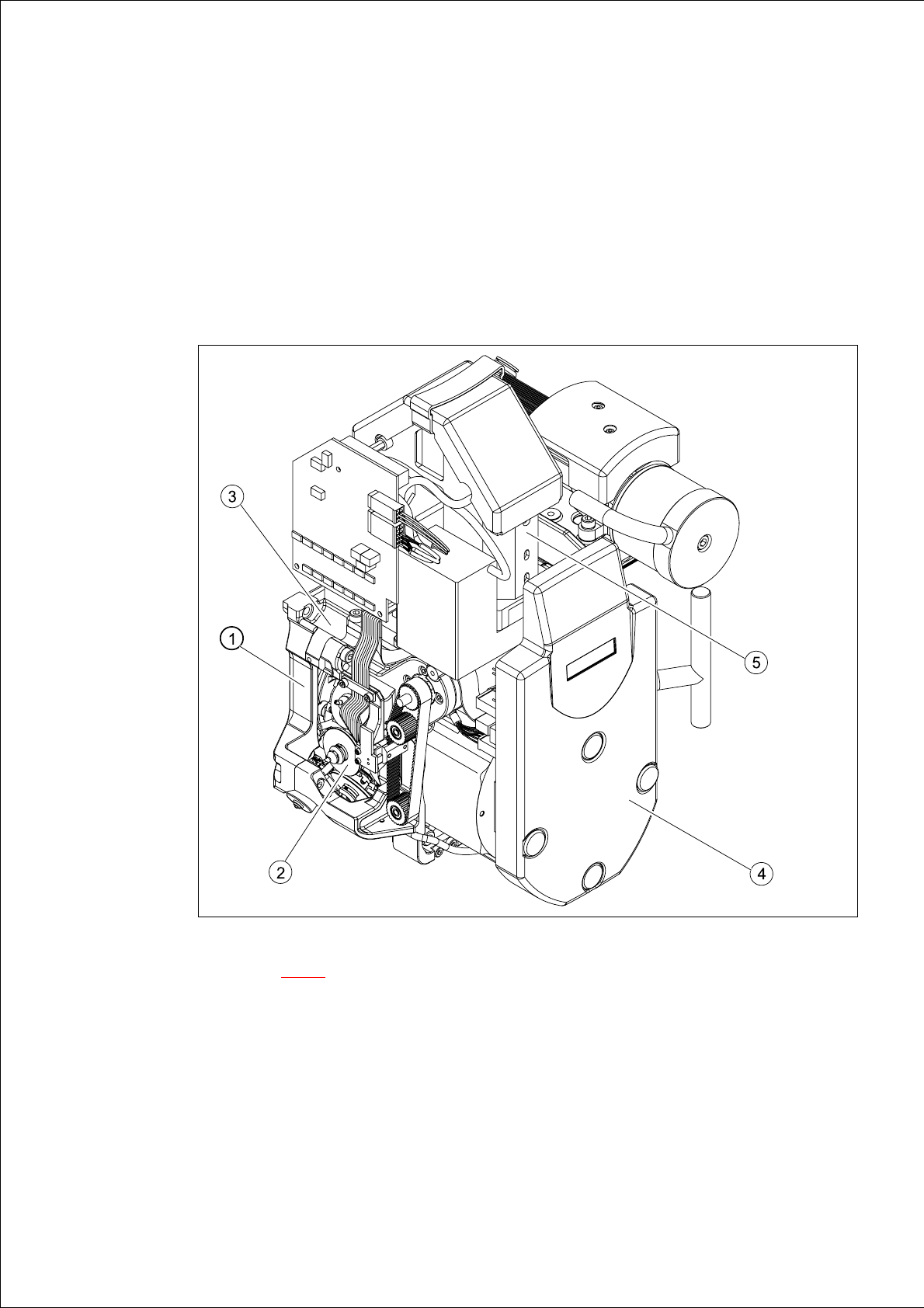
The HS-60 automatic placement system has four 12-segment type DLM2, or 6-segment type
DLM2 collect&place heads. 7
7
Fig. 7.1 - 1 12-segment DLM2 collect&place head - overview
Key to Fig. 7.1 - 1
(1) Back part, complete / DLM2)
(2) Star, fitted with 12 sleeves
(3) Front part, complete / DLM2
(4) SP6_12 intermediate distribution board, digital
(5) 24x24 component camera

7 DLM2 Collect&Place Head HS-60 Service Manual
7.1 Overview 03/2003 US Issue
248
7.1.1 Steps when picking up and placing components
– A PCB moves into the placement area of the PCB conveyor.
– The right-hand collect&place head picks up components from the feeder modules.
– The left-hand collect&place head waits for the fiducial measurement.
– Once the fiducial measurement is complete, the right-hand collect&place head places compo-
nents while the left-hand collect&place head picks up further components.
– The right-hand collect&place head picks up components, and so on.
7.1.1.1 Position and function of the individual star stations (see Fig. 7.1 - 2)
Star station 1 7
Pick-up cycle 7
The nozzle is lowered onto the component. Once the valve positioning unit has opened the vac-
uum circuit to the nozzle, the nozzle draws up the component and removes it from the feeder mod-
ule. 7
Placement cycle 7
The valve positioning unit closes the vacuum channel to the nozzle. The nozzle, together with the
component, is lowered onto the PCB that has been moved into place. A short burst of compressed
air detaches the component from the nozzle and places it on the PCB. 7
Star station 3 7
The valve positioning unit closes the vacuum channel to the nozzle. Defective components are
detached from the nozzle with a short burst of compressed air and are discarded. 7
Star station 7 7
The component is optically centered. 7
Star station 9 7
Pick-up cycle 7
The nozzle is rotated to the pick-up position. 7
Placement cycle 7
The placement angle of the component is corrected or the correct placement angle of the compo-
nent is set. 7