M3plus_OperationManual_j - 第231页
B- 18 認 識 辞 典 B 2.2.5 特殊長方形認識モード このアルゴリズムでは長方形 / 正方形の部品を認識できます。 1. 輪郭検出 部品の輪郭を抽出します。 2. 検出 範囲の設定 検出した輪郭上で、上 / 下 / 左 / 右それぞれに検出範囲を設定します。 ( パラメータ設定により上下 左右のどれを検出対象とするかを設定できます。 ) 3. 直線 の当てはめ 設定された範囲の輪郭座標に対して直線を当てはめます。この処理を …

B-17
認
識
辞
典
B
リード本数 1S リード数を設定します
反射リード長 1S リード幅 1S 下リード部分の大きさ(面積)を設定します。長方形の
場合はリード長 x リード幅で、円形の場合は、リー
ド長 =0 としてリード幅で円の直径を指定します。
リードピッチ 1S 下リード部分間のピッチを設定します
検出位置 X 1S 検出位置 Y 1S 下左リード部分の重心位置を設定します
リード本数 2S ∼ 検出位置 Y 2S リードグループ数が 2 の場合は、グループ 2 のデー
タを設定する。リードグループ数が 1 の場合は 0。
リードグループ E リードグループ数を設定します(1or2)
リード本数 1E リード数を設定します
反射リード長 1E リード幅 1E 右リード部分の大きさ(面積)を設定します。長方形の
場合はリード長 x リード幅で、円形の場合は、リー
ド長 =0 としてリード幅で円の直径を指定します。
リードピッチ 1E 右リード部分間のピッチを設定します
検出位置 X 1E 検出位置 Y 1E 右上リード部分の重心位置を設定します。
リード本数 2E ∼ 検出位置 Y 2E リードグループ数が 2 の場合は、グループ 2 のデー
タを設定する。リードグループ数が 1 の場合は 0。
リードグループ W リードグループ数を設定します(1or2)
リード本数 1W リード数を設定します
反射リード長 1W リード幅 1W 左リード部分の大きさ(面積)を設定します。長方形の
場合はリード長 x リード幅で、円形の場合は、リー
ド長 =0 としてリード幅で円の直径を指定します。
リードピッチ 1W 左リード部分間のピッチを設定します
検出位置 X 1W 検出位置 Y 1W 左上リード部分の重心位置を設定します。
リード本数 2W ∼ 検出位置 Y 2W リードグループ数が 2 の場合は、グループ 2 のデー
タを設定する。リードグループ数が 1 の場合は 0。
その他 0 に設定
B-18
認
識
辞
典
B
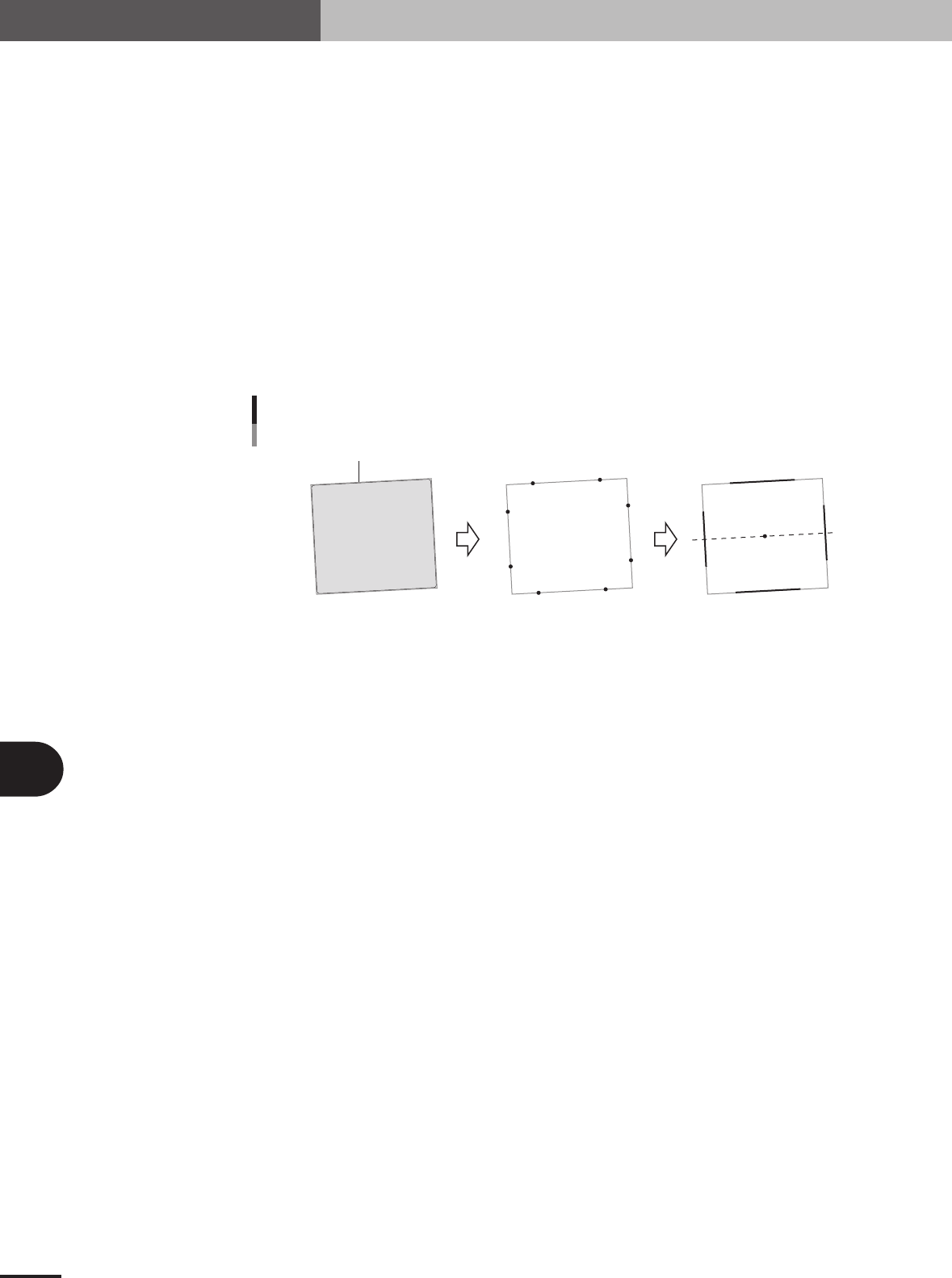
2.2.5 特殊長方形認識モード
このアルゴリズムでは長方形 / 正方形の部品を認識できます。
1. 輪郭検出
部品の輪郭を抽出します。
2. 検出範囲の設定
検出した輪郭上で、上 / 下 / 左 / 右それぞれに検出範囲を設定します。(パラメータ設定により上下
左右のどれを検出対象とするかを設定できます。)
3. 直線の当てはめ
設定された範囲の輪郭座標に対して直線を当てはめます。この処理を 4 つの方向に対してそれぞ
れ行います。(上下左右のどれを検出対象とするかに従って直線を求めます。)
4. 部品中心、傾き検出
求められた 4 つの直線の傾きを平均して部品の傾きとします。また対象物の重心を部品中心とし
ます。(上下左右のどれを検出対象とするかにより、対応した方法で傾きが求められます。)
P1
P5
P6
P7
P0
P2
P3
P4
P1
P5
P6
P7
P0
P2
P3
P4
特殊長方形
輪郭を検出する
22B07-E0-10
■ 特殊長方形認識
補正グループ 特殊部品
補正タイプ 特殊長方形
部品しきい値 2 値化レベルを設定します。(0 なら自動で 2 値化レベ
ルを設定します。)
公差 形状公差を指定します。
リード検出範囲 検出の範囲を設定します。
外形寸法 X 外形サイズを設定します
外形寸法 X 外形サイズを設定します
外形寸法 Y 外形サイズを設定します
部品厚さ 外形サイズを設定します
リード本数 1W 0 に設定
部品表面タイプ 反射部品 / 非反射部品から選択します
部品外ノイズカット数 0 ∼ 7 から選択します
部品内ノイズカット数 0 ∼ 7 から選択します
ノイズカット優先順 部品内優先 / 部品外優先から選択します
リード本数 N この方向の直線検出を行いたくない場合に 0 以外を
設定する
リード本数 S この方向の直線検出を行いたくない場合に 0 以外を
設定する
リード本数 E この方向の直線検出を行いたくない場合に 0 以外を
設定する
リード本数 W この方向の直線検出を行いたくない場合に 0 以外を
設定する
B-19
認
識
辞
典
B
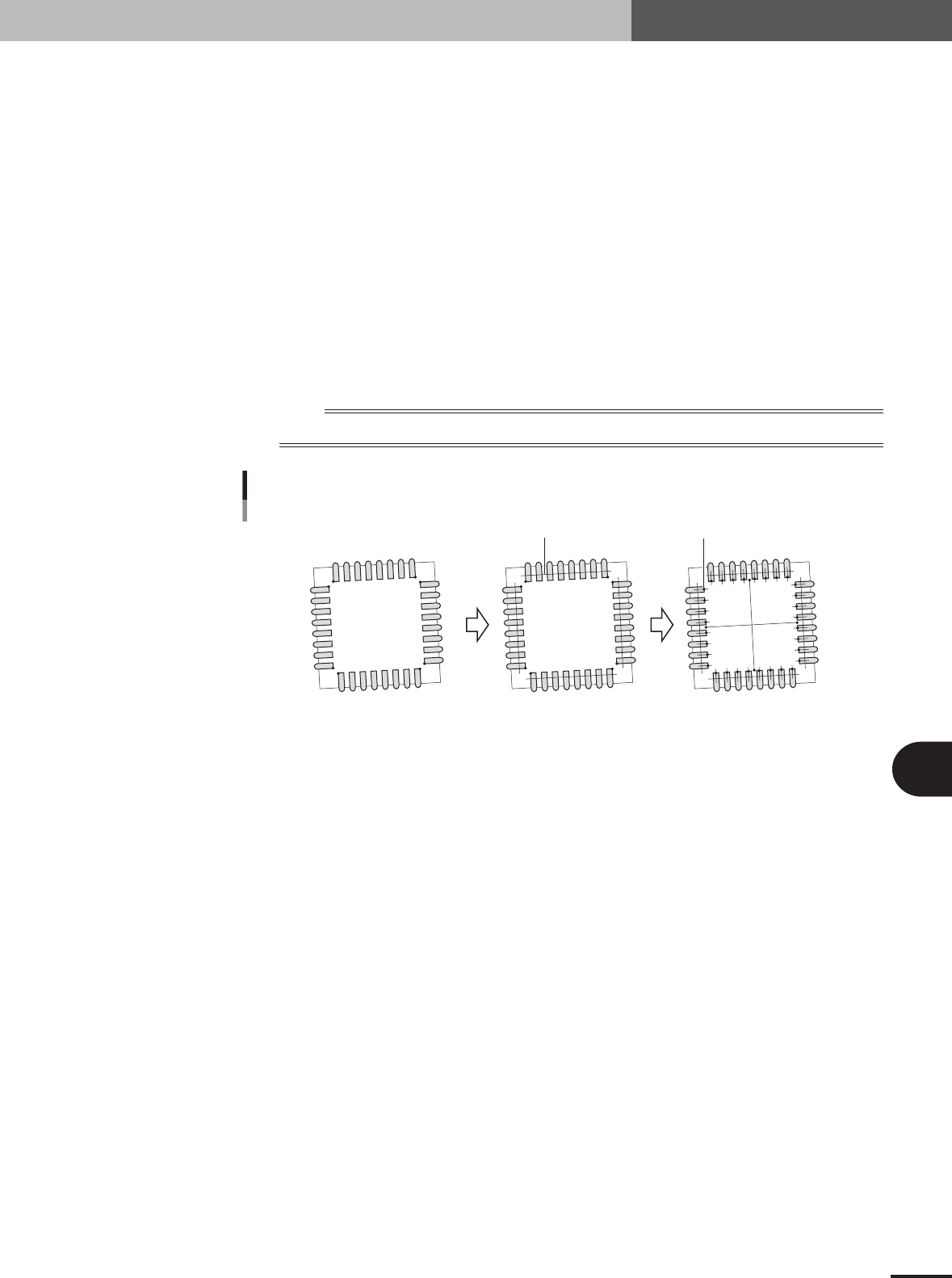
2.2.6 PLCC(SOJ)根本認識モード
PLCC(SOJ)認識には、 リードの根本を検出する特殊認識モードが用意されています。
1. リード検出
このモードでは P0 ∼ P7 を下左図のようにリードの根本方向に求めます。
2. リードの中心設定
求めた P0 ∼ P7 に対して指定される値だけオフセットした直線上で濃度分布からリードの中心
を求めます。(上右図)
3. リード根本端の検出
求めたリードの中心を通り、濃度分布をとった直線に垂直な直線上でリードの根本の端を検出し
ます。
4. 部品中心、傾き検出
求められた全てのリードの根本位置を平均して部品中心とし、対辺の中心を結んだ直線の傾きを
平均して部品の傾きとします。
n
要点
リード検出位置の設定は、リードの根本位置を設定するように値を変更する必要があります。
P1
P0
P4
P6
P5
P7
P3
P2
P1
P0
P4
P6
P5
P7
P3
P2
PLCC (SOJ) 根本認識
オフセットした直線
リードの中心、根本の端
22B08-E0-10
■ PLCC 根本認識
補正グループ 特殊部品
補正タイプ 特殊形状
部品しきい値 2 値化レベルを設定します。(0 なら 30)
公差 形状公差を指定します。
リード検出範囲 検出の範囲を設定します。
外形寸法 X 外形サイズを設定します
外形寸法 Y 外形サイズを設定します
外形厚さ 外形サイズを設定します
中心ズレ量 X mm
中心ズレ量 Y mm
中心ズレ量 R°
検出ライン位置 N N 方向の検出ラインをオフセットする量を画素単位で
設定します。
検出ライン位置 S S 方向の検出ラインをオフセットする量を画素単位で
設定します。
検出ライン位置 E E 方向の検出ラインをオフセットする量を画素単位で
設定します。
検出ライン位置 W W 方向の検出ラインをオフセットする量を画素単位
で設定します。
検出ライン幅 リード検出ラインの幅を設定します。
アルゴリズム 特殊 1