M3plus_OperationManual_j - 第221页
B- 8 認 識 辞 典 B 補正グループ:コネクタ部品 ・コネクタ E 同じ形状のリードが E 方向にのみ存在する部品専用です。 ・コネクタ NSEW N, S , E, W の4 方向にリードが存在する部品で、 各方向ごとにリード本数や形状が異なる場合に 適しています。ただし、それぞれの方向で設定できるリードの形状は 1 種類のみです。 ・異形コネクタ 「コネクタ E 」に「リード欠落」がある場合に設定します。 ・特殊形状 「コネク…

B-7
認
識
辞
典
B
2.1.1 補正タイプの定義
「補正グループ」ごとの「補正タイプ」の種類と定義について説明します。
補正グループ:チップ部品
・標準チップ
部品のリードを探さずに4角を検出し、その4角から中心位置や傾きを算出します。角型チップ
を認識する場合は、この「標準チップ」に設定してください。この設定でうまく認識できないと
きは「特殊チップ」あるいは「極小チップ」で試してください。
・メルフチップ
メルフチップ専用の設定です。
・ベアチップ
ベアチップ専用の設定です。
・円筒チップ
円筒形で形状に方向性のない部品に適しています。
・特殊チップ
「標準チップ」に「リード幅」を認識するパラメータを追加した設定です。外形幅とリード幅が異
なる部品を認識するときに選択します。この設定でうまく認識ができないときは「2 端子」で試
してください。
・極小チップ
部品を認識するときの反射部分が実際の部品サイズよりも小さくなってしまうチップ部品に対し
て設定します。特に 0603 などの小さいチップ部品に適しています。
補正グループ:IC 部品
・2 端子
「標準チップ」に「リード幅」と「リード長さ」を認識するパラメータを追加した設定です。「標
準チップ」および「特殊チップ」で認識できなかった角型チップを認識するときに選択します。
・ミニTr/SOT
N、S 方向に同じ形状のリードが存在し、それぞれの方向のリード数が異なる部品に適していま
す。
・P-Tr
「ミニ Tr/SOT」と同様に N、S 方向にリードが存在し、それぞれの方向のリード数およびリード
形状が異なる部品に適しています。
・SOP
E、W 方向に同じ形状のリードが存在し、それぞれの方向のリード数が等しい部品で、リードが
モールド部分より外側にでている場合に適しています。
・SOJ
「SOP」と同様に E、W 方向に同じ形状のリードが存在し、それぞれの方向のリード数が等しい部
品で、リードがモールド部分より外側に出ていない場合に適しています。
・QFP
N, S, E, Wの4方向に同じ形状のリードが存在し、対面するリード数(N と S および E と W)が
等しい部品で、リードがモールド部分より外側に出ている場合に適しています。
・PLCC
「QFP」と同様に N, S, E, W の 4 方向に同じ形状のリードが存在し、対面するリード数(N と S お
よび E と W)が等しい部品で、リードがモールド部分より外側に出ていない場合に適しています。
・リード欠落
「コネクタ NSEW」で定義した部品タイプの中でリードに欠けた部分のある場合に適しています。
リードの欠落はそれぞれの方向ごとに設定します。

B-8
認
識
辞
典
B
補正グループ:コネクタ部品
・コネクタ E
同じ形状のリードが E 方向にのみ存在する部品専用です。
・コネクタ NSEW
N, S, E, W の4方向にリードが存在する部品で、各方向ごとにリード本数や形状が異なる場合に
適しています。ただし、それぞれの方向で設定できるリードの形状は 1 種類のみです。
・異形コネクタ
「コネクタ E」に「リード欠落」がある場合に設定します。
・特殊形状
「コネクタ NSEW」と同様に、N, S, E, W の 4 方向にリードが存在する部品で、各方向ごとにリー
ド本数や形状が異なる場合に適しています。また、「コネクタ NSEW」ではそれぞれの方向ごとに
1 種類しかリードの形状を設定できませんでしたが、このモードでは 2 種類まで可能です。その
他、多様な形状の部品に対して使用できますが、リード浮き検出機能は使用できません。
補正グループ:特殊部品
・異形チップ
この設定は、「白」または「黒」と認識するかを自動判別する機能を持っているため、ベアチップ
のように、部品とその背景(基板)との反射・非反射関係がはっきりしない部品に適しています。
また、セラミックなどの光る部分をもつ BGA 部品にもこの設定が適しています。
・マーク
この設定は、マークを認識するように部品を認識するため、特殊な形状の部品に適しています。
・特殊長方形
四角形の部品で、4 辺が光ってリードとの区別が困難な場合に、この設定を選択します。
・重心検出
指定されたエリア内の対象 (黒い部分 / 白い部分) の重心を検出しますので、様々な形状の部品が
認識可能です。「重心検出」を行う場合、データ設定後、部品を実際に搭載して搭載位置中心から
部品中心までのズレ量を求めます。その値を[形状]情報の「部品中心ズレ量 XYR」に入力してく
ださい。
・認識なし
画像処理を行いません。
補正グループ:ボール部品
・簡易 BGA
BGA 部品専用の設定です。この設定では、BGA 端子の位置および欠けはチェックされません。
ボール端子数のみチェックします。
・BGA
BGA 部部品専用の設定です。この設定では、BGA 端子の位置を編集することができ、端子の欠
けがチェックできます。
・フリップチップ
フリップチップ部品専用の設定です。サイド照明付きの認識ユニットが装備されている場合のみ
有効です。
B-9
認
識
辞
典
B
2.1.2 部品中心と傾きの検出について
ビジョンシステムでは、部品の中心位置 / 傾きは部品の種類によっていくつかの方法で検出されま
す。
部品によっては、認識処理により求められる中心位置 / 傾きが実際の部品中心 / 傾きとは一致しな
い場合があります。このような場合は、ライブラリデータにもとずいて検出されたデータをオフ
セットし補正します。
ライブラリデータは、通常外形中心を部品中心として定義されます。各辺のリード位置はこの部品
中心を元に定義されます。認識処理では、通常部品の位置を全リード先端の重心位置(以下では認識
中心とする)として求めます。QFP 等は外形中心と認識中心が一致します。この場合は認識中心をそ
のまま部品中心とします。
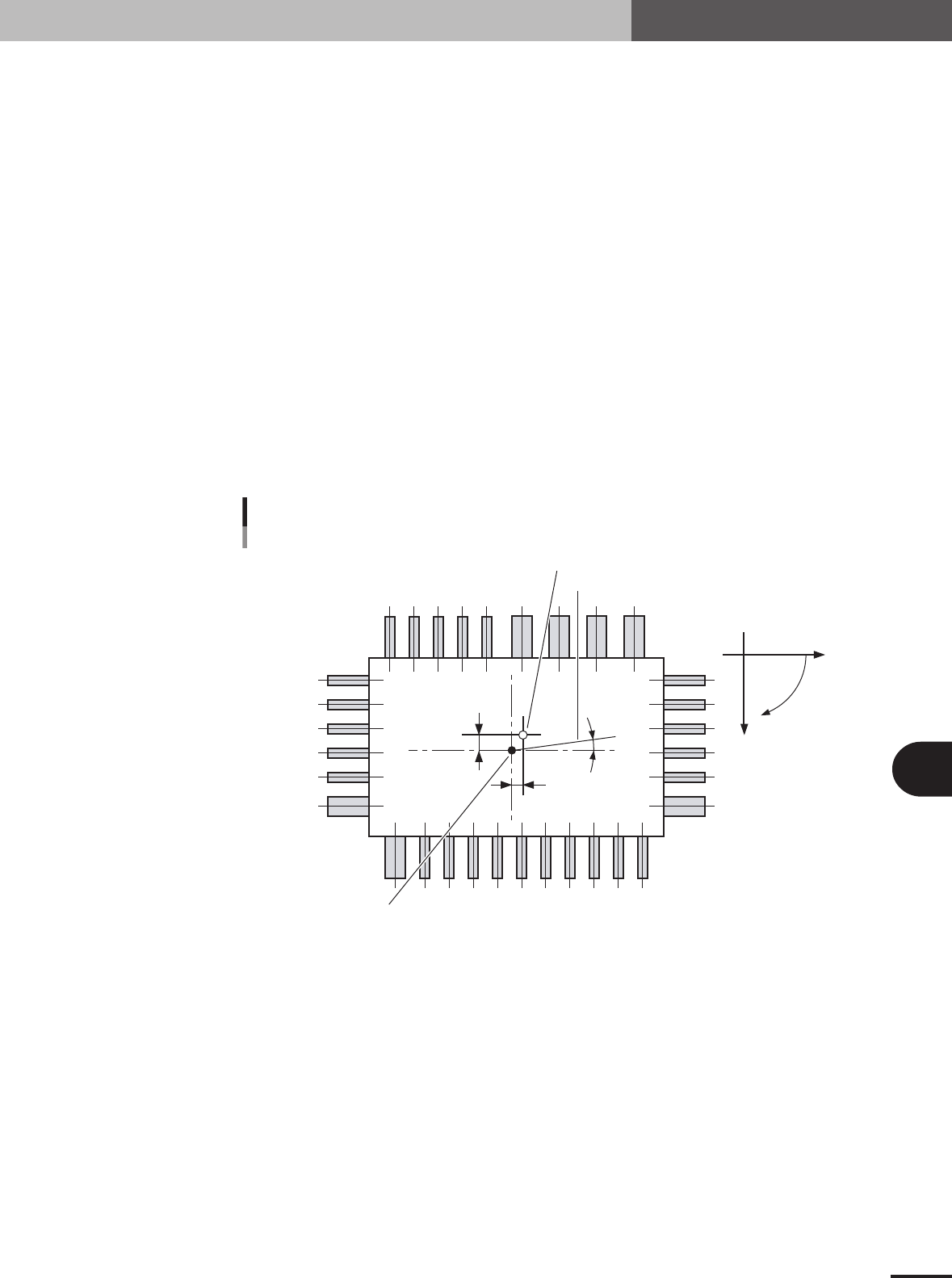
左右 / 上下が非対称の場合は認識中心と部品中心が一般的に一致しません。
このような場合、認識処理では全リード先端の重心位置(X/Y それぞれの座標の平均値)を認識中心
として求めます。そして、定義されている部品データ(ライブラリデータ)から全リードの重心位置
と部品中心のオフセット量をあらかじめ求めておき、それに基づいて認識処理で求められる重心位
置をオフセットして部品中心を求めます。傾きに関しても同様にあらかじめ求めたオフセット量で
認識結果を補正します。
従って、ライブラリのデータと実際の部品の間に誤差が存在すると、この誤差により部品中心への
オフセット補正が正しく行われず実装誤差の原因となる場合があります。オフセット補正を行う部
品 (主に非対称の部品)ではライブラリデータを正確に設定することが必要です。
Offset X
Offset Y
Offset R
検出された角度
座標系
外形中心
Y
X
R
全リードの先端中心
部品中心検出
22B01-E0-10