SM411F_FN_TRM(Ver9.7_CS16.15).pdf - 第161页
Page HANWHA TECHWIN 149 SM411F Step Motor Interface (R1-2, R3-4, R5-6) NO. PA R T N O . P ART NAME Q'TY Old No. Stoc k Apply Refere nce 1 J90831 1 20B FR1_FR3_ FR5_DRV_CMD_CABLE_AS SY SM33-VM01 1 J90831 120A 2 J9083…
Page
HANWHA TECHWIN
148
SM411F
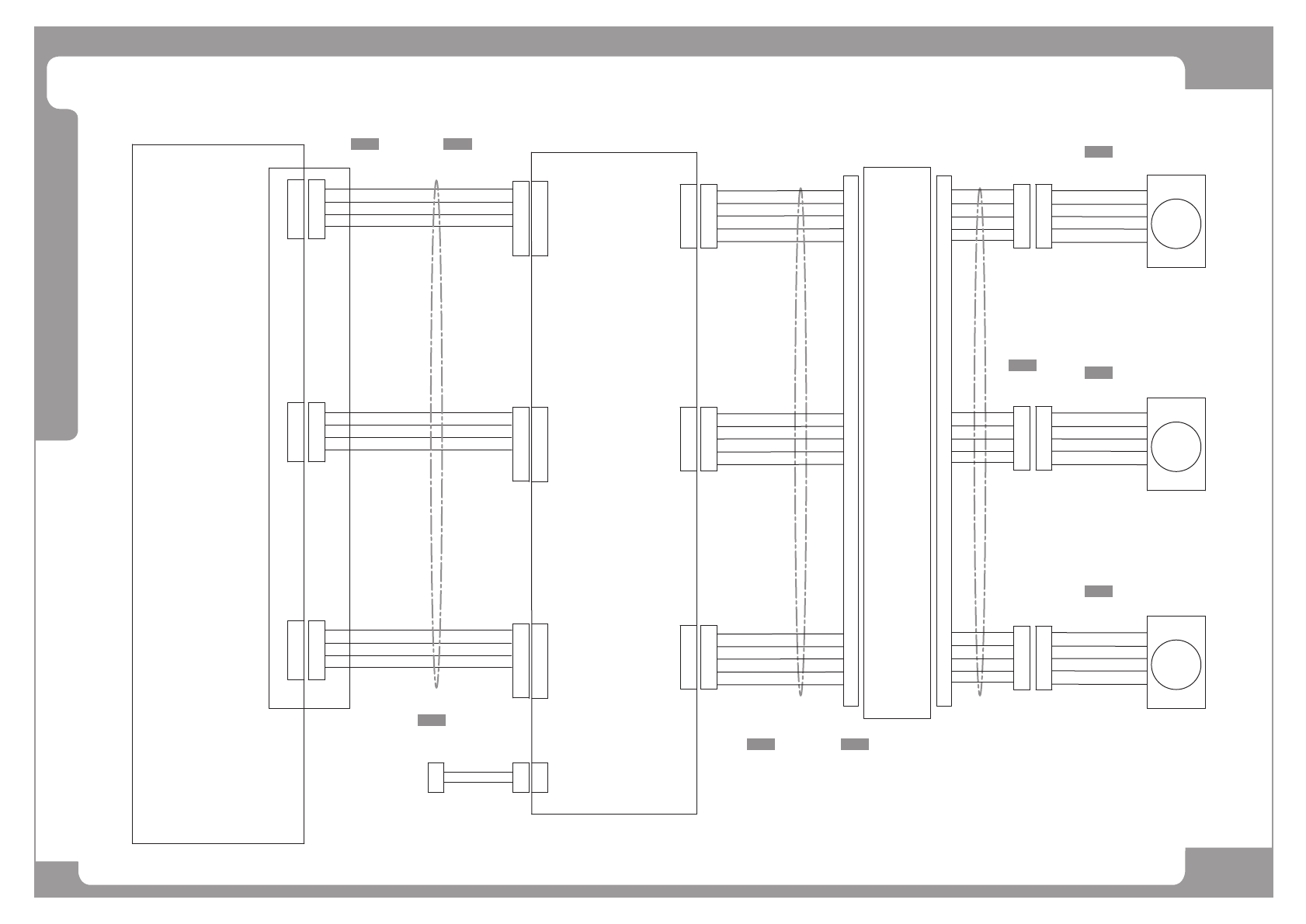
Step Motor Interface (R1-2, R3-4, R5-6)
CN3CN3
11
77
22
88
11
77
22
88
X7043N X7043N
#1 B/D#1 B/D
1POUT+1POUT+
1POUT-1POUT-
1PDIR+1PDIR+
1PDIR-1PDIR-
SM33_VM011(SM33_VM012)SM33_VM011(SM33_VM012)
R AXIS R AXIS
STEPPING STEPPING
DRIVERDRIVER
66
55
44 44
22
33
11
22
33
11
MOT1MOT1
55 55
R-BR-B
R-AR-A
R-CR-C
R-DR-D
SM33_MD017(SM33_MD018)SM33_MD017(SM33_MD018)
R12 STEP MOTORR12 STEP MOTOR
22
11
44
33
55
11
33
22
44
99
33
44
1010
99
33
44
1010
33
55
44
22
11
R34 STEP MOTORR34 STEP MOTOR
44
22
33
11
55
24G24G
SM33_SC011SM33_SC011
1111
55
66
1212
1111
55
66
1212
+24VM+24VM
11
11
22
22
POWERPOWER
44
55
33
22
11
R56 STEP MOTORR56 STEP MOTOR
22
44
33
11
SM33_MD026SM33_MD026
FLAT FLAT
CABLECABLE
66
55
22
11
44
33
SIG1SIG1
SIG2SIG2
SIG3SIG3
11
22
CN10(CN11)CN10(CN11)
S AF E TY C O N TR O LSAFETY CONTROL
& DC POWER B/D& DC POWER B/D
MOT2MOT2
MOT3MOT3
R-ER-E
55
R-BR-B
R-AR-A
R-CR-C
R-DR-D
77
99
88
66
R-ER-E
1010
R-BR-B
R-AR-A
R-CR-C
R-DR-D
1212
1414
1313
1111
R-ER-E
1515
22
44
33
11
55
77
99
88
66
1010
1212
1414
1313
1111
1515
44
22
33
11
55
44
22
33
11
55
R-BR-B
R-AR-A
R-CR-C
R-DR-D
R-ER-E
44
22
33
11
55
44
22
33
11
55
R-BR-B
R-AR-A
R-CR-C
R-DR-D
R-ER-E
44
22
33
11
55
44
22
33
11
55
R-BR-B
R-AR-A
R-CR-C
R-DR-D
R-ER-E
SM33_MD033SM33_MD033
66
55
22
11
44
33
66
55
22
11
44
33
2POUT+2POUT+
2POUT-2POUT-
2PDIR+2PDIR+
2PDIR-2PDIR-
66
55
22
11
44
33
66
55
22
11
44
33
3POUT+3POUT+
3POUT-3POUT-
3PDIR+3PDIR+
3PDIR-3PDIR-
SM33_MD034SM33_MD034
SM33_MD035SM33_MD035
(X7043N (X7043N
#2 B/D)#2 B/D)
^:`
^;`
^<`
^4` ^5`
^7` ^8`
^6`
^9`
Page
HANWHA TECHWIN
149
SM411F
Step Motor Interface (R1-2, R3-4, R5-6)
NO. PART NO. PART NAME Q'TY Old No. Stock Apply Reference
1 J90831120B FR1_FR3_FR5_DRV_CMD_CABLE_ASSY SM33-VM01 1 J90831120A
2 J90831121B RR1_RR3_RR5_DRV_CMD_CABLE_ASSY SM33-VM01 1 J90831121A
3 J90831062E FR_RR_STEP_DRV_PW_CABLE_ASSY 1 J90831062B
4 J90831173C FR_STEP_MOTOR_POWER_CABLE_ASSY 1 J90831173B
5 J90831174C RR_STEP_MOTOR_POWER_CABLE_ASSY 1 J90831174B
6 J90831182D R_STEP_MOTOR_PWR_EXT_CABLE_ASSY 1
7 J90830190B R12_MOTOR_CABLE_ASSY 1
8 J90831009B R34_MOTOR_CABLE_ASSY 1
9 J90831010B R56_MOTOR_CABLE_ASSY 1
Page
HANWHA TECHWIN
150
SM411F
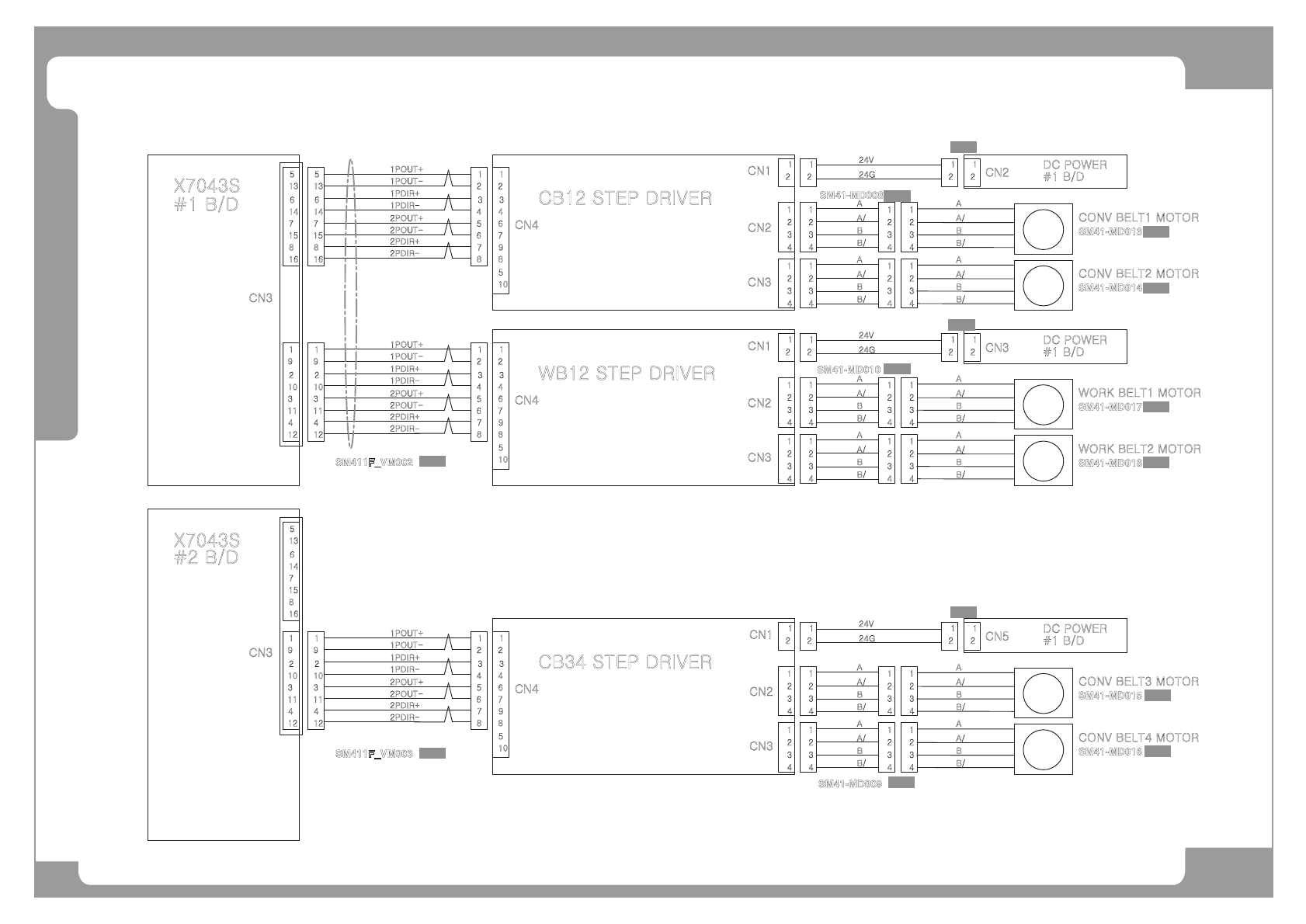
Step Motor Interface (Conveyor Belt)
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
Y
X
Y
X
Y
X
[
Y
Z
X
[
Y
Z
X
Y
X
juX
juY
kjGwv~ly
JXGiVk
Y[n
Y[}
SM33_PW001
SM33_PW001
SM41-MD008
SM33_PW001
SM33_PW001
SM41-MD009
jvu}Gils{XGtv{vy
SM41-MD013
jvu}Gils{YGtv{vy
SM41-MD014
juY
juZ
jiXYGz{lwGkyp}ly
X
Y
Z
]
[
_
`
^
ju[
X
Y
Z
\
[
_
^
]
Xwv|{R
Xwv|{T
XwkpyT
Ywv|{R
YwkpyR
YwkpyT
Ywv|{T
XwkpyR
\
XZ
]
^
X[
X]
_
X\
XW
\
\
XZ
]
^
X[
X]
_
X\
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
Y
X
Y
X
Y
X
[
Y
Z
X
[
Y
Z
X
Y
X
juX
juZ
kjGwv~ly
JXGiVk
Y[n
Y[}
SM41-MD010
~vyrGils{XGtv{vy
SM41-MD017
~vyrGils{YGtv{vy
SM41-MD018
juY
juZ
~iXYGz{lwGkyp}ly
X
Y
Z
]
[
_
`
^
ju[
X
Y
Z
\
[
_
^
]
Xwv|{R
Xwv|{T
XwkpyT
Ywv|{R
YwkpyR
YwkpyT
Ywv|{T
XwkpyR
X
`
Y
Z
XW
XY
[
XX
XW
\
X
`
Y
Z
XW
XY
[
XX
juZ
^W[Zz
JXGiVk
\
XZ
]
^
X[
X]
_
X\
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
iV
i
hV
h
[
Y
Z
X
Y
X
Y
X
Y
X
[
Y
Z
X
[
Y
Z
X
Y
X
juX
ju\
kjGwv~ly
JXGiVk
Y[n
Y[}
SM33_PW001
SM33_PW001
jvu}Gils{ZGtv{vy
SM41-MD015
jvu}Gils{[Gtv{vy
SM41-MD016
juY
juZ
jiZ[Gz{lwGkyp}ly
X
Y
Z
]
[
_
`
^
ju[
X
Y
Z
\
[
_
^
]
Xwv|{R
Xwv|{T
XwkpyT
Ywv|{R
YwkpyR
YwkpyT
Ywv|{T
XwkpyR
X
`
Y
Z
XW
XY
[
XX
XW
\
X
`
Y
Z
XW
XY
[
XX
juZ
^W[Zz
JYGiVk
SM411F_VM002
SM411F_VM003
^9`
^7`
^8`
^:`
^;`
^<`
^43`
^44`
^45`
^4`
^5`
^6`
^6`
^6`