M3plus_OperationManual_j - 第58页
2- 25 基 本 的 な 操 作 に つ い て 2 4. 生産開始と終了 「エッジ位置」 リードや部品のエッジの位置にクロスカーソルが表示されます。 「最終位置」 部品の中心位置にクロスカーソルが表示されます。 ・ マークモニタモード マーク認識時のモニタ上への表示モードを設定します。設定された項目により画像上へ認識結果 の数字や2値化画像などが表示されます。このモニタモードは、運転中でも変更可能です。 「なし」 カメラで撮像した画…
2-24
基
本
的
な
操
作
に
つ
い
て
2
4. 生産開始と終了
■モニタ:ビジョン
自動運転で基板マークやバッドマーク、部品などを認識したとき認識画像を表示します。マルチ
カメラによる部品認識の場合、高速かつ連続に部品認識を行いますので最後に認識される部品の
み表示します。
モニタ:ビジョン
26307-E5-10
・ 拡大、縮小ボタン
拡大 (+) ボタンを押すと認識結果画像を1から 16 倍まで拡大できます。また、縮小 (‐) ボタン
を押すと 1/16 まで縮小できます。ただし、拡大したとき、滑らかだった部品のエッジ部分がギ
ザギザの階段状になったり、縮小したとき、周囲に灰色部分が見えたりしますがこれは不具合で
はありません。
・ 画像上下左右移動ボタン
画面の右側上下にある矢印ボタンは画像の上下移動ボタンです。また画面の下側左右にある矢印
ボタンは画像の左右移動ボタンです。画面上に表示されない画像の周囲を見たいときに使用しま
す。
・ 部品モニタモード
部品認識時のモニタ上への表示モードを設定します。設定された項目により画像上へ認識結果の
数字や検出範囲の線などが表示されます。このモニタモードは、運転中でも変更可能です。
「なし」
カメラで撮像した画像が表示されます。認識結果などの数字は表示されません。
「認識結果」
認識結果のX、Y、R方向の位置 (画素) や検出リード数などの情報が表示されます。ただし、
部品の認識タイプによって表示される項目が異なりますので注意してください。
「検出範囲」
部品の検出範囲が線描画されます。もし、部品が検出範囲からはみ出ているときは正しい部品
認識ができませんので、吸着状態の確認または部品データを修正してください。
「基準位置」
リードや部品の端面検出の基準となる位置がクロスカーソルで表示されます。
「検出ライン」
チップ系部品の場合は部品上に、リード付き部品ではリード上に、部品検出に利用した線が表
示されます。検出ラインの位置が異常な場合は、部品認識パラメータの調整をしてください。

2-25
基
本
的
な
操
作
に
つ
い
て
2
4. 生産開始と終了
「エッジ位置」
リードや部品のエッジの位置にクロスカーソルが表示されます。
「最終位置」
部品の中心位置にクロスカーソルが表示されます。
・ マークモニタモード
マーク認識時のモニタ上への表示モードを設定します。設定された項目により画像上へ認識結果
の数字や2値化画像などが表示されます。このモニタモードは、運転中でも変更可能です。
「なし」
カメラで撮像した画像が表示されます。認識結果などの数字は表示されません。
「認識結果」
検出したマークの中心位置座標 (画素) などが表示されます。
「2値画像」
カメラで撮像した画像を2値化した結果画像が表示されます。
「多値画像」
カメラで撮像した画像を画像処理した後の多値画像が表示されます。
「追跡結果]
マークのほぼ周囲を1周するような線が描画されます。
「基準円」
検出されたマークの中心から設定データ直径のマークが描かれます。(特定の認識モードのみ可
能)
「内外接円」
検出されたマークの中心から内接する円と外接する円が描かれます。(特定の認識モードのみ可
能)
「誤差画像」
誤差画像が表示されます。 (特定の認識モードのみ可能)
「個別データ」
複数の物体が検出される場合に、個別のデータが表示されます。 (特定の認識モードのみ可能)
・ 画像確認ボタン
マシンが停止した時点で、その直前の画像を確認・保存できます。但し、この機能は自動運転を
継続しながら画像を撮り続ける機能ではありません。
2-26
基
本
的
な
操
作
に
つ
い
て
2
4. 生産開始と終了
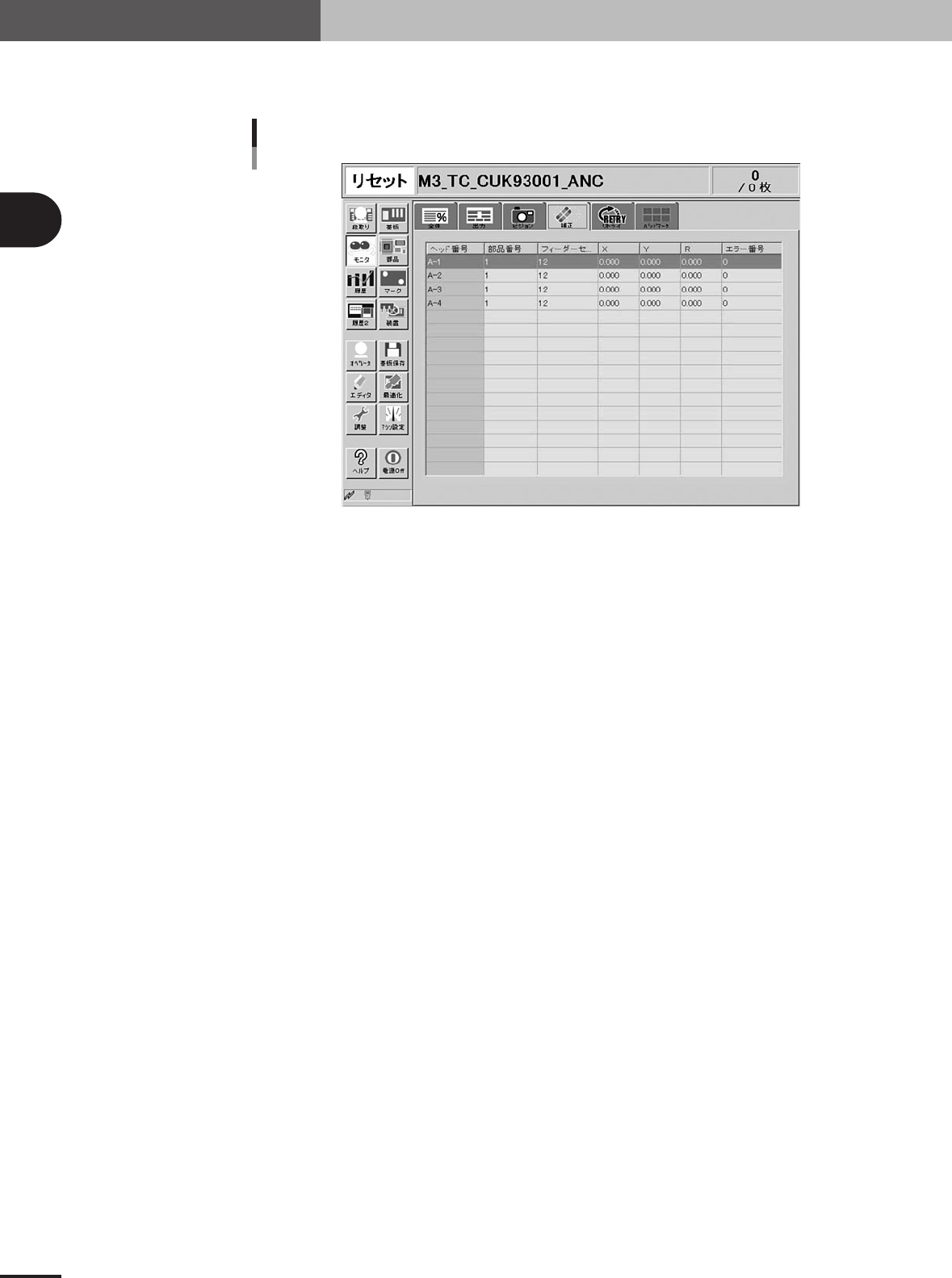
■ モニタ: 補正
自動運転中の部品認識結果の補正量、エラーコードなどが一覧表形式で表示されます。
モニタ:補正
26308-E5-20
・ ヘッド番号
ヘッドの本数分表示されます。現在の吸着から始まる1シーケンスで利用されているヘッド番号
の認識結果が表示されます。ただし、表示はカメラによる画像認識終了後です。
・ 部品番号
そのヘッドが吸着し、認識した部品の番号が表示されます。
・ フィーダーセット番号
そのヘッドが吸着し、認識した部品のフィーダー番号が表示されます。
・ 補正量X、Y、R
そのヘッドが認識した部品の補正量を表示します。この数値はノズルの中心からの位置ずれ量を
表示します。
・ エラー番号
そのヘッドが認識に失敗したときのエラー番号が表示されます。