M3plus_OperationManual_j - 第223页
B- 10 認 識 辞 典 B 2.2 特殊認識設定を使う 通常の補正タイプでは認識できない場合に、特殊認識アルゴリズムを使って認識します。その設定 方法について説明します。 2.2.1 QFP 認識モード QFP 認識モードにはいくつかの特殊認識アリゴリズムが用意されています。 1. アルゴリズム:特殊 1 ( 特殊 Q F P 認識 1 ) 端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。 2. アルゴリ…
B-9
認
識
辞
典
B
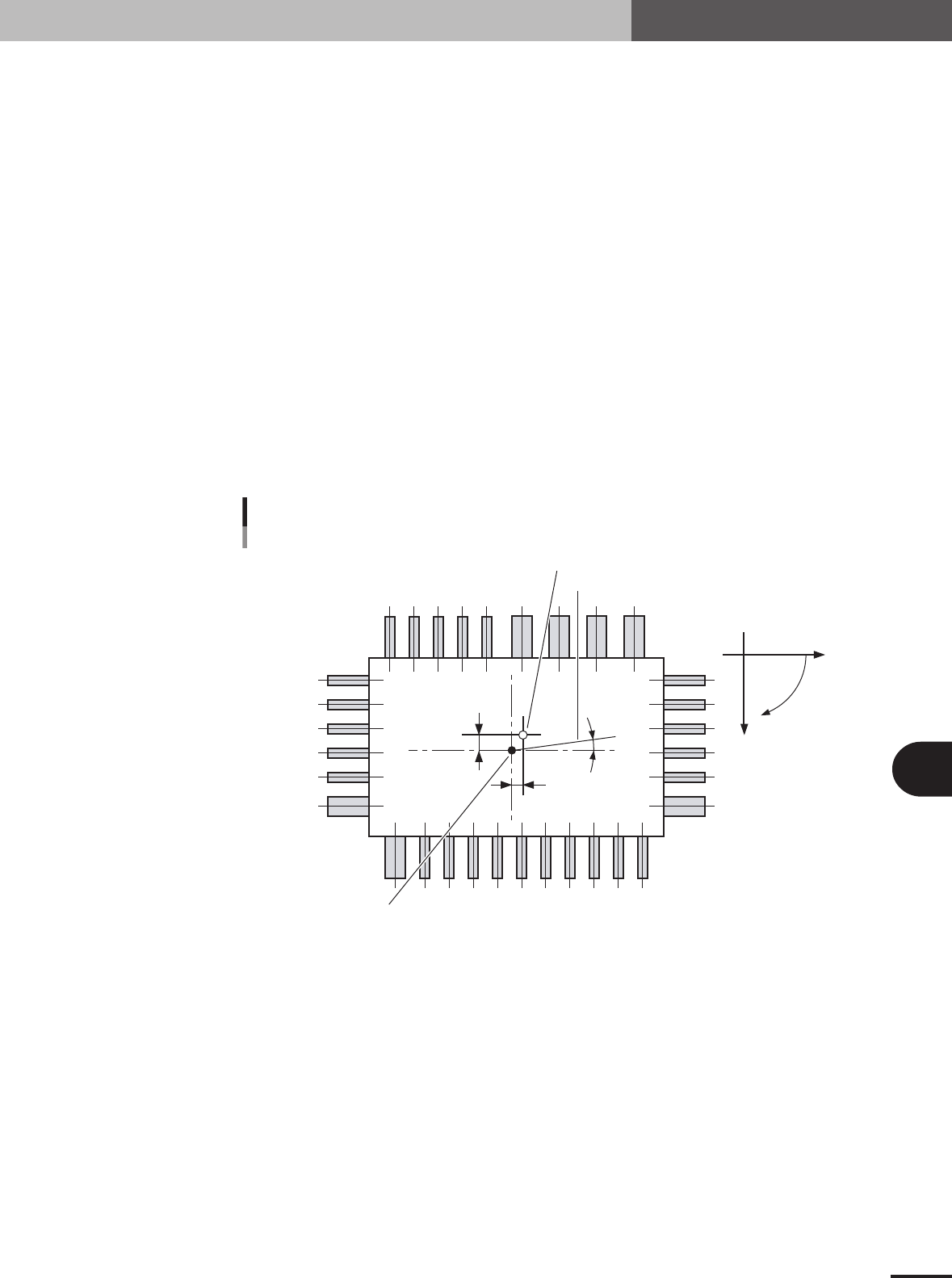
2.1.2 部品中心と傾きの検出について
ビジョンシステムでは、部品の中心位置 / 傾きは部品の種類によっていくつかの方法で検出されま
す。
部品によっては、認識処理により求められる中心位置 / 傾きが実際の部品中心 / 傾きとは一致しな
い場合があります。このような場合は、ライブラリデータにもとずいて検出されたデータをオフ
セットし補正します。
ライブラリデータは、通常外形中心を部品中心として定義されます。各辺のリード位置はこの部品
中心を元に定義されます。認識処理では、通常部品の位置を全リード先端の重心位置(以下では認識
中心とする)として求めます。QFP 等は外形中心と認識中心が一致します。この場合は認識中心をそ
のまま部品中心とします。
左右 / 上下が非対称の場合は認識中心と部品中心が一般的に一致しません。
このような場合、認識処理では全リード先端の重心位置(X/Y それぞれの座標の平均値)を認識中心
として求めます。そして、定義されている部品データ(ライブラリデータ)から全リードの重心位置
と部品中心のオフセット量をあらかじめ求めておき、それに基づいて認識処理で求められる重心位
置をオフセットして部品中心を求めます。傾きに関しても同様にあらかじめ求めたオフセット量で
認識結果を補正します。
従って、ライブラリのデータと実際の部品の間に誤差が存在すると、この誤差により部品中心への
オフセット補正が正しく行われず実装誤差の原因となる場合があります。オフセット補正を行う部
品 (主に非対称の部品)ではライブラリデータを正確に設定することが必要です。
Offset X
Offset Y
Offset R
検出された角度
座標系
外形中心
Y
X
R
全リードの先端中心
部品中心検出
22B01-E0-10

B-10
認
識
辞
典
B
2.2 特殊認識設定を使う
通常の補正タイプでは認識できない場合に、特殊認識アルゴリズムを使って認識します。その設定
方法について説明します。
2.2.1 QFP 認識モード
QFP 認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊 QFP 認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (特殊 QFP 認識 2)
特殊 QFP 認識 1 で横方向のリードのみを使って認識を行うモードです。
3. アルゴリズム:特殊 3 (特殊 QFP 認識 3)
特殊 QFP 認識 1 で縦方向のリードのみを使って認識を行うモードです。
4. アルゴリズム:特殊 4 (リード長さチェック機能付き QFP 認識)
通常の QFP 認識にリード長さのチェック機能を追加したモードです。リード先端に当てはめた直
線と各リード先端の距離が指定された距離以下であることをチェックします。この割合は認識オ
プション 3 に 1/100 mm 単位の値として設定します。設定できる値は 0 ∼ 127 (0.01 ∼ 1.27
mm) です。
2.2.2 単一コネクタ認識モード
コネクタ認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊コネクタ認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (ロングコネクタ外縁部のみ認識)
コネクタの両側の複数リードのみを使って認識するモードです。
3. 補正タイプ:異形コネクタ
単一方向のみのコネクタ(コネクタ E)に対して、リードが欠落している部分のあるコネクタを認識
します。認識方法は単一方向コネクタと同様です。
2.2.3 4 方向コネクタ認識モード(コネクタ NSEW)
4 方向コネクタ認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊コネクタ認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (ロングコネクタ外縁部のみ認識)
コネクタの両側の複数リードのみを使って認識するモードです。認識オプション 2 に両端の検出
するリード数を設定します。
3. 補正タイプ:リード欠落
4 方向コネクタ(コネクタ NSEW)に対して、リードが欠落している部分のある部品を認識します。
認識方法は 4 方向コネクタと同様です。
B-11
認
識
辞
典
B
2.2.4 マーク型認識モード
マーク型認識にはいくつかのアルゴリズムが用意されています。
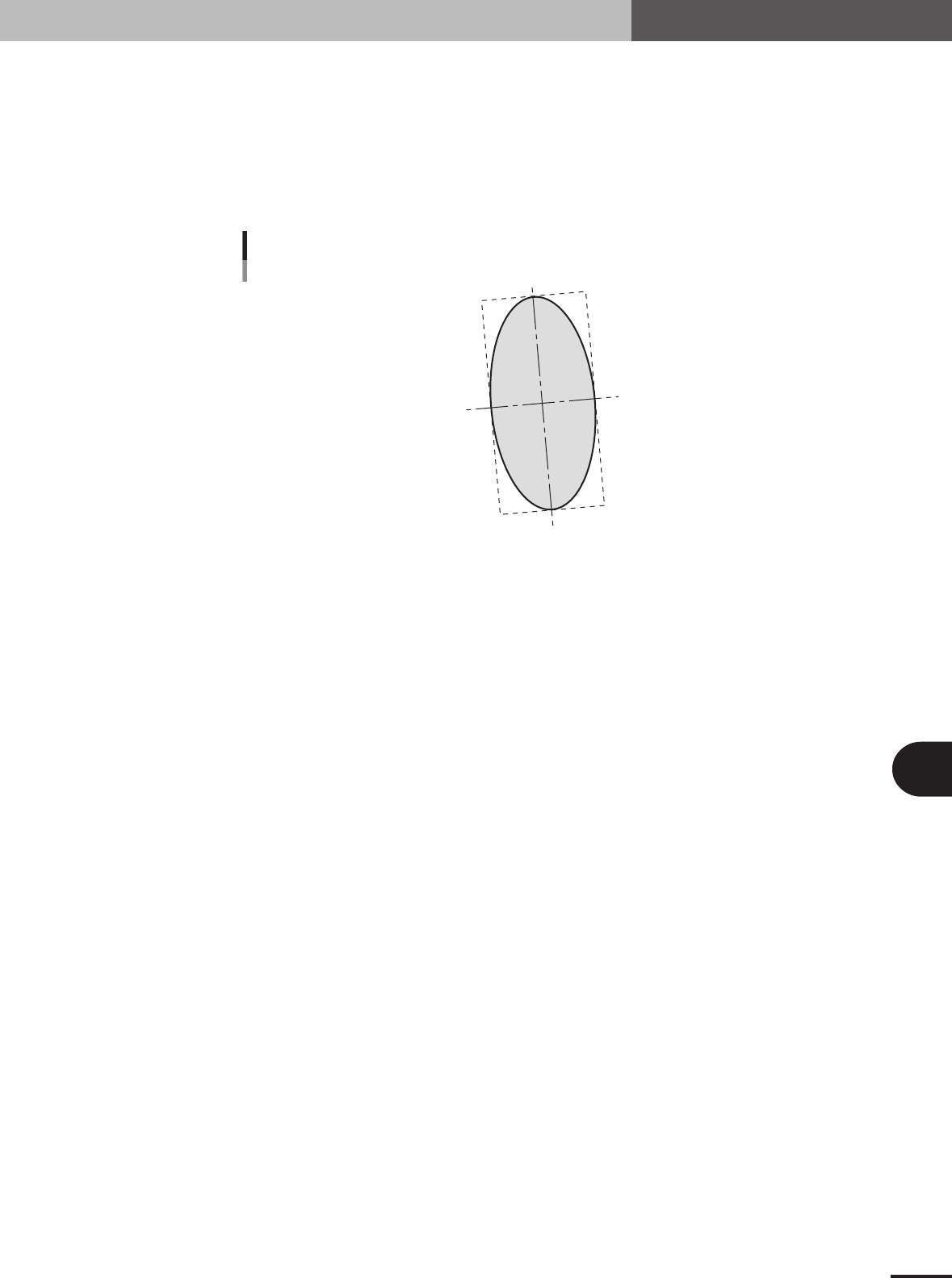
1. 補正タイプ:マーク (1 つの部分からなる部品)
右図のような形状が 1 つの部分からなる部品を認識するアルゴリズムです。
不定形の部品を認識する場合に用います。部品の中心は重心位置、傾きは主軸の傾きとして求め
られます。従って円 / 正方形などの場合は傾きは求められません。(主軸が存在しないため)
C
補正タイプ:マーク
22B02-E0-10
■ マーク型部品
補正グループ 特殊部品
補正タイプ マーク
部品しきい値 2 値化レベルを設定します。(0 なら自動で 2 値化レベ
ルを設定します。)
公差 形状公差を指定します。
リード検出範囲 検出の範囲を設定します。
外形寸法 X mm 外形サイズを設定します
外形寸法 Y mm 外形サイズを設定します
部品厚さ mm 外形サイズを設定します
部品表面タイプ 反射部品 / 非反射部品から選択します部品が白く見え
ていれば反射、そうでなければ非反射を選択します
部品外ノイズカット数 0 ∼ 7 から選択します
部品内ノイズカット数 0 ∼ 7 から選択します
ノイズカット優先順 部品内優先 / 部品外優先から選択します